一种AUV用自动升降旋转转运维修装置
一种auv用自动升降旋转转运维修装置
技术领域
1.本发明涉及水下机器人技术领域,尤其涉及一种auv用自动升降旋转转运维修装置。
背景技术:
2.auv在海洋资源勘查领域有着广泛应用,在母船甲板上的auv需要有专用的辅助保障维修装备进行高效支撑,以确保在作业航段内能够快速辅助auv进行维护、检修、搭载传感器、设备换装等,传统的辅助保障维修装备只是提供简易的支撑托架。在专利申请cn201910869242.7公开了一种auv用自动升降旋转转运维修装置,其虽实现了升降、旋转、及转运的功能,但可看出其中促使auv的旋转的结构为滚轮机构,对此,其存在以下不足:auv的重量较大,滚轮方式进行auv旋转可能存在力量不足,导致其无法进行旋转。
技术实现要素:
3.本发明提供一种auv用自动升降旋转转运维修装置,解决了auv旋转与转运的技术问题。
4.为解决上述技术问题,本发明提供的一种auv用自动升降旋转转运维修装置,包括机架,还包括:
5.支撑架,至少设置有两个,其中至少一个用于对auv的主体艉段进行支撑,至少一个用于对auv的主体中段进行支撑;
6.第一升降架,至少设置有两个,且其中至少一个设于对主体艉段和对主体中段分别进行支撑的两个支撑架之间;
7.旋转机构,滑动设于机架的一端,用于对auv的主体艏段进行固定后进行旋转,所述旋转机构包括可进行旋转的齿盘,所述齿盘采用圆环形,所述齿盘内连接有对所述主体艏段上的矩形绳托架进行固定的夹持固定组件;
8.第二升降架,滑动设于所述机架上、且靠近于所述旋转机构。
9.优选地,所述支撑架包括固接在所述机架上且相互平行的一对竖向柱和固接在所述一对竖向柱之间的v型支撑板。
10.优选地,所述第一升降架包括固接在所述机架上的第一底板、设于第一底板上方的第一升降支撑架、固接在第一底板上且与所述第一升降支撑架相连接的第一升降气缸;
11.所述第一升降支撑架包括与所述第一底板相平行的第一升降板、固定于第一升降板上的一对相互平行的第一竖向板、及固接在一对所述第一竖向板之间的第一弧形支撑板。
12.优选地,所述第二升降架包括通过第一滑动组件滑动连接在所述机架上的第二底板、设于第二底板上方的第二升降支撑架、固接在第二底板上且与所述第二升降支撑架相连接的第二升降气缸;
13.所述第二升降支撑架包括与所述第二底板相平行的第二升降板、固定于第二升降
板上的一对相互平行的第二竖向板、及固接在一对所述第二竖向板之间的第二弧形支撑板。
14.优选地,所述第一滑动组件包括固接在所述机架上且沿所述机架的一端向另一端延伸的第一滑轨、固接在所述第二底板上端面的连接块、以及与所述连接块相连接的伸缩气缸,所述底板滑动连接在所述第一滑轨上,所述伸缩气缸固接在机架上或固接于与所述第二升降架相靠近于的其中一个支撑架上。
15.优选地,所述旋转机构包括通过第二滑动组件滑动连接在所述机架上的滑动板、设于所述齿盘的两侧且与所述齿盘转动相接的两个圆环、使圆环固定于所述滑动板上的竖向连接柱、及用于使齿盘在两个圆环之间旋转的驱动组件,所述驱动组件固接在所述滑动板上。
16.优选地,第二滑动组件包括固接在所述机架上且沿所述机架的一端从另一端的方向设置的第二滑轨、固接在所述滑动板两侧且位于所述机架外侧的一对螺母座、设于所述机架外侧且相互平行的一对丝杆、固接于所述机架上的一双轴电机、与双轴电机的两个活动端相连接的驱动轴、及设于驱动轴的顶端上的锥齿轮一,所述一对丝杆的顶端上均连接有分别与两个所述锥齿轮一啮合的锥齿轮二,所述丝杆平行于所述第二滑轨。
17.优选地,所述驱动组件包括固接在所述滑动板上的旋转电机、连接在所述旋转电机上的旋转轴以及连接在所述旋转轴上的旋转齿轮,所述旋转齿轮与所述齿盘的外齿相啮合。
18.优选地,所述夹持固定组件包括固接在所述齿盘内圆面上且朝向齿盘的圆点方向延伸的夹持块,所述夹持块靠近于齿盘的圆点的一端开设有倒u型的凹槽,所述凹槽内设有嵌接在所述夹持块内的两个旋转夹持气缸,所述凹槽的底面为矩形状,所述两个旋转夹持气缸以矩形状的斜角中心线对称设置于所述凹槽的底面上。
19.优选地,所述齿盘内固接有对主体艏段两侧进行夹持的一对相对设置的固定组件,所述固定组件包括固接在所述齿盘的内圆面上的弧形连接块、连接在所述弧形连接块上的驱动气缸以及连接在所述驱动气缸上的夹持板,的一对所述固定组件上的夹持板相对设置,所述夹持旋转组件与一对固定组件在所述齿盘内呈三角形分布。
20.有益效果:
21.本发明通过支撑架和第二升降架在不需要旋转时对auv的主体艏段、主体艉段、及主体中段进行支撑,其中支撑架上的v型支撑板可避免auv的旋转;
22.在需要旋转时,本发明通过第一升降架和第二升降架对auv主体进行支撑,并通过旋转机构对主体艏段进行固定并以此进行旋转,其中第一升降架和第二升降架上设置的弧形支撑板可保证auv的旋转;
23.本发明中通过将第一升降架滑动设置于机架上,当不需要旋转时第一升降架移动至机架的一端对主体艏段进行支撑,在需要进行旋转时,第一升降架向主体中段移动,旋转机构移动至主体艏段处,通过夹持固定组件对主体艏段上的矩形绳托架进行固定,以保证齿盘与auv之间的连接;同时通过固定组件对auv进行夹持;以此保证齿盘在旋转时可带动auv的转动;
24.本发明通过齿盘、旋转齿轮及旋转电机的机械转动方式以保证auv旋转时所需的转动力。
附图说明
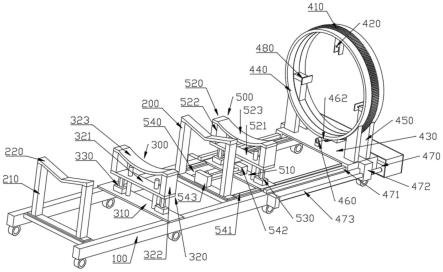
25.图1为本发明从机架一端观测的结构示意图;
26.图2为本发明从机架另一端观测的结构示意图;
27.图3为本发明中齿盘的结构示意图;
28.图4为本发明中夹持固定组件的结构示意图;
29.图5为本发明中的auv的简易示意图;
30.图中:
31.100-机架;
32.200-支撑架;210-竖向柱;220-v型支撑板;
33.300-第一升降架;310-第一底板;320-第一升降支撑架;321-第一升降板;322-第一竖向板;323-第一弧形支撑板;330-第一升降气缸;
34.400、旋转机构;410、齿盘;420、夹持固定组件;421-夹持块;422-凹槽;423-旋转夹持气缸;430-滑动板;440-圆环;450-竖向连接柱;460-驱动组件;461-旋转电机;462-旋转轴;463-旋转齿轮;470-第二滑动组件;471-第二滑轨;472-螺母座;473-丝杆;474-双轴电机;475-驱动轴;476-锥齿轮一;477-锥齿轮二;480-固定组件;481-弧形连接块;482-驱动气缸;483-夹持板;
35.500、第二升降架;510-第二底板;520-第二升降支撑架;521-第二升降板;522-第二竖向板;523-第二弧形支撑板;530-第二升降气缸;540-第一滑动组件;541-第一滑轨;542-连接块;543-伸缩气缸;
36.600、车轮;
37.700、auv;710、主体艏段;720、主体艉段;730、主体中段;740、矩形绳托架。
具体实施方式
38.如图1-4所示,本发明提供的一种auv用自动升降旋转转运维修装置,包括机架100,所述机架的底部安装有车轮600,用于对机架进行转运;其中,所述机架上连接有支撑架200、第一升降架300、旋转机构400、及第二升降架500,如图5所示,所述auv水下机器人700包括主体艏段710、主体艉段720、主体中段730及矩形绳托架740。
39.其中,如图1-图2所示,所述支撑架200至少设置有两个,至少两个支撑架沿所述机架的一端向另一端的方向并排间隔设置,其中,至少一个用于对auv的主体艉段720进行支撑,至少一个用于对auv的主体中段730进行支撑,如图1所示,所述支撑架包括固接在所述机架上且相互平行的一对竖向柱210和固接在所述一对竖向柱之间的v型支撑板220,所述支撑架用于在auv不需要进行旋转时对主体艉段和主体中段进行支撑,其中,v型支撑板可保证auv不发生转动。
40.其中,如图1-图2所示,所述第一升降架(300)至少设置有两个,且其中至少有一个设于对主体艉段和对主体中段分别进行支撑的两个支撑架之间,当需要进行旋转,该第一升降架可发生升降运动并对主体艉段和主体中段之间进行支撑;所述第一升降架包括固接在所述机架上的第一底板310、设于第一底板上方的第一升降支撑架320、固接在第一底板上且与所述第一升降支撑架相连接的第一升降气缸330;其中,所述第一升降支撑架包括与所述第一底板相平行的第一升降板321、固定于第一升降板上的一对相互平行的第一竖向
板322、及固接在一对所述第一竖向板之间的第一弧形支撑板323。由此,当需要旋转,所述第一升降气缸促使第一升降板带动第一弧形支撑板向上移动并与auv接触,并继续向上移动,促使auv与支撑架脱离接触,其中的第一弧形支撑板的弧面可保证auv在主体艉段的转动。
41.其中,如图1和图2所示,所述第二升降架500滑动设于所述机架上、且靠近于所述旋转机构,所述第二升降架包括通过第一滑动组件540滑动连接在所述机架上的第二底板510、设于第二底板上方的第二升降支撑架520、固接在第二底板上且与所述第二升降支撑架相连接的第二升降气缸530;其中,所述第二升降支撑架包括与所述第二底板相平行的第二升降板521、固定于第二升降板上的一对相互平行的第二竖向板522、及固接在一对所述第二竖向板之间的第二弧形支撑板523;其中,所述第一滑动组件包括固接在所述机架上且沿所述机架的一端向另一端延伸的第一滑轨541、固接在所述第二底板上端面的连接块542、以及与所述连接块相连接的伸缩气缸543,所述底板滑动连接在所述第一滑轨上,所述伸缩气缸固接在机架上或固接于与所述第二升降架相靠近于的其中一个支撑架上。由此,当不需要进行旋转时,所述第二升降架移动至机架的一端且与所述旋转机构400靠近,同时第二弧形支撑板上升与auv接触的位置,此时第二升降架用于在不需要旋转时对主体艏段710进行支撑,当需要进行旋转时,第二升降气缸促使第二弧形支撑板下降,再通过伸缩气缸促使第二升降支撑架移动至靠近于主体中段的位置,且此时第二升降气缸与第一升降气缸同步启动,分别对第一弧形支撑板和第二弧形支撑板向上移动,分别对主体中段的两侧进行支撑,并同时使auv与支撑架脱离接触。
42.其中,如图1和图2所示,所述旋转机构400,滑动设于机架的一端,在需要旋转时,用于对auv的主体艏段进行固定后进行旋转;
43.其中,所述旋转机构包括可进行旋转的齿盘410,且所述齿盘采用圆环形,所述齿盘内连接有对所述主体艏段上的矩形绳托架进行固定的夹持固定组件420;
44.其中,所述旋转机构包括通过第二滑动组件470滑动连接在所述机架上的滑动板430、设于所述齿盘的两侧且与所述齿盘转动相接的两个圆环440、使圆环固定于所述滑动板上的竖向连接柱450、及用于使齿盘在两个圆环之间旋转的驱动组件460,所述驱动组件固接在所述滑动板上。由此,通过第二滑动组件促使滑动板、圆环、齿盘在机架上进行移动,通过圆环将齿盘设置于滑动板上,齿盘的两侧延伸有圆环凸块,所述圆环上对应设置圆环凹槽,如此将齿盘转动设于两个圆环之间,齿盘的结构图即图3所示。
45.在上述中,所述第二滑动组件包括固接在所述机架上且沿所述机架的一端从另一端的方向设置的第二滑轨471、固接在所述滑动板两侧且位于所述机架外侧的一对螺母座472、设于所述机架外侧且相互平行的一对丝杆473、固接于所述机架上的一双轴电机474、与双轴电机的两个活动端相连接的驱动轴475、及设于驱动轴的顶端上的锥齿轮一476,所述一对丝杆的顶端上均连接有分别与两个所述锥齿轮一啮合的锥齿轮二477,所述丝杆平行于所述第二滑轨。由此,双轴电机通过驱动轴促使两个锥齿轮一转动,带动锥齿轮二转动,锥齿轮二的转动促使丝杆的转动,进而带动螺母座沿丝杆的移动,由此即可实现滑动板的移动。
46.在上述中,所述驱动组件包括固接在所述滑动板上的旋转电机461、连接在所述旋转电机上的旋转轴462以及连接在所述旋转轴上的旋转齿轮463,所述旋转齿轮与所述齿盘
的外齿相啮合。由此,旋转电机通过旋转轴促使旋转齿轮的转动,旋转齿轮即带动齿盘的转动。
47.如图2和图4所示,所述夹持固定组件包括固接在所述齿盘内圆面上且朝向齿盘的圆点方向延伸的一夹持块421,所述夹持块靠近于齿盘的圆点的一端开设有倒u型的凹槽422,在所述凹槽内设有嵌接在所述夹持块内的两个旋转夹持气缸423,所述凹槽的底面为矩形状,所述两个旋转夹持气缸以矩形状的斜角中心线对称设置于所述凹槽的底面上。夹持块的结构设计,可在齿盘从机架的一端沿主体艏段向主体中段进行移动时,所述夹持块的凹槽位于所述矩形绳托架的两侧,当两个旋转夹持气缸移动所述矩形绳托架的两侧时,停止齿盘的移动,此时矩形绳托架的上端横杆靠近于凹槽的底面,其中一个旋转夹持气缸的活动端平行于矩形绳托架的上端横杆,那么旋转夹持气缸旋转后从上端横杆的下方旋转90
°
,再向上回缩,即可对上端横杆进行压紧;完成后另一个旋转夹持气缸再进行旋转和回缩,如此两个斜向对称的旋转夹持气缸即可对上端横杆的两端进行压紧,实现对矩形绳托架的固定。
48.其中,在所述齿盘内固接有对主体艏段两侧进行夹持的一对相对设置的固定组件480,所述固定组件包括固接在所述齿盘的内圆面上的弧形连接块481、连接在所述弧形连接块上的驱动气缸482以及连接在所述驱动气缸上的夹持板483,的一对所述固定组件上的夹持板相对设置,所述夹持旋转组件与一对固定组件在所述齿盘内呈三角形分布。如此,所述夹持旋转组件和固定组件完成对主体艏段的固定,以此保证对auv的旋转。
49.需要说明的是,在本发明中所述旋转机构上可按照红外线感应装置,对位于支撑架上的auv的矩形绳托架的位置感应,以调整夹持固定组件在齿盘的角度,保证矩形绳托架位于凹槽的中心位置。且进一步地,本发明中的夹持块可通过一伸缩气缸连接在齿盘上,如此可适于不同尺寸大小的auv。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1