一种船舶触礁用平衡装置及自救应急处置系统的制作方法
1.本发明涉及船舶技术领域,具体为一种船舶触礁用平衡装置及自救应急处置系统。
背景技术:
2.随着人们生活质量的提升,越来越多的人选择出海游玩,经常会在一些不熟悉的航船环境中临时停靠,进行某些勘察或游玩,但在陌生的河边或海边停靠,会存在危险,靠河边区域可能河床陡升,船舶向岸边停靠时,会发生搁浅或撞击,造成危险,在靠海边区域可能会存在大量礁石,以致船体与礁石发生碰撞,或驶上礁石及其他坚硬物件并搁置在上面,进退困难,发生在短时间内难以脱险的情况。
3.一般船体在触礁或是搁浅时,只能依靠水手下水查看是否能够人力脱离礁石,而人力无法脱离时,很多人会选择盲目的通过船体推动桨强行使船体脱离礁石,造成船体受损,并且在船体触礁时,由于礁石形状不一,盲目移动时还会导致船体发生倾斜,甚至是发生翻船事件。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种船舶触礁用平衡装置,具备采用平衡系统和控制系统结合体位检测机构对船体进行平衡处理,在通过平衡推动机构和支撑推动机构配合悬挂机构和活动支撑组件使船首安全地脱离礁石等优点,解决了船体触礁时,不能安全脱离和触礁时导致船体倾斜甚至发生翻船事件的问题。
6.(二)技术方案
7.为解决上述的技术问题,本发明提供如下技术方案:一种船舶触礁用平衡装置,包括船体和控制系统,所述船体两侧设置有平衡系统,所述控制系统用于控制所述平衡系统,所述平衡系统包括平衡推动机构和支撑推动机构;所述平衡推动机构位于所述船体的船头位置,用于触礁时平衡船体;所述平衡推动机构包括推动组件,所述推动组件包括伸缩筒体,所述推动组件通过所述伸缩筒体与所述船体两侧连接;所述推动组件还包括清理组件,所述清理组件用于所述伸缩筒体内部的杂物;所述平衡系统还包括体位检测机构和悬挂机构;所述体位检测机构位于所述船体的前端中部,所述体位检测机构用于所述船体触礁时,对于船体体位进行检测;所述悬挂机构位于所述船体的尾部,所述悬挂机构用于所述船体触礁时,降低船体的重心;所述支撑推动机构位于所述船体的中部;所述船体的端部设置有活动支撑组件,用于触礁时撑起船体船头部分。
8.优选地,所述平衡推动机构与所述支撑推动机构均由多个独立设置的所述推动组件组成;每个所述推动组件分别采用独立动力,且均通过所述控制系统控制。
9.优选地,所述推动组件还包括螺旋桨,所述螺旋桨上方设置有安装轴套,所述安装轴套与所述伸缩筒体内壁固定连接,所述螺旋桨通过驱动轴与所述安装轴套连接,所述清
理组件分别设置在所述驱动轴两侧;所述安装轴套底部设置有隔水板,所述隔水板固定在所述伸缩筒体的内壁,所述伸缩筒体侧壁位于所述隔水板底部设置有疏水孔。
10.优选地,所述清理组件包括粉碎刀片,所述粉碎刀片通过辊轴与所述安装轴套连接,所述辊轴与所述驱动轴之间设置有传动齿轮组;所述清理组件还包括清理刮板,所述清理刮板设置在所述驱动轴另外两侧,所述清理刮板与所述驱动轴相紧贴设置,所述清理刮板上方与所述安装轴套固定连接。
11.优选地,所述体位检测机构包括固定底座,所述固定底座位于所述船体上开设的安装槽内部;所述固定底座上方设置有半球型凹槽,所述半球型凹槽上表面均匀设置有若干个接收器,所述固定底座正上方设置有红外线发射器,所述红外线发射器通过绳索悬挂与所述半球型凹槽上方,所述绳索另一端设置有圆球;所述安装槽上方设置有安装板,所述安装板下方设置有球形槽;所述圆球位于所述球形槽内部,且与所述球形槽转动连接。
12.优选地,所述悬挂机构包括悬重杆,所述悬重杆通过伸缩杆与所述船体尾部连接。
13.优选地,所述活动支撑组件包括支撑板,所述支撑板端部通过驱动杆与所述船体连接,所述驱动杆固定在所述船体端部,所述支撑板与所述船体贴合设置,所述驱动杆底部设置有支撑杆。
14.一种船舶自救应急处置系统,该系统包含了如上述权利要求1-7任一项所述的一种船舶触礁用平衡装置。
15.(三)有益效果
16.与现有技术相比,本发明提供了一种船舶触礁用平衡装置,具备以下有益效果:
17.1、该船舶触礁用平衡装置,通过悬挂在半球型凹槽上方的红外线发射器发射的红外线,配合接收器,当船体倾斜时,由于红外线发射器通过绳索悬挂,使得红外线发射器始终处于下垂状态,且始终垂于地心,进而船体倾斜时,红外线照射在半球型凹槽上表面的接收器上,当相对应位置的接收器接收到红外线信号后,配合控制系统,控制平衡系统使船体处于平衡状态。
18.2、该船舶触礁用平衡装置,通过平衡系统中的平衡推动机构中每个独立的推动组件,在体位检测机构对船体进行平衡处理,该处周围的推动组件分别以不同输出动力启动,使船体因不同倾斜方向受力大小不同,使船体更加平稳,其中该推动组件中伸缩筒体带动推动组件伸出于船体,并伸于水内,通过设置在伸缩筒体内部的螺旋桨,在驱动轴带动下进行转动,使并配合伸缩筒体对水进行推动,进而使船体端部受到向上的力,即船首与礁石之间摩擦力减小,方便船体脱离礁石。
19.3、该船舶触礁用平衡装置,通过伸缩筒体内部的清理组件在螺旋桨转动的同时,对其周围的杂物进行粉碎,防止水中藻类等杂物对推动组件造成损伤,其中驱动轴通过传动齿轮组带动辊轴转动,进而带动清理组件中的粉碎刀片进行转动,使粉碎刀片将伸缩筒体内的杂物进行粉碎。
20.4、该船舶触礁用平衡装置,通过船体中部支撑推动机构中的两个推动组件同时以相同功率启动,使得船体中部受到向上的力,进而使船体形成杠杆结构,同时利用位于船体尾部的悬重杆在伸缩杆的带动下,使悬重杆向船体尾部后方延伸,进而使船体的重心向后移动,并且在杠杆原理下,使船尾向下压,此时船首受到向上的力,进而使船首与礁石之间的摩擦力进一步降低,使船体更加容易脱离暗礁。
21.5、该船舶触礁用平衡装置,通过驱动杆带动支撑板向外转动,进而使得支撑杆抵住暗礁,将船体向后方推动,方便于船体离开暗礁,并且当船体驶向岸边时,无法使船体停止固定时,在船靠岸前,启动活动支撑组件,并在船靠岸后,放下活动支撑组件,使支撑杆下压在岸边,进而使船体相对固定,方便船体的临时停靠。
附图说明
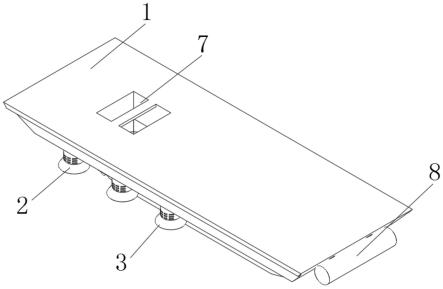
22.图1为本发明的整体立体结构示意图;
23.图2为本发明的船体左视平面结构示意图;
24.图3为本发明图2中a-a处的内部剖视平面结构示意图;
25.图4为本发明图2中b-b处的内部剖视平面结构示意图;
26.图5为本发明的推动组件内部剖视立体结构示意图;
27.图6为本发明的推动组件内部剖视爆炸结构示意图;
28.图7为本发明的体位检测机构内部剖视爆炸结构示意图。
29.图中:1、船体;11、安装槽;12、安装板;13、球形槽;2、平衡推动机构;3、支撑推动机构;4、推动组件;41、螺旋桨;42、安装轴套;43、驱动轴;5、伸缩筒体;51、隔水板;52、疏水孔;6、清理组件;61、粉碎刀片;62、辊轴;63、传动齿轮组;64、清理刮板;7、体位检测机构;71、固定底座;72、半球型凹槽;73、接收器;74、红外线发射器;75、绳索;76、圆球;8、悬挂机构;81、悬重杆;82、伸缩杆;9、活动支撑组件;91、支撑板;92、驱动杆;93、支撑杆。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.请参阅图1-7,一种船舶触礁用平衡装置,包括船体1和控制系统,船体1两侧设置有平衡系统,控制系统用于控制平衡系统,平衡系统包括平衡推动机构2和支撑推动机构3;平衡推动机构2位于船体1的船头位置,用于触礁时平衡船体1;平衡推动机构2包括推动组件4,推动组件4包括伸缩筒体5,推动组件4通过伸缩筒体5与船体1两侧连接;推动组件4还包括清理组件6,清理组件6用于清理伸缩筒体5内部的杂物;平衡系统还包括体位检测机构7和悬挂机构8;体位检测机构7位于船体1的前端中部,体位检测机构7用于船体1触礁时,对于船体1体位进行检测;悬挂机构8位于船体1的尾部,悬挂机构8用于船体1触礁时,降低船体1的重心;支撑推动机构3位于船体1的中部;船体1的端部设置有活动支撑组件9,用于触礁时撑起船体1船头部分。
32.进一步地,平衡推动机构2与支撑推动机构3均由多个独立设置的推动组件4组成;每个推动组件4分别采用独立动力,且均通过控制系统控制,利用平衡推动机构2中每个独立的推动组件4在控制系统的控制下,当船体1发生触礁搁浅时,体位检测机构7检测到船体1倾斜的角度后,控制系统控制相对应的平衡推动机构2中的推动组件4启动,使得该位置的船体1受到向上的力,进而使船体1相对平衡,利用位于船体1中部的支撑推动机构3,在启动后,使得船体1中部受到向上的力,进而使船体1形成杠杆结构。
33.进一步地,推动组件4还包括螺旋桨41,螺旋桨41上方设置有安装轴套42,安装轴套42与伸缩筒体5内壁固定连接,螺旋桨41通过驱动轴43与安装轴套42连接,清理组件6分别设置在驱动轴43两侧;安装轴套42底部设置有隔水板51,隔水板51固定在伸缩筒体5的内壁,伸缩筒体5侧壁位于隔水板51底部设置有疏水孔52,利用伸缩筒体5带动推动组件4伸出船体1,并伸于水内,通过设置在伸缩筒体5内部的螺旋桨41,在驱动轴43带动下进行转动,使并配合伸缩筒体5对水进行推动,进而使船体1体受到向上的力,其中伸缩筒体5设置的疏水孔52,在螺旋桨41将水向下推动时,伸缩筒体5外部的水能够从疏水孔52流回伸缩筒体5内,使得螺旋桨41始终能够推动水,产生向上的动力。
34.进一步地,清理组件6包括粉碎刀片61,粉碎刀片61通过辊轴62与安装轴套42连接,辊轴62与驱动轴43之间设置有传动齿轮组63;清理组件6还包括清理刮板64,清理刮板64设置在驱动轴43另外两侧,清理刮板64与驱动轴43相紧贴设置,清理刮板64上方与安装轴套42固定连接,利用驱动轴43通过传动齿轮组63带动辊轴62转动,进而带动清理组件6中的粉碎刀片61进行转动,使粉碎刀片61将伸缩筒体5内的杂物进行粉碎。
35.进一步地,体位检测机构7包括固定底座71,固定底座71位于船体1上开设的安装槽11内部;固定底座71上方设置有半球型凹槽72,半球型凹槽72上表面均匀设置有若干个接收器73,固定底座71正上方设置有红外线发射器74,红外线发射器74通过绳索75悬挂与半球型凹槽72上方,绳索75另一端设置有圆球76;安装槽11上方设置有安装板12,安装板12下方设置有球形槽13;圆球76位于球形槽13内部,且与球形槽13转动连接,利用悬挂在半球型凹槽72上方的红外线发射器74发射的红外线,配合接收器73,当船体1倾斜时,由于红外线发射器74通过绳索75悬挂,使得红外线发射器74始终处于下垂状态,且始终垂于地心,进而船体1倾斜时,红外线照射在半球型凹槽72上表面的接收器73上,当相对应位置的接收器73接收到红外线信号后,配合控制系统,控制平衡系统使船体趋于平衡状态。
36.进一步地,悬挂机构8包括悬重杆81,悬重杆81通过伸缩杆82与船体1尾部连接,利用悬重杆81在伸缩杆82的带动下,使悬重杆81向船体1尾部后方延伸,进而使船体1的重心向后移动,并且在杠杆原理下,使船尾向下压,此时船首受到向上的力,进而使船首更加容易脱离暗礁。
37.进一步地,活动支撑组件9包括支撑板91,支撑板91端部通过驱动杆92与船体1连接,驱动杆92固定在船体1端部,支撑板91与船体1贴合设置,驱动杆92底部设置有支撑杆93,利用驱动杆92带动支撑板91向外转动,进而使得支撑杆93抵住暗礁,将船体1向后方推动,方便于船体1离开暗礁,并且当船体1驶向岸边时,无法使船体1停止固定时,在船靠岸前,启动活动支撑组件9,并在船靠岸后,放下活动支撑组件9,使支撑杆93下压在岸边,进而使船体相对固定。
38.工作原理:在使用时,船体1正常在水域内行驶,当遇到船体1触礁时,控制系统开启平衡系统和体位检测机构7,对船体1进行平衡和脱离礁石,首先船体1触礁后,船体1倾斜,体位检测机构7对船体1倾斜方向进行检测判断,其中悬挂在半球型凹槽72上方的红外线发射器74发射的红外线,配合接收器73,当船体1倾斜时,由于红外线发射器74通过绳索75悬挂,使得红外线发射器74始终处于下垂状态,且始终垂于地心,进而船体1倾斜时,红外线照射在半球型凹槽72上表面的接收器73上,当相对应位置的接收器73接收到红外线信号后,配合控制系统,控制平衡系统使船体1处于平衡状态。
39.然后平衡系统中的平衡推动机构2中每个独立的推动组件4,在体位检测机构7对船体1进行平衡处理,该处周围的推动组件4分别以不同输出动力启动,使船体1因不同倾斜方向受力大小不同,使船体1更加平稳,其中该推动组件4中伸缩筒体5带动推动组件4伸出于船体1,并伸于水内,通过设置在伸缩筒体5内部的螺旋桨41,在驱动轴43带动下进行转动,使并配合伸缩筒体5对水进行推动,进而使船体1端部受到向上的力。
40.同时,伸缩筒体5内部的清理组件6在螺旋桨41转动的同时,对其周围的杂物进行粉碎,防止水中藻类等杂物对推动组件4造成损伤,其中驱动轴43通过传动齿轮组63带动辊轴62转动,进而带动清理组件6中的粉碎刀片61进行转动,使粉碎刀片61将伸缩筒体5内的杂物进行粉碎。
41.此时,船体1中部支撑推动机构3中的两个推动组件4同时以相同功率启动,使得船体1中部受到向上的力,进而使船体1形成杠杆结构,同时利用位于船体1尾部的悬重杆81在伸缩杆82的带动下,使悬重杆81向船体1尾部后方延伸,进而使船体1的重心向后移动,并且在杠杆原理下,使船尾向下压,此时船首受到向上的力,进而使船首更加容易脱离暗礁。
42.当船体1端部重力减轻,船首微微抬起时,启动活动支撑组件9,利用驱动杆92带动支撑板91向外转动,进而使得支撑杆93抵住暗礁,将船体1向后方推动,使船体1脱离礁石。
43.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1