智能仿生鱼
1.本实用新型属于仿生机器鱼技术领域,具体涉及一种智能仿生鱼。
背景技术:
2.仿生机器鱼有着广泛的应用与发展空间,能代替潜水员在水中长时间工作,降低工作风险,且还可以检测水污染状况,监测鱼类生长和活动状况;目前的智能机器鱼主要由控制模块以及机械传动结构组成,通过设置在智能机器鱼中的机械传动部分,可使智能机器鱼的一些关节部位在水中实现运动,从而使得智能机器鱼能够在水中进行游动;
3.而现有的智能仿生鱼中的机械传动部分主要都是用来驱动机器鱼的背鳍,使背鳍进行转向从而来控制机器鱼的游动方位,但利用背鳍进行转向时会降低机器鱼的游动灵活性,不便于机器鱼运动协调,导致机器鱼在转向时很容易出现翻身的非正常运动状态。
技术实现要素:
4.基于上述背景技术中提到的问题,本实用新型提供了一种智能仿生鱼,用于解决现今的机器鱼利用背鳍进行转向时会降低机器鱼的游动灵活性,不便于机器鱼运动协调,导致机器鱼很容易出现翻身的技术问题。
5.本实用新型采用的技术方案如下:
6.一种智能仿生鱼,包括控制模块、固定板、头部板以及尾板,所述头部板位于所述固定板一端,所述头部板上开设有滑槽,所述固定板一端底面设置有卡接柱,所述固定板上的所述卡接柱卡在所述头部板上的所述滑槽内;所述固定板中部呈中空状,所述固定板中空处设置有安装板,所述安装板上设置有第二曲柄转动导杆机构,所述第二曲柄转动导杆机构一端与所述头部板连接;所述尾板位于所述固定板另一端且与所述第二曲柄转动导杆机构另一端连接;所述固定板上相对设置有两组固定块,两组所述固定块上均设置有第一曲柄转动导杆机构,两组所述第一曲柄转动导杆机构上均设置有摆动板;通过设置的固定板、头部板以及尾板可构成一个完整的鱼骨架,其中固定板作为鱼身,头部板作为鱼头,尾板作为鱼尾;通过将第二曲柄转动导杆机构设置在固定板中部的安装板上,使得第二曲柄转动导杆机构整体处在固定板上,而将头部板及尾板分别与第二曲柄转动导杆机构的两端进行连接,使得控制模块在控制第二曲柄转动导杆机构进行运动时,第二曲柄转动导杆机构可带动头部板与尾板进行摆动,从而使整个仿生鱼的鱼头与鱼尾可实现运动;通过在固定板上的两组固定块上均设置第一曲柄转动导杆机构,而两组第一曲柄转动导杆机构上均设置有摆动板,设置的两组摆动板能作为整个仿生鱼中的两个胸鳍,通过控制模块分别控制两组第一曲柄转动导杆机构进行运动,可使两组摆动板进行摆动,使得仿生鱼的两个胸鳍能实现运动,从而增强整个仿生鱼的灵活性。
7.在上述技术方案的基础上本实用新型还做了如下改进:
8.所述第一曲柄转动导杆机构包括舵机a与摆动杆,所述舵机a设置在所述固定块上,所述固定块底端设置有安装柱,所述摆动杆一端套在所述安装柱上;所述摆动杆上可滑
动的套设有滑套a,所述滑套a上铰接有拨动板a,所述拨动板a一端套设在所述舵机a转轴上;通过利用控制模块来控制舵机a进行转动,当舵机a转轴转动时,可带动转轴上的拨动板a进行转动,而拨动板a转动时则为整个机构中的曲柄,在拨动板a转动时可带动铰接在拨动板a一端的滑套a沿着摆动杆杆体进行移动,而滑套a沿着摆动杆杆体进行移动时,可使摆动杆一端绕着与固定块底端的安装柱的连接处进行转动,促使整个摆动杆实现摆动,从而使安装在摆动杆上的其他部件实现摆动。
9.进一步,所述摆动板套设在所述摆动杆一端头上,且所述摆动板呈船桨状,当摆动杆摆动时,可使安装在摆动杆一端头上的摆动板进行摆动,从而使仿生鱼的胸鳍可实现摆动。
10.进一步,所述第二曲柄转动导杆机构包括舵机b与连接杆,所述舵机b设置在所述安装板上,所述固定板一端顶面设置有铰接柱,所述连接杆上开设有定位孔,所述连接杆通过所述定位孔套设在所述铰接柱上;所述连接杆上可滑动的套设有滑套b,所述滑套b上铰接有拨动杆b,所述拨动杆b一端套设在所述舵机b转轴上;当通过利用控制模块来控制舵机b进行转动时,可带动舵机b转轴上的拨动板b进行转动,拨动板b在转动时则作为整个机构中的曲柄,在拨动板b转动时可带动设置在拨动板b一端的滑套b沿着连接杆的杆体进行移动,而滑套b沿着连接杆杆体移动时,可使连接杆绕着与铰接柱的连接处进行摆动,促使连接杆实现摆动运动。
11.进一步,所述头部板上设置有固定柱,所述连接杆一端套设在所述固定柱上,所述尾板铰接在所述连接杆另一端头上;通过将连接杆一端与头部板上的固定柱连接,使得在连接杆摆动时,可带动头部板绕着与固定板的连接处进行摆动,从而使得仿生鱼的头部进行摆动;而尾板铰接在连接杆另一端头上,使得在连接杆摆动时,也可带动尾板进行摆动,促使仿生鱼的尾巴也可实现摆动。
12.本实用新型的有益效果:
13.通过设置的固定板、头部板以及尾板组合可构成一个完整的鱼骨架,而固定板作为鱼身,头部板作为鱼头,尾板作为鱼尾,而通过在固定板中部的安装板上设置第二曲柄转动导杆机构,且将头部板及尾板分别与第二曲柄转动导杆机构两端进行连接,通过利用控制模块进行控制驱动第二曲柄转动导杆机构进行运动,当第二曲柄转动导杆机构运动时,可带动头部板及尾板进行摆动,从而使得仅利用一个机构则可控制仿生鱼的两个关节进行运动,能减少其他驱动件的使用,也可减轻整个仿生鱼的重量;而在固定板上的两组固定块上均设置第一曲柄转动导杆机构,两组第一曲柄转动导杆机构上均设置摆动板,设置的两组摆动板作为整个仿生鱼中的两个胸鳍,利用控制模块来分别控制两组第一曲柄转动导杆机构进行运动,使得两组摆动板进行摆动,促使仿生鱼的两个胸鳍能实现运动,最终促使整个仿生鱼的头部、尾巴以及两个胸鳍均能实现运动,使仿生鱼运动协调,以提高整个仿生鱼的游动灵活性。
附图说明
14.本实用新型可以通过附图给出的非限定性实施例进一步说明;
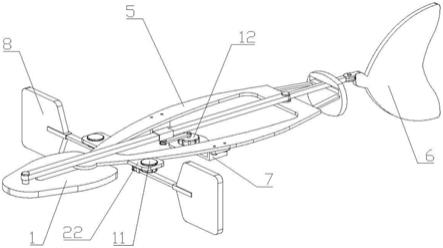
15.图1为本实用新型一种智能仿生鱼的立体图;
16.图2为本实用新型一种智能仿生鱼的爆炸图;
17.图3为本实用新型一种智能仿生鱼中的部分组件的结构图;
18.图4为本实用新型一种智能仿生鱼中的部分组件的爆炸图;
19.图5为本实用新型一种智能仿生鱼的结构图;
20.图6为图2中a区域的放大图。
21.主要元件符号说明如下:
22.1、头部板;2、固定柱;3、卡接柱;4、连接杆;5、固定板;6、尾板;7、安装板;8、摆动板;9、摆动杆;11、舵机a;12、舵机b;13、安装柱;14、滑套b;16、拨动杆b;17、铰接柱;18、定位孔;19、滑套a;20、拨动板a;21、滑槽;22、固定块。
具体实施方式
23.为了使本领域的技术人员可以更好地理解本实用新型,下面结合附图和实施例对本实用新型技术方案进一步说明。
24.如图1~图6所示,一种智能仿生鱼,包括控制模块、固定板5、头部板1以及尾板6,设置的固定板5、头部板1以及尾板6组合后可构成一个鱼骨架,固定板5作为鱼身部位,头部板1作为鱼头部位,尾板6作为鱼尾部位;
25.头部板1位于固定板5一端,且头部板1上开设有滑槽21,固定板5一端底面设置有卡接柱3,固定板5上的卡接柱3卡在头部板1上的滑槽21内,通过将头部板1上的滑槽21套在固定板5上的卡接柱3上,从而将头部板1与固定板5活动组装在一起,使得头部板1能沿着板上的滑槽21在卡接柱3上进行活动;
26.固定板5中部呈中空状,将固定板5中部设置为中空的,可减小固定板5的重量;且固定板5中空处设置有安装板7,安装板7上设置有第二曲柄转动导杆机构,第二曲柄转动导杆机构一端与头部板1连接;通过设置的第二曲柄转动导杆机构可驱动头部板1绕着与固定板5上的连接处进行摆动,使得仿生鱼的鱼头能实现摆动;而设置的第二曲柄转动导杆机构可利用控制模块进行控制其运动状态;
27.尾板6位于固定板5另一端且与第二曲柄转动导杆机构另一端连接;通过控制模块来控制第二曲柄转动导杆机构实现运动时,也可带动尾板6进行摆动,使得仿生鱼的尾巴能实现摆动;
28.其中,参阅图1、图2与图4,第二曲柄转动导杆机构包括舵机b12与连接杆4,舵机b12设置在安装板7上,设置的舵机b12可利用控制模块进行控制其运动状态,舵机b12则作为该机构中的动力源;
29.固定板5一端顶面设置有铰接柱17,连接杆4上开设有定位孔18,连接杆4通过定位孔18套设在铰接柱17上;通过将连接杆4上的定位孔18套在固定板5一端顶面的铰接柱17上,使得将连接杆4活动安装在固定板5上,促使连接杆4能绕着定位孔18与铰接柱17的连接处进行活动;
30.连接杆4上可滑动的套设有滑套b14,设置的滑套b14可在连接杆4上进行滑移;滑套b14上铰接有拨动杆b16,使得拨动杆b16活动安装在滑套b14上,促使拨动杆b16能绕着与滑套b14的铰接处进行转动;而拨动杆b16一端套设在舵机b12转轴上,将拨动杆b16一端与舵机b12转轴进行连接,使得舵机b12转轴在转动时,可带动拨动杆b16进行转动,使拨动杆b16作为该机构中的曲柄,当拨动杆b16转动时,即可带动拨动杆b16端头上的滑套b14沿着
连接杆4的杆体进行移动,当滑套b14在连接杆4的杆体上移动时,又可带动连接杆4绕着定位孔18与铰接柱17的连接处进行摆动,使得连接杆4能绕着铰接柱17实现摆动;
31.而头部板1上设置有固定柱2,连接杆4一端套设在固定柱2上,使得连接杆4的一端与头部板1进行连接,当连接杆4绕着铰接柱17进行摆动时,可使连接在连接杆4一端的头部板1绕着与固定板5上的卡接柱3处进行摆动,使得整个头部板1可实现摆动,促使仿生鱼的鱼头进行摆动运动;
32.尾板6铰接在连接杆4另一端头上,使得尾板6与连接杆4组装在一起,从而使得在连接杆4绕着铰接柱17进行摆动时,可带动尾板6进行摆动,促使仿生鱼的鱼尾进行摆动运动,从而实现利用一个机构可驱动仿生鱼的两个关节部位进行摆动,避免利用多个驱动源来驱动仿生鱼的关节运动,也可减轻仿生鱼的重量;
33.固定板5上相对设置有两组固定块22,两组固定块22上均设置有第一曲柄转动导杆机构,两组第一曲柄转动导杆机构上均设置有摆动板8;设置的两组摆动板8作为整个仿生鱼中的两个胸鳍,利用控制模块来分别控制两组第一曲柄转动导杆机构进行运动,使得两组摆动板8进行摆动,促使仿生鱼的两个胸鳍能实现运动;
34.其中,参阅图2与图6,第一曲柄转动导杆机构包括舵机a11与摆动杆9,舵机a11设置在固定块22上,设置的舵机a11通过控制模块进行控制,而舵机a11则作为该机构中的动力源;
35.固定块22底端设置有安装柱13,摆动杆9一端套在安装柱13上;使得摆动杆9能绕着安装柱13进行转动;摆动杆9上可滑动的套设有滑套a19,使得滑套a19可在摆动杆9上进行移动;
36.滑套a19上铰接有拨动板a20,使得拨动板a20可绕着与滑套a19的铰接处进行转动;拨动板a20一端套设在舵机a11转轴上,使得在舵机a11转轴转动时,可带动拨动板a20进行转动,使其形成曲柄,当拨动板a20转动时,即可带动拨动板a20端头上的滑套a19沿着摆动杆9杆体进行移动,当滑套a19在摆动杆9杆体上移动时,可带动摆动杆9绕着安装柱13处进行摆动,使得摆动杆9实现摆动;而摆动板8套设在摆动杆9一端头上,且摆动板8呈船桨状,当摆动杆9摆动时,即可带动摆动板8进行摆动,使得仿生鱼的胸鳍实现摆动,达到运动协调。
37.使用时,通过设置的固定板5作为仿生鱼的鱼身,头部板1以及尾板6分别作为鱼头与鱼尾,使其组成一个完整的鱼骨架;通过将头部板1上的滑槽21套在固定板5上的卡接柱3上,以将头部板1与固定板5活动组装在一起,而固定板5中空处的安装板7上设置有第二曲柄转动导杆机构,且第二曲柄转动导杆机构中的连接杆4一端套在头部板1上的固定柱2上,尾板6铰接在连接杆4另一端,使得将头部板1、尾板6与第二曲柄转动导杆机构中的连接杆4进行连接组装,当通过利用控制模块驱动第二曲柄转动导杆机构运作时,可使第二曲柄转动导杆机构中的舵机b12转轴进行转动,而舵机b12转轴转动时,可带动舵机b12转轴上的拨动杆b16进行转动,使拨动杆b16成为该机构中的曲柄,而拨动杆b16转动时,即可带动拨动杆b16端头上的滑套b14沿着连接杆4的杆体进行移动,而当滑套b14在连接杆4杆体上移动时,可使连接杆4绕着定位孔18与固定板5上的铰接柱17连接处进行摆动,促使连接杆4实现摆动,当连接杆4摆动时,可使连接在连接杆4一端的头部板1绕着与固定板5上的卡接柱3处进行摆动,促使仿生鱼的鱼头进行摆动,而连接在连接杆4另一端的尾板6也可实现摆动,使
仿生鱼的鱼尾也进行摆动,从而实现利用一个机构则可驱动仿生鱼的两个关节部位进行摆动,可减少仿生鱼中的动力源数量,也可减轻整个仿生鱼的重量;
38.而通过在固定板5上的两组固定块22上均设置第一曲柄转动导杆机构,且两组第一曲柄转动导杆机构中的摆动杆9上均设置摆动板8,设置的两组摆动板8可作为整个仿生鱼中的两个胸鳍,当利用控制模块来分别控制两组第一曲柄转动导杆机构进行运作时,可使第一曲柄转动导杆机构中的舵机a11转轴进行转动,而舵机a11转轴转动时,可带动拨动板a20进行转动,使其在该机构中形成曲柄,当拨动板a20转动时,能带动拨动板a20端头上的滑套a19沿着摆动杆9杆体进行移动,当滑套a19在摆动杆9杆体上移动时,即可带动摆动杆9绕着安装柱13处进行摆动,使得摆动杆9实现摆动,即可带动摆动板8进行摆动,促使仿生鱼的胸鳍实现摆动,当需要仿生鱼完成转身运动时,可控制两组摆动板8摆动的频率幅度,当其中一组摆动板8摆动频率幅度大于另一组摆动板8摆动频率幅度时,整个仿生鱼身体则可倾向于朝着摆动频率幅度大的一侧进行转动,从而实现转身运动;而尾板6的摆动则可在仿生鱼实现转身时起到平衡身体的作用,达到运动协调,避免仿生鱼出现翻身,以增强仿生鱼的游动灵活性。
39.以上对本实用新型进行了详细介绍。具体实施例的说明只是用于帮助理解本实用新型的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1