无人垃圾处理船的制作方法
1.本实用新型涉及水面垃圾处理用具领域,具体是一种无人垃圾处理船。
背景技术:
2.随着人民生活水平的日益提高,旅游业的发展,以及人口的不断增长,由此带来的生活垃圾也日益增多,尤其是城市河面、旅游区湖面的浮游垃圾已成为一大公害,若不及时清除,则直接污染水源,其危害性大,直接影响工农业生产、水生动物的生长以及人类实用水源。
3.目前,我国针对湖泊的漂浮物的进行处理的方式是通过人工通过捞网进行漂浮物打捞和采用人工驾驶打捞船进行打捞。由于人工进行工作会受到气候以及湖泊水流的影响,从而不能够进行打捞作业,以致打捞效率低,而且传统用于的无人垃圾打捞漂流船经常会因为遮挡物而滞留。
技术实现要素:
4.本实用新型的目的在于提供无人垃圾处理船,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种无人垃圾处理船,包括船体;还包括安装在船体上的垃圾收集机构和防滞留机构,所述防滞留机构包括受撞杆、推杆、连杆、连接杆和铰接元件,所述受撞杆和推杆依次设置且均与船体滑动连接,所述受撞杆和推杆位于船体中的端部分别通过铰接元件与连接杆的端部铰接,所述连接杆靠近受撞杆的一端通过连杆与船体转动连接,所述受撞杆伸出船体的长度大于推杆伸出船体的长度。
7.作为本实用新型进一步的方案:所述受撞杆和推杆的端部均通过弹簧与船体连接。
8.作为本实用新型进一步的方案:所述垃圾收集机构包括打捞刮轮、转轴和开设有多个滤孔的支撑板,所述打捞刮轮设有多个且安装在船体底部开设的打捞槽中,多个所述打捞刮轮分别通过转轴与打捞槽转动连接且打捞刮轮分别位于打捞槽的外围,多个打捞刮轮之间设有支撑板,所述支撑板与打捞槽围成垃圾收集区,且支撑板与船体底部间隔设置。
9.作为本实用新型进一步的方案:所述支撑板的顶部设有挤水组件,所述挤水组件包括压板和液压缸,所述液压缸安装在打捞槽的内壁上且端部与压板连接。
10.作为本实用新型再进一步的方案:所述船体的底部设有浮板。
11.与现有技术相比,本实用新型的有益效果是:
12.本实用新型通过设置防滞留机构,能够在船体随水漂流的过程中,撞击到遮挡物时,通过反作用力的使船体远离该处,避免船体由与被挡住后而滞留,解决了传统用于的无人垃圾打捞漂流船经常会因为遮挡物而滞留的问题。
附图说明
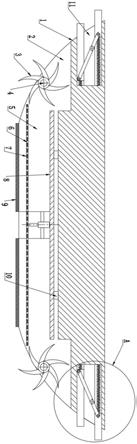
13.图1为本实用新型的结构示意图。
14.图2为本实用新型中打捞刮轮的结构示意图。
15.图3为图1中a处局部放大示意图。
16.附图标记注释:船体1、打捞槽2、打捞刮轮3、转轴4、垃圾收集区5、滤孔6、支撑板7、压板8、浮板9、液压缸10、防滞留机构11、弹簧12、铰接元件13、连接杆14、连杆15、受撞杆16、推杆17。
具体实施方式
17.以下实施例会结合附图对本实用新型进行详述,在附图或说明中,相似或相同的部分使用相同的标号,并且在实际应用中,各部件的形状、厚度或高度可扩大或缩小。本实用新型所列举的各实施例仅用以说明本实用新型,并非用以限制本实用新型的范围。对本实用新型所作的任何显而易知的修饰或变更都不脱离本实用新型的精神与范围。
18.请参阅图1和图3,在本实用新型的一种实施例中,一种无人垃圾处理船,包括船体 1;还包括安装在船体1上的垃圾收集机构和防滞留机构11,所述防滞留机构11包括受撞杆16、推杆17、连杆15、连接杆14和铰接元件13,所述受撞杆16和推杆17依次设置且均与船体1滑动连接,所述受撞杆16和推杆17位于船体1中的端部分别通过铰接元件 13与连接杆14的端部铰接,所述连接杆14靠近受撞杆16的一端通过连杆15与船体1转动连接,所述受撞杆16伸出船体1的长度大于推杆17伸出船体1的长度。
19.在本实施例中,所述船体1的底部设有浮板9。
20.工作原理:当受撞杆16撞到岸边、石头或湖内壁等地时,会挤压受撞杆16到船体1 中,此时受撞杆16的端部会带动连接杆14在连杆15上旋转,因为连杆15的位置将连接杆14分成两个长度不同的部分,所以连接杆14较长的一端会推动推杆17至船体1外部,且推到船体1外部的长度大于受撞杆16原本伸出船体1外部的量,所以推杆17伸出后会抵住受撞杆16原本的撞击物,使得船体1会远离该处,避免船体1由与被挡住后而滞留。
21.在本实施例中,所述受撞杆16和推杆17的端部均通过弹簧12与船体1连接,会由于弹簧12的弹力作用将受撞杆16和推杆17复位。
22.请参阅图1~2,在本实用新型的另一种实施例中,所述垃圾收集机构包括打捞刮轮3、转轴4和开设有多个滤孔6的支撑板7,所述打捞刮轮3设有多个且安装在船体1底部开设的打捞槽2中,多个所述打捞刮轮3分别通过转轴4与打捞槽2转动连接且打捞刮轮3 分别位于打捞槽2的外围,多个打捞刮轮3之间设有支撑板7,所述支撑板7与打捞槽2 围成垃圾收集区5,且支撑板7与船体1底部间隔设置。
23.作为优选的,所述支撑板7的顶部设有挤水组件,所述挤水组件包括压板8和液压缸 10,所述液压缸10安装在打捞槽2的内壁上且端部与压板8连接。
24.工作原理:在电机驱动转轴4转动的过程中会带动打捞刮轮3转动,从而打捞刮轮3 可以将水面上的垃圾刮到支撑板7上进行收集,通过开设的滤孔6进行滤水,避免过多的水压加重船体1的重量,还可以通过液压缸10驱动压板8将堆在支撑板7上的垃圾进行压缩,使得促进垃圾中的水排出。
25.本实用新型使用到的标准零件均可以从市场上购买,异形件根据说明书的和附图
的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓、铆钉、焊接等常规手段,机械、零件和设备均采用现有技术中,常规的型号,加上电路连接采用现有技术中常规的连接方式,在此不再详述。
26.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。
27.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
技术特征:
1.一种无人垃圾处理船,包括船体(1);其特征在于,还包括安装在船体(1)上的垃圾收集机构和防滞留机构(11),所述防滞留机构(11)包括受撞杆(16)、推杆(17)、连杆(15)、连接杆(14)和铰接元件(13),所述受撞杆(16)和推杆(17)依次设置且均与船体(1)滑动连接,所述受撞杆(16)和推杆(17)位于船体(1)中的端部分别通过铰接元件(13)与连接杆(14)的端部铰接,所述连接杆(14)靠近受撞杆(16)的一端通过连杆(15)与船体(1)转动连接,所述受撞杆(16)伸出船体(1)的长度大于推杆(17)伸出船体(1)的长度。2.根据权利要求1所述的无人垃圾处理船,其特征在于,所述受撞杆(16)和推杆(17)的端部均通过弹簧(12)与船体(1)连接。3.根据权利要求1所述的无人垃圾处理船,其特征在于,所述垃圾收集机构包括打捞刮轮(3)、转轴(4)和开设有多个滤孔(6)的支撑板(7),所述打捞刮轮(3)设有多个且安装在船体(1)底部开设的打捞槽(2)中,多个所述打捞刮轮(3)分别通过转轴(4)与打捞槽(2)转动连接且打捞刮轮(3)分别位于打捞槽(2)的外围,多个打捞刮轮(3)之间设有支撑板(7),所述支撑板(7)与打捞槽(2)围成垃圾收集区(5),且支撑板(7)与船体(1)底部间隔设置。4.根据权利要求3所述的无人垃圾处理船,其特征在于,所述支撑板(7)的顶部设有挤水组件,所述挤水组件包括压板(8)和液压缸(10),所述液压缸(10)安装在打捞槽(2)的内壁上且端部与压板(8)连接。5.根据权利要求1所述的无人垃圾处理船,其特征在于,所述船体(1)的底部设有浮板(9)。
技术总结
本实用新型公开了一种无人垃圾处理船,涉及水面垃圾处理用具领域;该处理船包括船体;还包括安装在船体上的垃圾收集机构和防滞留机构,所述防滞留机构包括受撞杆、推杆、连杆、连接杆和铰接元件,所述受撞杆和推杆依次设置且均与船体滑动连接,所述受撞杆和推杆位于船体中的端部分别通过铰接元件与连接杆的端部铰接,所述连接杆靠近受撞杆的一端通过连杆与船体转动连接,所述受撞杆伸出船体的长度大于推杆伸出船体的长度;本实用新型通过设置防滞留机构,能够在船体随水漂流的过程中,撞击到遮挡物时,通过反作用力的作用带动船体远离该处,避免船体由与被挡住后而滞留,解决了传统用于的无人垃圾打捞漂流船经常会因为遮挡物而滞留的问题。而滞留的问题。而滞留的问题。
技术研发人员:罗健 李娟
受保护的技术使用者:小虎鲸(武汉)智能科技有限公司
技术研发日:2021.01.27
技术公布日:2021/11/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1