船体表面海生物清理系统及其清理方法与流程
1.本发明涉及船体维护技术领域,特别涉及一种船体表面海生物清理系统及其清理方法。
背景技术:
2.众所周知,海洋污损生物也称海洋附着生物,是附着丛生在水下人工设施及舰船等海洋结构物表面并导致其损坏或产生不良影响的动物、植物和微生物的总称。海洋附着生物对海洋结构物造成损坏或影响其使用性能称为污损,对海洋附着生物的防除称为防污,生物污损已经成为人类征服海洋的一个难以逾越的障碍。其中,海洋附着生物对船舶的危害主要包括以下几个方面:(1)增加船舶航行阻力,降低航行速度,增加燃料消耗。污损生物的附着会导致船体和螺旋桨表面粗糙度增大,增加船舶航行时的行进阻力,使得航速降低,货物中转周期大大延长,船舶的有效载重降低,燃料消耗大大增加。(2)改变金属材料表面特性,加速金属腐蚀,污损生物的附着丛生会造成海洋结构物的防护涂层破坏和基底材料的腐蚀,其破坏程度与涂层类型、基底材料类型及附着生物种群有关,污损生物会导致其附着区域内的ph值、溶氧浓度及其他溶解质浓度在空间上分布不均匀,从而改变金属材料腐蚀的速率或进程。使得船舶进坞维修周期也会随之增大,船底污损清理成本提高、船舶占坞时间增加,船舶的使用寿命也大大缩短。(3)会引起二氧化碳排放增加的环境问题,以及外来物种入侵的生态问题。
3.浸入海水中的物体,由于受到一系列物理、化学和生物因素的作用,其表面很快会覆盖一层聚合物材料形成的薄膜,通常称为调节膜。调节膜的主要成分是蛋白质大分子,它会使物体表面电学特性和溶质浓度等发生改变,成为浮游生物附着、繁殖、形成微生物膜的基础。随着调节膜的形成,细菌、单细胞真核生物和多细胞真核生物依次在海洋结构物表面附着,形成一个复杂的生态系统,黏附在材料表面的细菌大量分泌细胞外产物,将细菌与细菌、细菌与附着底物相互连接形成一层由细菌和硅藻为主的生物膜。大型海洋生物的幼虫和孢子一旦接近带有生物膜的表面后便会发生如下过程:表面接触
→
表面滑动
→
找寻适当位置
→
分泌黏液增强附着
→
一系列变态生长
→
生长繁殖扩大,最终形成规模较大的污损生物群落。
4.目前,人们采取了各种各样的防除方法,根据其原理的不同可大致分为物理防污法、化学防污法和生物防污法三大类。比如说物理防污法,物理防污法是指物理清除或通过物理方法减少或阻止污损生物的附着,从而达到防污的目的。大部分传统防污方法都属于物理防污法。物理防污法包括机械清除法、空穴化水喷射流除污法等。其中,机械清除法借助相应的设备在船底或水下设施表面进行清洗和刮除,以减少生物附着或使之完全脱落。虽然机械清除法操作简单,成本低廉,对较大的无脊椎生物等效果显著。但主要缺点是不能防止污损过程的发生,只能在附着之后进行清理,通常是利用正常停机期间进行作业。机械清除法可以是人工清除,也有采用水下机器人清除的,其清除效率不高,容易损坏船体构件,应用受到限制。空穴化水喷射流除污法利用空穴化水流中的空穴在高压喷射破裂时产
生的局部应力来清除污损生物。结构物表面的涂料质地较软,会降低空穴破裂的裂度,在清除过程中不会受到破坏。研究表明在3.5mpa压力的喷射流作用下已有很好的清除效果而即使是在高达21mpa的高压水流冲击时对涂料也只有很小的损坏。近年来,该方法虽然在国内已经得到应用,但附属设备较复杂,清除成本较高。
5.专利cn 109319059 a,公开了一种船体高压旋转水流清理设备及其使用方法,包括水下机器人、基座和高压水流清理组件;高压水流清理组件包括与水下机器人连接高压水管及数个喷头;喷头包括旋转座、旋杯和柔性高压水管;向柔性高压水管内注入高压水后,柔性高压水管因为压力而高速旋转,旋转的高压水流产生持续冲击船体表面的震波,将附着的海洋污损清除。柔性高压水管的旋转动力来自于注入的高压水,无需rov为其提供动力,如此便无需设置旋转动力传递转化的机构,优化了清理设备的机构,降低了清理设备的制造成本。专利cn 111422314 a,公开了一种船体表面附着物清理设备,所述船体表面附着物清理设备包括清理装置,所述清理装置包括:行走单元,用于在船体表面上行走;磁吸单元,其连接到所述行走单元,且所述磁吸单元具有磁力以吸附于船体;以及清理单元,用于清理船体表面;所述清理单元具有:冲击铲,其通过回转机构连接至所述行走单元,从而能够通过实是回转机构的转动来调节所述冲击铲的铲击方向。虽然上述专利都能实现对船体表面的海生物进行清理。但是,上述专利均不能防止污损过程的发生,只能在附着之后进行清理,通常是利用正常停机期间进行作业,清除效率低。而采用水下机器人清除,不仅清除效率不高,还容易损坏船体构件,应用受到限制。
技术实现要素:
6.针对现有技术存在的不足,本发明所要解决的技术问题是,提供一种结构简单,可有效阻止污损过程的发生,大大提高了船体表面清理质量和效率,且清理成本低的船体表面海生物清理系统及其清理方法。
7.本发明为实现上述目的采用的技术方案是:一种船体表面海生物清理系统,包括用于对船体表面进行冲刷以防止海生物附着于船体表面的冲刷装置,以及用于对船体表面冲刷后还附着有的海生物进行清理的清理装置,所述冲刷装置包括将浸入海水中的船体进行包覆后与船体可拆卸连接的保护壳体,所述保护壳体与船体之间设置有空腔,所述空腔内填充有淡化水,在所述保护壳体上还设置有若干利用高压气泵向空腔内打气后淡化水流出空腔以冲刷船体表面的出水孔,所述清理装置包括用于对保护壳体表面海生物进行清理、刮除的刮除组件,用于驱动刮除组件根据船头至船尾的船体外轮廓形状而进行升降使得刮除组件始终与保护壳体保持合适清理距离的升降组件,以及用于驱动刮除组件、升降组件同时沿船体的长度方向运行的运行组件,所述升降组件、运行组件均设置有两组,分别设置于船体两侧;还包括控制器,用于检测保护壳体外表面海生物附着厚度的厚度传感器,以及用于检测刮除组件距离保护壳体底部距离的距离传感器,所述厚度传感器检测到保护壳体外表面海生物附着厚度后发送检测信号至控制器,所述控制器接收检测信号后发送用于驱动运行组件沿船体长度方向运行的启动信号至运行组件,所述距离传感器检测到刮除组件距离包括壳体底部距离后发送检测信号至控制器,所述控制器根据计算得到合适清理距离后发送驱动升降组件升降距离的信号至升降组件;所述的船体表面海生物清理系统还包括用于检测水流大小的流速传感器,在高压气泵上连接有电磁阀,所述控制器接收到流
速传感器发送的检测信号后发送调节电磁阀开度大小的信号至电磁阀。
8.上述的船体表面海生物清理系统,所述冲刷装置还包括在空腔内沿船体周向设置有若干用于将高压气泵打出的气体均匀的泵入空腔使得淡化水均匀的从出水孔压出而进行船体表面冲刷的曝气口,所述曝气口通过曝气管道与高压气泵连接。
9.上述的船体表面海生物清理系统,所述刮除组件包括两个与升降组件固定连接的连接杆,以及设置于两个连接杆之间并与两个连接杆固定连接的底部支撑杆,在两个所述连接杆上设置有用于刮除保护壳体侧壁上附着的海生物的刮刀,在所述底部支撑杆上设置有用于对保护壳体外侧底壁进行辊压、清理海生物的清理辊,以及驱动清理辊转动的驱动机构,所述驱动机构包括设置于底部支撑杆上的驱动电机,与驱动电机输出轴固定连接的主动齿轮,设置于清理辊两端的轴承,以及设置于其中一轴承上与主动齿轮相啮合的从动齿轮。
10.上述的船体表面海生物清理系统,所述运行组件包括运行驱动电机,与运行驱动电机的输出轴连接的运行齿轮,以及沿船体长度方向色设置有与运行齿轮相啮合的齿条,在保护壳体上设置有运行凹槽,在所述运行凹槽内设置有与运行凹槽适配的滑块,在所述滑块上设置有与滑块固定连接的用于支撑运行驱动电机的支撑台,所述运行驱动电机固定于支撑台的底部,所述齿条通过承载台与保护壳体固定连接,所述齿条与承载台固定连接。
11.上述的船体表面海生物清理系统,所述升降组件包括防水保护外壳,与防水保护外壳固定连接的升降驱动电机,设置于防水保护外壳内的升降丝杠,设置于防水保护外壳内与所述升降驱动电机的输出端连接的主动升降驱动齿轮,以及在升降丝杠上端设置有的与主动升降驱动齿轮相啮合的从动升降驱动齿轮,在所述升降丝杠上设置有与升降丝杠螺纹连接的升降块,在升降块下端固定有升降套筒,在升降套筒的下端设置有与连接杆固定连接的固定套。
12.上述的船体表面海生物清理系统,所述清理系统还包括升降组件、刮除组件从船头运行至船尾后用于将升降组件、刮除组件旋转出水面并固定停留至船尾端部以便于船体停靠的旋转驱动组件。
13.上述的船体表面海生物清理系统,所述旋转驱动组件包括设置于支撑台上部的旋转驱动电机,与所述防水保护外壳固定连接的内齿圈,以及与所述旋转驱动电机的输出端固定连接的旋转齿轮,所述旋转齿轮设置于内齿圈内并与内齿圈相啮合设置,所述防水保护外壳通过设置于防水保护外壳上端的用于容纳内齿圈的通孔与内齿圈固定连接。
14.上述的船体表面海生物清理系统,所述防水保护外壳与承载台滑动连接设置,在防水保护外壳上固定有连接滑块,在承载台上设置有与连接滑块向配合的滑槽,所述船体表面海生物清理系统还包括用于采集升降组件沿船体长度方向运行时运行驱动电机正反转信号的正反转信号采集传感器。
15.上述的船体表面海生物清理系统,所述清理辊上周向设置有若干用于将保护壳体上附着的海生物进行清扫的毛刷。
16.本发明还提供一种船体表面海生物清理方法,包括如下步骤:
17.(1).将控制程序经控制面板输入并存储至信息存储器;
18.(2).启动控制面板上的旋转驱动组件旋转按钮,升降组件、刮除组件通过旋转驱动电机反转驱动将升降组件、刮除组件缓缓旋转至海水里;
19.(3).流速传感器检测到水流大小后,将检测信号发送给控制器,控制器接收检测信号后发送用于调节高压气泵曝气量大小的信号至电磁阀,此时,高压气泵一直处于曝气状态,可根据水流或者海浪大小来调节曝气量大小;
20.(4).当厚度传感器检测到保护壳体外表面海生物附着厚度后,将检测信号发送至控制器,控制器接收到检测信号后发送用于启动驱动运行组件沿船体长度方向运行的信号至运行组件,同时,距离传感器检测到刮除组件距离包括壳体底部距离后发送检测信号至控制器,控制器根据计算得到合适清理距离后发送驱动升降组件升降距离的信号至升降组件,开始对保护壳体上附着的海生物进行清理;
21.(5).当船体需要靠岸时,先启动控制面板上的旋转驱动组件旋转按钮,升降组件、刮除组件通过旋转驱动电机正转驱动将升降组件、刮除组件缓缓旋转出海水面并固定停留至船尾端部,然后启动控制面板上的停止按钮,控制器断电,厚度传感器、距离传感器、流速传感器信号采集停止,冲刷装置、清理装置停止工作;
22.(6).船体表面清理完成。
23.本发明船体表面海生物清理系统的有益效果是:本发明通过设置冲刷装置可以在附着之前先进行曝气,可实现防止污损过程的发生,可在正常航行期间进行作业,清除效率高。然后通过设置清理装置,可以对没有冲刷到的船体部位进行刮除清理,不会损坏船体部件。即将冲刷装置与清理装置相结合使用,大大提高了船体的清理效率。通过设置运行组件,升降组件,以及控制器,可使得刮除组件可以根据船头至船尾的船体外轮廓形状而进行升降使得刮除组件始终与保护壳体保持合适清理距离,使得刮除组件始终有效,无需清理工人定期下水清理,节省了人工清理成本。本发明提供的一种船体表面海生物清理方法,清理方法简单,操作便捷,节约能源,清理效果好。本发明可在航行的过程中进行清理,具有高效、省力、操作安全、适用范围广、制作方便、不会破坏船体的特点,同时可有效提高清理效率,值得被广泛推广应用。
附图说明
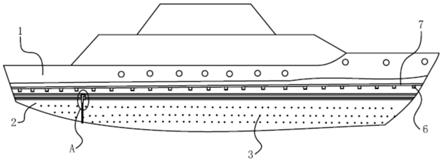
24.图1为本发明船体表面海生物清理系统结构示意图;
25.图2为a部放大结构示意图;
26.图3为本实施例中刮除组件结构示意图;
27.图4为本实施例中升降组件伸长状态结构示意图;
28.图5为本实施例中升降组件收缩状态结构示意图;
29.图6为本实施例中刮除组件、升降组件、旋转组件与船体上保护壳体连接结构示意图;
30.图7为b部的正视放大结构示意图;
31.图8为本发明的控制系统结构框图。
具体实施方式
32.下面结合附图及具体实施例对本发明做进一步详细说明;
33.实施例1
34.如图1-8所示,船体表面海生物清理系统,包括用于对船体1表面进行冲刷以防止
海生物附着于船体1表面的冲刷装置,以及用于对船体1表面冲刷后还附着有的海生物进行清理的清理装置,其中,冲刷装置包括将浸入海水中的船体1进行包覆后与船体1可拆卸连接的保护壳体2,保护壳体2与船体1之间设置有空腔,空腔内填充有淡化水,在保护壳体2上还设置有若干利用高压气泵(图中未示出)向空腔内打气后淡化水流出空腔以冲刷船体以及保护壳体2表面的出水孔3。本实施例中的清理装置包括用于对保护壳体2表面海生物进行清理、刮除的刮除组件4,用于驱动刮除组件4根据船头至船尾的船体1外轮廓形状而进行升降使得刮除组件4始终与保护壳体2保持合适清理距离的升降组件5,以及用于驱动刮除组件4、升降组件5同时沿船体1的长度方向运行的运行组件,升降组件4、运行组件5均设置有两组,分别设置于船体1两侧;还包括控制器,用于检测保护壳体2外表面海生物附着厚度的厚度传感器,以及用于检测刮除组件距离保护壳体2底部距离的距离传感器;厚度传感器检测到保护壳体2外表面海生物附着厚度后发送检测信号至控制器,控制器接收检测信号后发送用于驱动运行组件沿船体长度方向运行的启动信号至运行组件,距离传感器检测到刮除组件距离包括壳体底部距离后发送检测信号至控制器,控制器根据计算得到合适清理距离后发送驱动升降组件升降距离的信号至升降组件;船体表面海生物清理系统还包括用于检测水流大小的流速传感器,在高压气泵上连接有电磁阀,控制器接收到流速传感器发送的检测信号后发送调节电磁阀开度大小的信号至电磁阀。其中,将船体1与保护壳体2可拆卸固定连接的目的是为了在保养船体时,可将保护壳体2拆卸掉对船体表面进行保养养护。
35.在本实施例中,冲刷装置还包括在空腔内沿船体1周向设置有若干用于将高压气泵打出的气体均匀的泵入空腔使得淡化水均匀的从出水孔3压出而进行船体1表面冲刷的曝气口6,曝气口6通过曝气管道7与高压气泵连接。其中,曝气管道7可通过卡箍与船体固定连接,卡箍与船体固定的方式采用现有技术,此处不再赘述。为了将淡水池中的水顺利抽至空腔内,需要利用水泵,水泵与输送水管连接,在输送水管上设置有可以控制淡化水池内水输送至空腔内的水量的阀门,控制淡化水以一定流速持续向空腔内输送。
36.具体的,本实施例中的刮除组件包括两个与升降组件5固定连接的连接杆8,以及设置于两个连接杆8之间并与两个连接杆8固定连接的底部支撑杆9,在两个连接杆8上设置有用于刮除保护壳体2侧壁上附着的海生物的刮刀10,在底部支撑杆9上设置有用于对保护壳体2外侧底壁进行辊压、清理海生物的清理辊11,以及驱动清理辊11转动的驱动机构。其中,驱动机构包括设置于底部支撑杆9上的驱动电机12,与驱动电机12输出轴固定连接的主动齿轮13,设置于清理辊11两端的轴承14,以及设置于其中一轴承14上与主动齿轮13相啮合的从动齿轮15,清理辊11穿设于底部支撑杆9上。其中,刮刀10可以采用材料既能对海生物进行刮除,又不会损坏船体的保护壳体的材料,在本实施例中采用硬质橡胶刮刀。清理辊11上周向设置有若干用于将保护壳体2上附着海生物进行清扫的毛刷,可采用橡胶材质的毛刷。
37.为了实现刮除组件以及升降组件的自动运行目的,运行组件包括运行驱动电机16,与运行驱动电机16的输出轴连接的运行齿轮17,以及沿船体1长度方向色设置有与运行齿轮17相啮合的齿条18,在保护壳体2上设置有运行凹槽19,在运行凹槽19内设置有与运行凹槽19适配的滑块20,在滑块20上设置有与滑块20固定连接的用于支撑运行驱动电机16的支撑台21,运行驱动电机16固定与支撑台21的底部,齿条18通过承载台22与保护壳体2固定
连接,齿条18与承载台22固定连接。在本实施例中将齿条18与运行凹槽19平行设置,以保证正常运行。为了保证刮除组件以及升降组件的正常运行,在支撑台21底部设置有便于运行齿轮17转动的避让凹槽。
38.在本实施例中,升降组件包括防水保护外壳23,与防水保护外壳23固定连接的升降驱动电机24,设置于防水保护外壳23内的升降丝杠25,设置于防水保护外壳23内与升降驱动电机24的输出端连接的主动升降驱动齿轮26,以及在升降丝杠25上端设置有的与主动升降驱动齿轮26相啮合的从动升降驱动齿轮27,在升降丝杠25上设置有与升降丝杠25螺纹连接的升降块28,在升降块28下端固定有升降套筒29,在升降套筒29的下端设置有与连接杆8固定连接的固定套30。
39.为了便于船体停靠,在本实施例中,船体表面海生物清理系统还包括升降组件5、刮除组件4从船头运行至船尾后用于将升降组件5、刮除组件4旋转出水面并固定停留至船尾端部以便于船体1停靠的旋转驱动组件。进一步的,旋转驱动组件包括设置于支撑台21上部的旋转驱动电机31,与防水保护外壳23固定连接的内齿圈32,以及与旋转驱动电机31的输出端固定连接的旋转齿轮33,旋转齿轮33设置于内齿圈32内并与内齿圈32相啮合设置,防水保护外壳23通过设置于防水保护外壳23上端的用于容纳内齿圈32的通孔与内齿圈32固定连接。其中,旋转驱动电机31与支撑台21固定连接。
40.为了实现升降组件5、刮除组件4从船头运行至船尾后顺利将升降组件5、刮除组件4旋转出水面以及保证升降组件5固定稳定性,将防水保护外壳23与承载台22滑动连接设置。具体的,在防水保护外壳23上固定有连接滑块,在承载台22上设置有与连接滑块向配合的滑槽。本发明清理系统还包括用于采集升降组件沿船体长度方向运行时运行驱动电机正反转信号的正反转信号采集传感器,当时间传感器检测到运行时间后将检测信号发送至控制器,控制器接收到检测信号后发送用于控制运行驱动电机16正反转的信号至运行驱动电机16。
41.本发明还提供一种船体表面海生物清理方法,包括如下步骤:
42.(1).将控制程序经控制面板输入并存储至信息存储器;
43.(2).启动控制面板上的旋转驱动组件旋转按钮,升降组件、刮除组件通过旋转驱动电机反转驱动将升降组件、刮除组件缓缓旋转至海水里;
44.(3).流速传感器检测到水流大小后,将检测信号发送给控制器,控制器接收检测信号后发送用于调节高压气泵曝气量大小的信号至电磁阀,此时,高压气泵一直处于曝气状态,可根据水流或者海浪大小来调节曝气量大小;
45.(4).当厚度传感器检测到保护壳体外表面海生物附着厚度后,将检测信号发送至控制器,控制器接收到检测信号后发送用于启动驱动运行组件沿船体长度方向运行的信号至运行组件,同时,距离传感器检测到刮除组件距离包括壳体底部距离后发送检测信号至控制器,控制器根据计算得到合适清理距离后发送驱动升降组件升降距离的信号至升降组件,开始对保护壳体上附着的海生物进行清理;
46.(5).当船体需要靠岸时,先启动控制面板上的旋转驱动组件旋转按钮,升降组件、刮除组件通过旋转驱动电机正转驱动将升降组件、刮除组件缓缓旋转出海水面并固定停留至船尾端部,然后启动控制面板上的停止按钮,控制器断电,厚度传感器、距离传感器、流速传感器信号采集停止,冲刷装置、清理装置停止工作;
47.(6).船体表面清理完成。
48.上述实施例只是为了说明本发明的技术构思及特点,其目的是在于让本领域内的普通技术人员能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡是根据本发明内容的实质所做出的等效的变化或修改,都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1