一种仿生鱼摆动关节一体化驱动机构的制作方法
1.本实用新型涉及一种仿生鱼,具体是一种仿生鱼摆动关节一体化驱动机构。
背景技术:
2.鱼类,作为自然界最早出现的脊椎动物,经过亿万年的自然选择,进化出了非凡的水中运动能力,鱼类的游泳技巧远高于人类现有的航海科技。和普通的水下推进器相比,鱼类的游动具有推进效率高、机动性能好、隐蔽性能好等优点。仿生机器鱼作为鱼类推进机理和机器人技术的结合点,为研制新型的水下航行器提供了一种新思路,具有重要的研究价值和应用前景。一旦步入应用,仿生机器鱼将在复杂危险水下环境作业、军事侦察、水下救捞、海洋生物观察、考古等方面发挥重要作用。
3.现有的仿生鱼为了活动方便和更加逼真,需要将鱼尾做成多节,以方便仿生鱼模仿鱼摆动,但是多节鱼尾之间产生的缝隙较大,导致仿生鱼的鱼尾不够生动。因此,本实用新型提供一种仿生鱼摆动关节一体化驱动机构,以解决上述提出的问题。
技术实现要素:
4.本实用新型的目的在于提供一种仿生鱼摆动关节一体化驱动机构,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种仿生鱼摆动关节一体化驱动机构,包括鱼身、拆卸段和活动段,所述活动段设有若干个,活动段固定连接有垫板,相邻两个垫板设有密封硅胶带;
7.所述活动段和拆卸段均设有活动鳞。
8.作为本实用新型进一步的方案,所述鱼身与拆卸段卡接,鱼身固定连接有隔板。
9.作为本实用新型再进一步的方案,所述鱼身和拆卸段均设有固定鳞,鱼身和拆卸段均固定连接有固定块,固定块与固定鳞固定连接。
10.作为本实用新型再进一步的方案,所述活动鳞设有缺口,缺口固定连接有固定轴,固定轴转动连接有铰接块。
11.作为本实用新型再进一步的方案,所述鱼身内安装有控制装置,控制装置安装有摆动装置,所述活动段和拆卸段固定连接有固定板,固定板与摆动装置固定连接。
12.作为本实用新型再进一步的方案,所述鱼身设有鱼眼,鱼眼安装有摄像装置,末尾段的所述活动段设有鱼尾。
13.作为本实用新型再进一步的方案,所述拆卸段和活动段均固定连接有鱼鳍,相邻两个鱼鳍之间设有连接缝,所述鱼尾固定连接有硅胶飘带。
14.与现有技术相比,本实用新型的有益效果是:
15.1、通过密封硅胶带密封活动段和拆卸段的接缝处,从而隐藏仿生鱼的接缝,使仿生鱼游动时更加生动,同时活动鳞遮挡接缝和密封硅胶带,且仿生鱼在水中时,活动鳞随水来回摆动,模仿鱼收张鱼鳞,进一步使仿生鱼更加生动;
16.2、鱼鳍和硅胶飘带会随仿生鱼游动时摆动,提高仿生鱼的观赏性。
附图说明
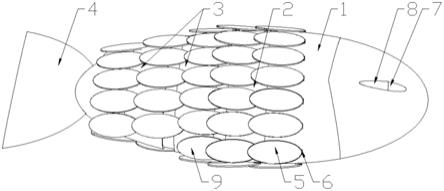
17.图1为一种仿生鱼摆动关节一体化驱动机构实施例1的结构示意图。
18.图2为一种仿生鱼摆动关节一体化驱动机构实施例1的剖视图。
19.图3为一种仿生鱼摆动关节一体化驱动机构实施例1中活动鳞与铰接块的连接图。
20.图4为一种仿生鱼摆动关节一体化驱动机构实施例2的结构示意图。
21.图中:1、鱼身;2、拆卸段;3、活动段;4、鱼尾;5、固定鳞;
22.6、固定块;7、鱼眼;8、摄像装置;9、活动鳞;10、缺口;
23.11、固定轴;12、铰接块;13、隔板;14、控制装置;15、摆动装置;
24.16、固定板;17、垫板;18、密封硅胶带;19、鱼鳍;20、连接缝;
25.21、硅胶飘带。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.实施例1:
28.请参阅图1~3,本实用新型实施例中,一种仿生鱼摆动关节一体化驱动机构,包括鱼身1、拆卸段2和活动段3,所述鱼身1与拆卸段2卡接,鱼身1固定连接有隔板13,活动段3设有若干个,活动段3固定连接有垫板17,相邻两个垫板17设有密封硅胶带18;
29.所述鱼身1和拆卸段2均设有固定鳞5,鱼身1和拆卸段2均固定连接有固定块6,固定块6与固定鳞5固定连接,所述活动段3和拆卸段2均设有活动鳞9,活动鳞9设有缺口10,缺口10固定连接有固定轴11,固定轴11转动连接有铰接块12;
30.所述鱼身1内安装有控制装置14,控制装置14安装有摆动装置15,所述活动段3和拆卸段2固定连接有固定板16,固定板16与摆动装置15固定连接,所述鱼身1设有鱼眼7,鱼眼7安装有摄像装置8,末尾段的所述活动段3设有鱼尾4。
31.本实用新型的工作原理是:
32.通过控制装置14控制摆动装置15,并通过摆动装置15、固定板16和活动段3配合,带动活动段3摆动,使仿生鱼游动,通过密封硅胶带18密封活动段3和拆卸段2的接缝处,从而隐藏仿生鱼的接缝,使仿生鱼游动时更加生动,同时活动鳞9遮挡接缝和密封硅胶带18,且仿生鱼在水中时,活动鳞9随水来回摆动,模仿鱼收张鱼鳞,进一步使仿生鱼更加生动。
33.实施例2:
34.请参阅图4,本实用新型实施例中,所述拆卸段2和活动段3均固定连接有鱼鳍19,相邻两个鱼鳍19之间设有连接缝20,所述鱼尾4固定连接有硅胶飘带21,鱼鳍19和硅胶飘带21会随仿生鱼游动时摆动,提高仿生鱼的观赏性。
35.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用
新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种仿生鱼摆动关节一体化驱动机构,包括鱼身(1)、拆卸段(2)和活动段(3),其特征在于,所述活动段(3)设有若干个,活动段(3)固定连接有垫板(17),相邻两个垫板(17)设有密封硅胶带(18);所述活动段(3)和拆卸段(2)均设有活动鳞(9)。2.根据权利要求1所述的一种仿生鱼摆动关节一体化驱动机构,其特征在于,所述鱼身(1)与拆卸段(2)卡接,鱼身(1)固定连接有隔板(13)。3.根据权利要求1所述的一种仿生鱼摆动关节一体化驱动机构,其特征在于,所述鱼身(1)和拆卸段(2)均设有固定鳞(5),鱼身(1)和拆卸段(2)均固定连接有固定块(6),固定块(6)与固定鳞(5)固定连接。4.根据权利要求1所述的一种仿生鱼摆动关节一体化驱动机构,其特征在于,所述活动鳞(9)设有缺口(10),缺口(10)固定连接有固定轴(11),固定轴(11)转动连接有铰接块(12)。5.根据权利要求1所述的一种仿生鱼摆动关节一体化驱动机构,其特征在于,所述鱼身(1)内安装有控制装置(14),控制装置(14)安装有摆动装置(15),所述活动段(3)和拆卸段(2)固定连接有固定板(16),固定板(16)与摆动装置(15)固定连接。6.根据权利要求1所述的一种仿生鱼摆动关节一体化驱动机构,其特征在于,所述鱼身(1)设有鱼眼(7),鱼眼(7)安装有摄像装置(8),末尾段的所述活动段(3)设有鱼尾(4)。7.根据权利要求6所述的一种仿生鱼摆动关节一体化驱动机构,其特征在于,所述拆卸段(2)和活动段(3)均固定连接有鱼鳍(19),相邻两个鱼鳍(19)之间设有连接缝(20),所述鱼尾(4)固定连接有硅胶飘带(21)。
技术总结
本实用新型公开了一种仿生鱼摆动关节一体化驱动机构,包括鱼身、拆卸段和活动段,所述活动段设有若干个,活动段固定连接有垫板,相邻两个垫板设有密封硅胶带;所述活动段和拆卸段均设有活动鳞。本实用新型使用时,通过密封硅胶带密封活动段和拆卸段的接缝处,从而隐藏仿生鱼的接缝,使仿生鱼游动时更加生动,同时活动鳞遮挡接缝和密封硅胶带,且仿生鱼在水中时,活动鳞随水来回摆动,模仿鱼收张鱼鳞,进一步使仿生鱼更加生动;鱼鳍和硅胶飘带会随仿生鱼游动时摆动,提高仿生鱼的观赏性。提高仿生鱼的观赏性。提高仿生鱼的观赏性。
技术研发人员:杨浩源
受保护的技术使用者:北京斯派得文化传播有限公司
技术研发日:2021.09.08
技术公布日:2022/3/29
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1