一种水下智能机器人故障自救装置的制作方法
1.本实用新型涉及水下机器人领域,尤其涉及一种水下智能机器人故障自救装置。
背景技术:
2.水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。无人遥控潜水器主要有:有缆遥控潜水器和无缆遥控潜水器两种,其中有缆遥控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种。无论那种机器人其造价都十分昂贵,一旦在水下机器人出现故障时,机器人需要通过自救装置浮出水面,然后利用定位系统进行定位打捞。
3.现有的机器人自救装置多利用抛弃载重来进行水下机器人自救,如公开号cn109733569a提供的是一种水下机器人自救装置。包括耐水压的电子仓,设置于电子仓内的控制模块,安装在电子仓外的悬挂释放机构;悬挂释放机构的组成包括位于电子仓内部且穿过电子仓壁的一对吸引磁装置和一对排斥磁装置,电磁铁的与控制模块的电源相连,两根铰接在电子仓外的吸引杠,吸引杠的非铰接端设置有吸盘,吸盘的位置与吸引磁装置的位置相对,排斥磁装置外设置定深自救装置,定深自救装置上固定承重杆定位块,承重杆的一端固定在承重杆定位块上,吸引杠上有承重杆卡槽,电子仓外设置有自锁挡销。且还包括浮力球,浮力球具有向上的浮力,本发明承受载荷大、重量轻、体积小,安装简单,成本低,易于检测和控制,控制精度高,在预先确定的海洋深度里都能够适用和可行,这样通过抛弃载重的方式经济性差,不利于小型水下机器人故障自救使用。
4.因此,有必要提供一种新的水下智能机器人故障自救装置解决上述技术问题。
技术实现要素:
5.为解决上述技术问题,本实用新型提供一种可快速调整浮力,进行自救的水下智能机器人故障自救装置。
6.本实用新型提供的水下智能机器人故障自救装置包括:基板,所述基板下表面固定连接有四个连接杆,四个所述连接杆的底端固定连接有连接环,用于水下机器人故障自救的所述浮力组件安装于连接环上,用于控制调节浮力组件的气体释放组件安装于基板上并与浮力组件连通。
7.优选的,所述浮力组件包括耐压壳体、耐压气囊和连接管,四个所述耐压壳体焊接在连接环上并且相邻的两个耐压壳体首尾相连,且四个耐压壳体贯穿开设有进水孔,所述耐压气囊安装于耐压壳体的内腔中,且耐压气囊中部连通有连接管,所述连接管穿过耐压壳体侧壁与气体释放组件连通。
8.优选的,所述连接环的内侧壁上固定连接有环形气囊。
9.优选的,所述气体释放组件包括密封桶、储气瓶、插管、电磁阀、独立电源和控制器,所述密封桶固定安装于基板的下表面,且密封桶四周开设有通孔,所述连接管插设在通
孔中并密封连接,所述储气瓶固定安装于密封桶的内腔中,且储气瓶的出气口连接有插管,所述插管上安装有电磁阀,所述独立电源固定安装于密封桶内,且独立电源与电磁阀电性连接,所述控制器固定安装于密封桶内并与独立电源和电磁阀均电性连接。
10.优选的,所述控制器通过线缆与水下机器人主体电性连接。
11.优选的,所述基板呈镂空状,且基板的底端两侧固定安装有泡沫板。
12.优选的,所述基板上中间部位安装有闪烁灯,所述闪烁灯与独立电源电性连接,所述基板位于闪烁灯一侧固定连接有gps定位器,所述gps定位器与独立电源电性连接。
13.与相关技术相比较,本实用新型提供的水下智能机器人故障自救装置具有如下有益效果:
14.1、本实用新型提供一种水下智能机器人故障自救装置,通过设置浮力组件和气体释放组件,上水下智能机器人发生故障时,气体释放组件的控制器控制电源给电磁阀断电,电磁阀开启插管,储气瓶内的高压气体通过连接管输送至耐压气囊中,耐压气囊膨胀将耐压壳体的水排出,产生正浮力带动故障的机器人付出水面,整个自救装置结构简单,使用后更换储气瓶即可重新使用可以很好地满足水下智能机器人的故障自救;
15.2、通过设置泡沫板和环形气囊消除基板的连接环侧重力,便于承载重量大的机器人进行自救;
16.3、通过设置闪烁灯和gps定位器,便于在整个装置浮出水面后,进行快速定位和打捞。
附图说明
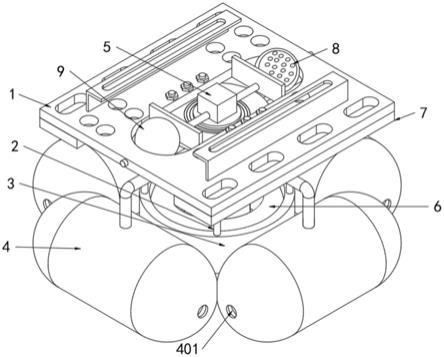
17.图1为本实用新型提供的水下智能机器人故障自救装置的一种较佳实施例的结构示意图;
18.图2为图1所示的浮力组件的结构示意图;
19.图3为图1所示的气体释放组件的结构示意图。
20.图中标号:1、基板;2、连接杆;3、连接环;4、浮力组件;401、进水孔;41、耐压壳体;42、耐压气囊;43、连接管;5、气体释放组件;51、密封桶;52、储气瓶;53、插管;54、电磁阀;55、独立电源;56、控制器;6、环形气囊;7、泡沫板;8、闪烁灯;9、gps定位器。
具体实施方式
21.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
22.以下结合具体实施例对本实用新型的具体实现进行详细描述。
23.请参阅图1至图3,本实用新型实施例提供的一种水下智能机器人故障自救装置,所述水下智能机器人故障自救装置包括:基板1、连接杆2、连接环3、浮力组件4和气体释放组件5.
24.基板1下表面固定连接有四个连接杆2,四个连接杆2的底端固定连接有连接环3,用于水下机器人故障自救的浮力组件4安装于连接环3上,用于控制调节浮力组件4的气体释放组件5安装于基板1上并与浮力组件4连通。
25.需要说明的是:使用时,将水下智能机器人安装在基板1,安装数量根据智能机器人的最大载重进行布置,这样在水下智能机器人水下作业发生故障时,通过控制气体释放组件5释放气体至浮力组件4内,浮力组件4产生正浮力将整个设备带动浮出水面,可快速调整浮力,进行自救。
26.在本实用新型的实施例中,请参阅图1和图2,浮力组件4包括耐压壳体41、耐压气囊42和连接管43,四个耐压壳体41焊接在连接环3上并且相邻的两个耐压壳体41首尾相连,且四个耐压壳体41贯穿开设有进水孔401,耐压气囊42安装于耐压壳体41的内腔中,且耐压气囊42中部连通有连接管43,连接管43穿过耐压壳体41侧壁与气体释放组件5连通。
27.需要说明的是:浮力组件4在未使用时,水下机器人在水下作业时,水通过进水孔401进入耐压壳体41的内部,使得水下机器人工能够进行正常的下潜,当水下智能机器人发生故障时,气体释放组件5开启,释放气体通过连接管43将气体压出耐压气囊42中,耐压气囊42快速鼓起,将耐压壳体41内的水排出,产生正浮力带动装置上浮,整个装置结构简单,且耐压气囊42在耐压壳体41的保护下使用更加安全。
28.而本在实施例中:耐压气囊42包括两端的圆弧部和中间的弹性部,两端的圆弧部外侧壁与耐压壳体41内侧壁滑动连接,耐压气囊42未充气时,在水压的作用下,两个圆弧部挤压靠近弹性部,当耐压气囊42充气时,弹性部鼓起推动两端的圆弧部将耐压壳体41内腔的水排出产生正浮力。
29.在本实用新型的实施例中,请参阅图1,连接环3的内侧壁上固定连接有环形气囊6。
30.需要说明的是:环形气囊6产生的浮力与连接环3的重力相等,减少连接环3的重力对水下智能机器人故障时自救的干扰。
31.在本实用新型的实施例中,请参阅图1、图2和图3,气体释放组件5包括密封桶51、储气瓶52、插管53、电磁阀54、独立电源55和控制器56,密封桶51固定安装于基板1的下表面,且密封桶51四周开设有通孔,连接管43插设在通孔中并密封连接,储气瓶52固定安装于密封桶51的内腔中,且储气瓶52的出气口连接有插管53,插管53上安装有电磁阀54,独立电源55固定安装于密封桶51内,且独立电源55与电磁阀54电性连接,控制器56固定安装于密封桶51内并与独立电源55和电磁阀54均电性连接。
32.需要说明的是:气体释放组件5使用时,当与水下智能机器人电线连接的控制器56检测到故障时,水下智能机器人不能进行移动上浮时。控制器56控制独立电源55对电磁阀54断电,断电后,电磁阀54开启,存储在储气瓶52内的高压气体通过插管53释放出,经过连接管43释放时浮力组件4内,浮力组件4产生正浮力用于水下智能机器人的自救。
33.而在本实施例中:电磁阀54为现有技术常用的常开式电磁阀,电磁阀54的进气端与插管53的出气端连通,独立电源55对电磁阀54供电时,电磁阀54关闭,断电时,电磁阀54开启,这样设置,防止独立电源55损坏时,气体释放组件5自动启动,自动释放气体进入浮力组件4内进行自救,此时无论水下机器人有无故障,都会自动浮出水面。
34.其中,控制器56通过线缆与水下机器人主体电性连接,控制器56为现有技术常用的控制元件可以使用plc逻辑控制器,通过线缆与水下智能无人机主机连接后,检测水下智能无人机主机的运行情况,并在水下智能无人机主机故障时将电磁阀54断。
35.在本实用新型的实施例中,请参阅图1,基板1呈镂空状,且基板1的底端两侧固定
安装有泡沫板7。
36.需要说明的是:基板1呈镂空状,最大程度减轻基板1的重量并设置泡沫板7,泡沫板7在水下长生的浮力可消除基板1的重力,且基板1设置用于与水下智能机器人连接的连接板,便于将整个装置安装在水下智能机器人上。
37.在本实用新型的实施例中,请参阅图1,基板1上中间部位安装有闪烁灯8,闪烁灯8与独立电源55电性连接,基板1位于闪烁灯8一侧固定连接有gps定位器9,gps定位器9与独立电源55电性连接。
38.需要说明的是:设置闪烁灯8,在浮力组件4带动发生故障的水下智能机器人浮出水面时,闪烁灯8启动进行闪光预警,便于在夜间搜寻故障的水下机器人,设置gps定位器9,gps定位器9为现有技术常用的防水gps可以利用北斗导航系统对gps定位器9进行定位,便于故障后进行快速定位寻找。
39.本实用新型提供的水下智能机器人故障自救装置的工作原理如下:使用时,将水下智能机器人安装在基板1,安装数量根据智能机器人的最大载重进行布置,当水下智能机器人水下作业发生故障时,与水下智能机器人电线连接的控制器56检测到故障,水下智能机器人不能进行移动上浮时,控制器56控制独立电源55对电磁阀54断电,断电后,电磁阀54开启,存储在储气瓶52内的高压气体通过插管53释放出,经过连接管43释放至耐压气囊42中,耐压气囊42快速鼓起,将耐压壳体41内的水排出,产生正浮力带动装置上浮,上浮后利用闪烁灯8,在浮力组件4带动发生故障的水下智能机器人浮出水面时,闪烁灯8启动进行闪光预警,便于在夜间搜寻故障的水下机器人,设置gps定位器9,gps定位器9为现有技术常用的防水gps可以利用北斗导航系统对gps定位器9进行定位,便于故障后进行快速定位寻找,整个装置结构简单,且耐压气囊42在耐压壳体41的保护下使用更加安全,使用后更换储气瓶52即可重新使用,具有很高的实用性。
40.本实用新型中涉及的电路以及控制均为现有技术,在此不进行过多赘述。
41.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1