一种全海深单相驱动压电释放机构及其工作方式
1.本发明涉及压电驱动和深海探测装备领域,尤其涉及一种全海深单相驱动压电释放机构及其工作方式。
背景技术:
2.水声遥控是水声通信的一种应用,是利用水声通信的方式传递控制命令。声学释放器是水声遥控系统的一种装备,是由水面甲板单元和水下声学释放单元两部分构成。水面甲板单元实现对水下声学释放单元的控制和状态监测;水下声学释放单元用于实现水下潜标系统的回收,同时保证释放系统的可靠性和负载能力。
3.声学释放器应该适应深海高水压、强腐蚀和低温等恶劣环境,在未接收释放指令时能够可靠锁止,在接收释放指令后能够立即释放。目前,按照驱动源的种类,深海释放器的执行机构释放方式包括电磁电机驱动式、气动式、熔断式和电磁式。与上述驱动源不同,压电作动器是利用压电陶瓷激励定子产生的可控微观振动,通过定子和转子和摩擦实现转子的宏观运动。压电作动器结构简单,在空间内可自由布置,具有较高的转矩重量比;当压电作动器用于水下设备时,其开放式结构和海水之间不存在压差,只需要对暴露在水中的压电陶瓷片和其镀银层涂覆胶水即可完成绝缘处理;压电作动器的定、动子接触界面允许海水接触,海水的对流可以有效降低高频振动下因结构阻尼和摩擦带来的温升问题,消除因温升造成的压电作动器工作频率漂移,输出性能下降等问题;响应快、自锁定等优势可以更好的适应潜航器所在的深海环境,避免因水下扰动造成挂载的脱落,可以显著提高抛载系统的可靠性。
技术实现要素:
[0004][0005]
本发明所要解决的技术问题是针对背景技术中所涉及到的缺陷,提供一种全海深单相驱动压电释放机构及其工作方式。
[0006]
本发明为解决上述技术问题采用以下技术方案:
[0007]
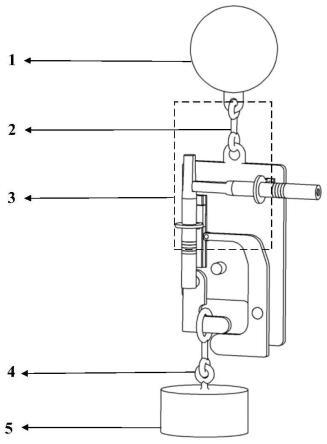
一种全海深单相驱动压电释放机构,包括浮体、探测器、释放模块、第一至第二连接装置以及锚定重物;
[0008]
所述浮体用于提供上浮浮力;
[0009]
所述探测器用于探测、监测海洋,布置在浮体内;
[0010]
所述释放模块包含释放锁体、第一压电作动器和第二压电作动器;
[0011]
所述释放锁体包含固定板、挂板、限位板、第一转动柱和第二转动柱;
[0012]
所述固定板上端设有用于铰接的连接环;
[0013]
所述挂板为l形板,包含相会垂直固连的转动条和承重条,所述转动条的下端和所述承重条的一端垂直固连,所述承重条用于悬挂所述锚定重物;
[0014]
所述限位板为u形板,包含第一限位条、第二限位条和连接条,所述连接条的一端
分别和所述第一限位条、第二限位条的一端垂直固连;所述第一限位条的长度大于第二限位条的长度,且第一限位条远离连接条的一端设有滑轮;
[0015]
所述第一转动柱、第二转动柱均和所述固定板垂直固连;所述转动条上端和所述第一转动柱转动相连,使得所述挂板平行于所述固定板且能够绕所述第一转动柱自由转动;所述连接条和所述第二转动柱转动相连,使得所述限位板平行于所述固定板且能够绕所述第二转动柱自由转动;所述挂板、限位板的开口相向;
[0016]
所述固定板在所述第一转动柱上方设有竖直的滑轨,且滑轨内设有滑块;当所述限位板第一限位条端部的滑轮抵住所述滑块时,限位板第二限位条抵住所述挂板承重条的下端,使得承重条水平进而使得承重条无法脱离悬挂在其上的锚定重物;当所述滑块沿着滑轨向上滑动使得限位板第一限位条端部的滑轮和所述滑块脱离时,限位板不起限定作用,在浮体向上的拉力以及锚定重物朝下的拉力作用下,承重条旋转倾斜带动限位板绕第二转动柱转动,使得释放锁体脱离锚定重物;
[0017]
所述第一压电作动器、第二压电作动器结构相同,均包括压电复合梁、法兰和作动头,其中,所述作动头为横截面从后往前逐渐变细的柱体,其前端侧壁两侧设有相互平行的驱动面;所述作动头后端端面和所述压电复合梁前端的端面形状相同,且作动头后端端面和所述压电复合梁前端端面同轴固连;所述压电复合梁用于驱动所述作动头;所述法兰用于固定所述压电复合梁;
[0018]
所述第一压电作动器通过其法兰固定在所述滑块上,和所述滑轨平行;所述第二压电作动器通过其法兰固定在所述固定板上,和所述第一压电作动器相互垂直,且第二压电作动器作动头的前端抵在第一压电作动器作动头的一个驱动面上;
[0019]
所述第一压电作动器、第二压电作动器用于相互配合以控制所述滑块在滑轨上滑动;
[0020]
所述第一、第二连接装置均包含杆体和铰接环,其中,所述铰接环呈圆环状;所述杆体一端和铰接环的外壁固连且杆体指向铰接环的圆心;
[0021]
所述第一连接装置杆体远离其铰接环的一端和所述浮体下端铰接,第一连接装置的铰接环和所述固定板的连接环铰接;
[0022]
所述第二连接装置的铰接环套在所述挂板的承重条上,第二连接装置杆体远离其铰接环的一端和锚定重物铰接;
[0023]
所述锚定重物用于提供竖直向下的重力,起锚定作用,防止压电释放系统因水流扰动或海水温度梯度的影响使得锚定位置发生移动。
[0024]
作为本发明一种全海深单相驱动压电释放机构进一步的优化方案,所述固定板在所述挂板和限位板之间还设有和固定板垂直固连的限位柱,用于限制所述限位板的转动程度。
[0025]
作为本发明一种全海深单相驱动压电释放机构进一步的优化方案,所述压电复合梁包含预紧螺栓、后梁体、压电陶瓷模块和前梁体;
[0026]
所述预紧螺栓包含螺帽和螺柱;所述前梁体、后梁体为横截面形状相同的正棱柱或圆柱体,前梁体一个端面的中心设有和所示预紧螺栓相匹配的螺纹孔,后梁体一个端面的中心设有和所述预紧螺栓相匹配的沉头通孔;
[0027]
所述压电陶瓷模块包含2m个单分区压电陶瓷片和2m+1个电极片,m为大于等于1的
自然数;所述单分区压电陶瓷片呈正多边形或圆形,中心设有供预紧螺栓穿过的通孔,沿着厚度方向极化;所述电极片的形状和所述单分区压电陶瓷片相同;所述2m+1个电极片和2m个单分区压电陶瓷片依次交替层叠,使得2m+1个电极片和2m个单分区压电陶瓷片同轴且相邻单分区压电陶瓷片之间有电极片分隔;相邻单分区压电陶瓷片的极化方向相反;
[0028]
所述预紧螺栓的螺柱依次穿过所述后梁体的沉头通孔、压电陶瓷模块中2m个单分区压电陶瓷片和2m+1个电极片中心的通孔后和前梁体的螺纹孔螺纹相连,将2m个单分区压电陶瓷片和2m+1个电极片压紧;
[0029]
我们令此种方案为双分区夹心式方案。
[0030]
作为本发明一种全海深单相驱动压电释放机构进一步的优化方案,所述压电复合梁包含预紧螺栓、后梁体、压电陶瓷模块和前梁体;
[0031]
所述预紧螺栓包含螺帽和螺柱;所述前梁体、后梁体为横截面形状相同的正棱柱或圆柱体,前梁体一个端面的中心设有和所示预紧螺栓相匹配的螺纹孔,后梁体一个端面的中心设有和所述预紧螺栓相匹配的沉头通孔;
[0032]
所述压电陶瓷模块包含2m个双分区压电陶瓷片和2m+1个电极片,m为大于等于1的自然数;所述双分区压电陶瓷片呈正多边形或圆形,中心设有供预紧螺栓穿过的通孔,沿着厚度方向极化,双分区压电陶瓷片的极化分界线为直线,且双分区压电陶瓷片两个分区的极化方向相反;所述电极片的形状和所述双分区压电陶瓷片相同;所述2m+1个电极片和2m个双分区压电陶瓷片依次交替层叠,使得2m+1个电极片和2m个双分区压电陶瓷片同轴,2m个双分区压电陶瓷片的极化分界线共面,且相邻双分区压电陶瓷片之间有电极片分隔;相邻双分区压电陶瓷片的极化方向相反;
[0033]
所述预紧螺栓的螺柱依次穿过所述后梁体的沉头通孔、压电陶瓷模块中2m个双分区压电陶瓷片和2m+1个电极片中心的通孔后和前梁体的螺纹孔螺纹相连,将2m个双分区压电陶瓷片和2m+1个电极片压紧;
[0034]
我们令此种方案为单分区夹心式方案。
[0035]
作为本发明一种全海深单相驱动压电释放机构进一步的优化方案,所述压电复合梁包含梁体、第一压电陶瓷片和第二压电陶瓷片,其中,所述梁体为柱体;所述第一、第二压电陶瓷片均沿厚度方向极化,对称地粘贴在梁体的侧壁两侧;
[0036]
我们令此种方案为贴片式方案。
[0037]
本发明还公开了一种该全海深单相驱动压电释放机构采用单分区夹心式方案或贴片式方案时的工作方法,包含以下步骤:
[0038]
锁定时,第一压电作动器、第二压电作动器的作动头之间产生的静摩擦力阻止滑块在滑轨上滑动,限位板第一限位条端部的滑轮抵住所述滑块,限位板第二限位条抵住所述挂板承重条的下端,使得承重条水平进而使得承重条无法脱离悬挂在其上的锚定重物;
[0039]
进行释放时:
[0040]
分别采用时间相位相差90度的交流电信号ac-a、ac-b激励第一、第二压电作动器,使得第一压电作动器的纵振模态和第二夹心式纵振的纵振模态被同时激发,第一压电作动器的驱动面和第二压电作动器作动头的前端端点产生椭圆运动,使得第一压电作动器带动滑块朝着靠近浮体的方向移动,具体周期过程如下:
[0041]
过程a:在0-t/4时间段,第一压电作动器由收缩状态向平衡状态转变,其上各点朝
远离节点位置运动;第二压电作动器由平衡状态向收缩状态转变,其上各点朝靠近节点位置运动;
[0042]
过程b:在t/4-2t/4时间段,第一压电作动器由平衡状态向扩张状态转变,其上各点朝远离节点位置运动;第二压电作动器由收缩状态向平衡状态转变,其上各点朝远离节点位置运动;
[0043]
过程c:在2t/4-3t/4时间段,第一压电作动器由扩张状态向平衡状态转变,其上各点朝靠近节点位置运动;第二压电作动器由平衡状态向扩张状态转变,其上各点朝远离节点位置运动;
[0044]
过程d:在3t/4-t时间段,第一压电作动器由平衡状态向收缩状态转变,其上各点朝靠近节点位置运动;第二压电作动器由扩张状态向平衡状态转变,其上各点朝靠近节点位置运动;
[0045]
过程a中,第二压电作动器的向内收缩,第二压电作动器作动头的前端和第一压电作动器作动头的驱动面有脱离的趋势,由于第二压电作动器受到预压力的作用,将持续与驱动面接触,但是由于过程d到过程a中微幅椭圆运动产生的惯性力大于此时第二压电作动器作动头的前端和第一压电作动器作动头的驱动面之间的摩擦力,第一压电作动器将继续水平向右移动;
[0046]
过程b中,第二压电作动器由收缩状态向外扩张,第二压电作动器作动头的前端和第一压电作动器作动头的驱动面之间的摩擦力小于过程a到过程b产生的惯性力,第一压电作动器将继续水平向右移动;
[0047]
过程c中,第二压电作动器的向外扩张,其顶端与驱动面作微幅椭圆运动,使压电作动器水平向右运动;
[0048]
过程d中,第二压电作动器的向内收缩,其顶端与驱动面作微幅椭圆运动,使压电作动器水平向右运动;
[0049]
当所述滑块沿着滑轨向上滑动使得限位板第一限位条端部的滑轮和所述滑块脱离时,限位板不起限定作用,在浮体向上的拉力以及锚定重物朝下的拉力作用下,承重条旋转倾斜带动限位板绕第二转动柱转动,使得释放锁体脱离锚定重物。
[0050]
本发明还公开了一种该全海深单相驱动压电释放机构采用双分区夹心式方案或贴片式方案时的工作方法,包含以下步骤:
[0051]
锁定时,第一压电作动器、第二压电作动器的作动头之间产生的静摩擦力阻止滑块在滑轨上滑动,限位板第一限位条端部的滑轮抵住所述滑块,限位板第二限位条抵住所述挂板承重条的下端,使得承重条水平进而使得承重条无法脱离悬挂在其上的锚定重物;
[0052]
进行释放时:
[0053]
分别采用时间相位相差90度的交流电信号ac-a、ac-b激励第一、第二压电作动器,使得第一压电作动器的弯振模态和第二压电作动器的弯振模态被同时激发,第一压电作动器的驱动面和第二压电作动器作动头的前端端点产生椭圆运动,使得第一压电作动器带动滑块朝着靠近浮体的方向移动,具体周期过程如下;
[0054]
令压电作动器端部相对于法兰固定位置的顺时针方向的弯曲称为弯振模态a,压电作动器端部相对于法兰固定位置的逆时针方向的弯曲称为弯振模态b;
[0055]
过程a:在0-t/4时间段,第一压电作动器由弯振模态a向平衡状态转变,其上各点
朝远离前梁体中轴线的位置运动;第二压电作动器由平衡状态向弯振模态a转变,其上各点朝靠近前梁体中轴线的位置运动;
[0056]
过程b:在t/4-2t/4时间段,第一压电作动器由平衡状态向弯振模态b转变,其上各点朝远离前梁体中轴线的位置运动;第二压电作动器由弯振模态b向平衡状态转变,其上各点朝远离梁体中轴线的位置运动;
[0057]
过程c:在2t/4-3t/4时间段,第一压电作动器由弯振模态b向平衡状态转变,其上各点朝靠近前梁体中轴线的位置运动;第二压电作动器由平衡状态向弯振模态a转变,其上各点朝远离前梁体中轴线的位置运动;
[0058]
过程d:在3t/4-t时间段,第一压电作动器由平衡状态向弯振模态a转变,其上各点朝靠近节点位置运动;第二压电作动器由弯振模态a向平衡状态转变,其上各点朝靠近前梁体中轴线的位置运动;
[0059]
过程a中,第一压电作动器的弯曲,第二压电作动器作动头的前端和第一压电作动器作动头的驱动面有脱离的趋势,由于第二压电作动器受到预压力的作用,将持续与驱动面接触,但是由于过程d到过程a中微幅椭圆运动产生的惯性力大于此时第二压电作动器作动头的前端和第一压电作动器作动头的驱动面之间的摩擦力,第一压电作动器将继续水平向右移动;
[0060]
过程b中,第一压电作动器由弯振模态b向前梁体中轴线位置靠近,第二压电作动器作动头的前端和第一压电作动器作动头的驱动面的摩擦力小于过程a到过程b产生的惯性力,第一压电作动器将继续水平向右移动;
[0061]
过程c中,第二压电作动器的向远离前梁体中轴线的弯曲,其顶端与驱动面作微幅椭圆运动,使第一压电作动器水平向右运动;
[0062]
过程d中,第二压电作动器的向靠近前梁体中轴线的弯曲,其顶端与驱动面作微幅椭圆运动,使压电作动器水平向右运动;
[0063]
当所述滑块沿着滑轨向上滑动使得限位板第一限位条端部的滑轮和所述滑块脱离时,限位板不起限定作用,在浮体向上的拉力以及锚定重物朝下的拉力作用下,承重条旋转倾斜带动限位板绕第二转动柱转动,使得释放锁体脱离锚定重物。
[0064]
本发明采用以上技术方案与现有技术相比,具有以下技术效果:
[0065]
1.摩擦驱动允许海水进入,无需动密封;
[0066]
2.贴片式压电换能器只需进行隔水、绝缘处理;夹心式压电换能器中存在的螺纹盲孔可被绝缘固化胶水填充;不论是贴片式还是夹心式压电换能器,它们结构内部无空腔,与外界海水间无压差,在高水压条件下不会被破坏,能适应深海高水压、低温、强腐蚀的恶劣环境;
[0067]
3.浮体与探测器提供的浮力,在定点监控、应答释放时保证压电换能器和动子间牢靠接触,在脱离上升时充当提升拉力实现探测器的上浮;
[0068]
4.利用压电作动器的静摩擦力实现了释放系统的断电自锁功能,滑轨和压电作动器的配合提升了应对探测器大角度倾斜、大幅度摆动极端工况的能力,大大增强了压电驱动型释放器水下长效服役的可靠性。
附图说明
[0069]
图1是本发明的结构示意图;
[0070]
图2是本发明中释放模块的结构示意图;
[0071]
图3是本发明采用单分区夹心式方案时第一压电作动器的结构示意图;
[0072]
图4是本发明采用双分区夹心式方案时第一电作动器的结构示意图;
[0073]
图5是本发明采用贴片式方案时第一压电作动器的结构示意图;
[0074]
图6是本发明采用单分区夹心式方案时第一压电作动器的纵振模态示意图;
[0075]
图7是本发明采用双分区夹心式方案时第一电作动器的弯振模态示意图;
[0076]
图8是本发明采用贴片式方案时第一压电作动器的纵振模态示意图;
[0077]
图9是本发明采用贴片式方案时第一压电作动器的弯振模态示意图;
[0078]
图10是本发明中释放模块锁定时的工作原理图;
[0079]
图11是本发明抛载时的流程示意图;
[0080]
图12是本发明中第一、第二压电作动器纵振工作模态时相对椭圆的分析图;
[0081]
图13是本发明中第一、第二压电作动器纵振工作模态时工作过程的分析图;
[0082]
图14是本发明中第一、第二压电作动器弯振工作模态时相对椭圆的分析图;
[0083]
图15是本发明中第一、第二压电作动器弯振工作模态时工作过程的分析图。
[0084]
图中,1-浮体,2-第一连接装置,3-释放机构,4-第二连接装置,5-锚定重物,3.1.固定板,3.2-第一压电作动器,3.3-第二压电作动器,3.4-挂板,3.5-限位板,3.6-挂板,3.7
‑ꢀ
限位板,3.8-第二转动柱,3.9-滑轮,3.10-滑轨,3.11-限位柱,3.2.1-作动头,3.2.2-前梁体,3.2.3-法兰,3.2.4-压电陶瓷模块,3.2.5-后梁体,3.2.6-预紧螺栓,3.2.7-梁体。
具体实施方式
[0085]
下面结合附图对本发明的技术方案做进一步的详细说明:
[0086]
本发明可以以许多不同的形式实现,而不应当认为限于这里所述的实施例。相反,提供这些实施例以便使本公开透彻且完整,并且将向本领域技术人员充分表达本发明的范围。在附图中,为了清楚起见放大了组件。
[0087]
应当理解,尽管这里可以使用术语第一、第二、第三等描述各个元件、组件和/或部分,但这些元件、组件和/或部分不受这些术语限制。这些术语仅仅用于将元件、组件和/或部分相互区分开来。因此,下面讨论的第一元件、组件和/或部分在不背离本发明教学的前提下可以成为第二元件、组件或部分。
[0088]
如图1所示,本发明公开了一种全海深单相驱动压电释放机构,包括浮体、探测器、释放模块、第一至第二连接装置以及锚定重物;
[0089]
所述浮体用于提供上浮浮力;
[0090]
所述探测器用于探测、监测海洋,布置在浮体内;
[0091]
如图2所示,所述释放模块包含释放锁体、第一压电作动器和第二压电作动器;
[0092]
所述释放锁体包含固定板、挂板、限位板、第一转动柱和第二转动柱;
[0093]
所述固定板上端设有用于铰接的连接环;
[0094]
所述挂板为l形板,包含相会垂直固连的转动条和承重条,所述转动条的下端和所述承重条的一端垂直固连,所述承重条用于悬挂所述锚定重物;
[0095]
所述限位板为u形板,包含第一限位条、第二限位条和连接条,所述连接条的一端分别和所述第一限位条、第二限位条的一端垂直固连;所述第一限位条的长度大于第二限位条的长度,且第一限位条远离连接条的一端设有滑轮;
[0096]
所述第一转动柱、第二转动柱均和所述固定板垂直固连;所述转动条上端和所述第一转动柱转动相连,使得所述挂板平行于所述固定板且能够绕所述第一转动柱自由转动;所述连接条和所述第二转动柱转动相连,使得所述限位板平行于所述固定板且能够绕所述第二转动柱自由转动;所述挂板、限位板的开口相向;
[0097]
所述固定板在所述第一转动柱上方设有竖直的滑轨,且滑轨内设有滑块;当所述限位板第一限位条端部的滑轮抵住所述滑块时,限位板第二限位条抵住所述挂板承重条的下端,使得承重条水平进而使得承重条无法脱离悬挂在其上的锚定重物;当所述滑块沿着滑轨向上滑动使得限位板第一限位条端部的滑轮和所述滑块脱离时,限位板不起限定作用,在浮体向上的拉力以及锚定重物朝下的拉力作用下,承重条旋转倾斜带动限位板绕第二转动柱转动,使得释放锁体脱离锚定重物;
[0098]
所述第一压电作动器、第二压电作动器结构相同,均包括压电复合梁、法兰和作动头,其中,所述作动头为横截面从后往前逐渐变细的柱体,其前端侧壁两侧设有相互平行的驱动面;所述作动头后端端面和所述压电复合梁前端的端面形状相同,且作动头后端端面和所述压电复合梁前端端面同轴固连;所述压电复合梁用于驱动所述作动头;所述法兰用于固定所述压电复合梁;
[0099]
所述第一压电作动器通过其法兰固定在所述滑块上,和所述滑轨平行;所述第二压电作动器通过其法兰固定在所述固定板上,和所述第一压电作动器相互垂直,且第二压电作动器作动头的前端抵在第一压电作动器作动头的一个驱动面上;
[0100]
所述第一压电作动器、第二压电作动器用于相互配合以控制所述滑块在滑轨上滑动;
[0101]
所述第一、第二连接装置均包含杆体和铰接环,其中,所述铰接环呈圆环状;所述杆体一端和铰接环的外壁固连且杆体指向铰接环的圆心;
[0102]
所述第一连接装置杆体远离其铰接环的一端和所述浮体下端铰接,第一连接装置的铰接环和所述固定板的连接环铰接;
[0103]
所述第二连接装置的铰接环套在所述挂板的承重条上,第二连接装置杆体远离其铰接环的一端和锚定重物铰接;
[0104]
所述锚定重物用于提供竖直向下的重力,起锚定作用,防止压电释放系统因水流扰动或海水温度梯度的影响使得锚定位置发生移动。
[0105]
作为本发明一种全海深单相驱动压电释放机构进一步的优化方案,所述固定板在所述挂板和限位板之间还设有和固定板垂直固连的限位柱,用于限制所述限位板的转动程度。
[0106]
本发明中第一压电作动器和第二压电作动器之间的夹角不限定为90
°
。
[0107]
作为本发明一种全海深单相驱动压电释放机构进一步的优化方案,所述压电复合梁包含预紧螺栓、后梁体、压电陶瓷模块和前梁体;
[0108]
所述预紧螺栓包含螺帽和螺柱;所述前梁体、后梁体为横截面形状相同的正棱柱或圆柱体,前梁体一个端面的中心设有和所示预紧螺栓相匹配的螺纹孔,后梁体一个端面
的中心设有和所述预紧螺栓相匹配的沉头通孔;
[0109]
所述压电陶瓷模块包含2m个单分区压电陶瓷片和2m+1个电极片,m为大于等于1的自然数;所述单分区压电陶瓷片呈正多边形或圆形,中心设有供预紧螺栓穿过的通孔,沿着厚度方向极化;所述电极片的形状和所述单分区压电陶瓷片相同;所述2m+1个电极片和2m个单分区压电陶瓷片依次交替层叠,使得2m+1个电极片和2m个单分区压电陶瓷片同轴且相邻单分区压电陶瓷片之间有电极片分隔;相邻单分区压电陶瓷片的极化方向相反;
[0110]
所述预紧螺栓的螺柱依次穿过所述后梁体的沉头通孔、压电陶瓷模块中2m个单分区压电陶瓷片和2m+1个电极片中心的通孔后和前梁体的螺纹孔螺纹相连,将2m个单分区压电陶瓷片和2m+1个电极片压紧;
[0111]
我们令此种方案为双分区夹心式方案,如图3所示。此时,当交流电信号激励第一压电作动器在空间上发生一阶纵振时,压电复合梁a上的各点都朝着远离(靠近)法兰位置的方向移动,如图6所示。
[0112]
作为本发明一种全海深单相驱动压电释放机构进一步的优化方案,所述压电复合梁包含预紧螺栓、后梁体、压电陶瓷模块和前梁体;
[0113]
所述预紧螺栓包含螺帽和螺柱;所述前梁体、后梁体为横截面形状相同的正棱柱或圆柱体,前梁体一个端面的中心设有和所示预紧螺栓相匹配的螺纹孔,后梁体一个端面的中心设有和所述预紧螺栓相匹配的沉头通孔;
[0114]
所述压电陶瓷模块包含2m个双分区压电陶瓷片和2m+1个电极片,m为大于等于1的自然数;所述双分区压电陶瓷片呈正多边形或圆形,中心设有供预紧螺栓穿过的通孔,沿着厚度方向极化,双分区压电陶瓷片的极化分界线为直线,且双分区压电陶瓷片两个分区的极化方向相反;所述电极片的形状和所述双分区压电陶瓷片相同;所述2m+1个电极片和2m个双分区压电陶瓷片依次交替层叠,使得2m+1个电极片和2m个双分区压电陶瓷片同轴,2m个双分区压电陶瓷片的极化分界线共面,且相邻双分区压电陶瓷片之间有电极片分隔;相邻双分区压电陶瓷片的极化方向相反;
[0115]
所述预紧螺栓的螺柱依次穿过所述后梁体的沉头通孔、压电陶瓷模块中2m个双分区压电陶瓷片和2m+1个电极片中心的通孔后和前梁体的螺纹孔螺纹相连,将2m个双分区压电陶瓷片和2m+1个电极片压紧;
[0116]
我们令此种方案为单分区夹心式方案,如图4所示。此时,当交流电信号激励第一压电作动器在空间上发生一阶弯振时,压电复合梁a上的各点都朝着远离(靠近)后梁体中轴线位置的方向移动,如图7所示。
[0117]
作为本发明一种全海深单相驱动压电释放机构进一步的优化方案,所述压电复合梁包含梁体、第一压电陶瓷片和第二压电陶瓷片,其中,所述梁体为柱体;所述第一、第二压电陶瓷片均沿厚度方向极化,对称地粘贴在梁体的侧壁两侧;第一压电陶瓷片和第二压电陶瓷片均使用d31工作模式;
[0118]
我们令此种方案为贴片式方案,如图5所示。此时,当交流电信号激励第一压电作动器在空间上发生一阶纵振时,压电复合梁a上的各点都朝着远离(靠近)法兰位置的方向移动,如图8所示;当交流电信号激励第一压电作动器在空间上发生一阶弯振时,压电复合梁a上的各点都朝着远离(靠近)后梁体中轴线位置的方向移动,如图9所示。
[0119]
本发明还公开了一种该全海深单相驱动压电释放机构采用单分区夹心式方案或
贴片式方案时的工作方法,包含以下步骤:
[0120]
锁定时,第一压电作动器、第二压电作动器的作动头之间产生的静摩擦力阻止滑块在滑轨上滑动,限位板第一限位条端部的滑轮抵住所述滑块,限位板第二限位条抵住所述挂板承重条的下端,使得承重条水平进而使得承重条无法脱离悬挂在其上的锚定重物;具体如图10 所示,锚定重物通过第二连接装置挂在挂钩上,在浮体向上的拉力f
t
下,其向下的重力g使挂板产生顺时针方向的力矩mz(g);承重条和限位板相抵,接触点的压力f
p
使限位板产生逆时针方向的力矩mz(f
p
);滑块为和其相抵的滑轮提供支撑力fh,支撑力fh为限位板提供顺时针方向的力矩mz(fh),阻止限位板向逆时针方向转动;力矩mz(fh)等于力矩mz(f
p
),限位板无法旋转,实现锁定功能;
[0121]
进行释放时:
[0122]
分别采用时间相位相差90度的交流电信号ac-a、ac-b激励第一、第二压电作动器,使得第一压电作动器的纵振模态和第二夹心式纵振的纵振模态被同时激发,第一压电作动器的驱动面和第二压电作动器作动头的前端端点产生椭圆运动,使得第一压电作动器带动滑块朝着靠近浮体的方向移动,如图13所示,具体周期过程如下:
[0123]
过程a:在0-t/4时间段,第一压电作动器由收缩状态向平衡状态转变,其上各点朝远离节点位置运动;第二压电作动器由平衡状态向收缩状态转变,其上各点朝靠近节点位置运动;
[0124]
过程b:在t/4-2t/4时间段,第一压电作动器由平衡状态向扩张状态转变,其上各点朝远离节点位置运动;第二压电作动器由收缩状态向平衡状态转变,其上各点朝远离节点位置运动;
[0125]
过程c:在2t/4-3t/4时间段,第一压电作动器由扩张状态向平衡状态转变,其上各点朝靠近节点位置运动;第二压电作动器由平衡状态向扩张状态转变,其上各点朝远离节点位置运动;
[0126]
过程d:在3t/4-t时间段,第一压电作动器由平衡状态向收缩状态转变,其上各点朝靠近节点位置运动;第二压电作动器由扩张状态向平衡状态转变,其上各点朝靠近节点位置运动;
[0127]
过程a中,第二压电作动器的向内收缩,第二压电作动器作动头的前端和第一压电作动器作动头的驱动面有脱离的趋势,由于第二压电作动器受到预压力的作用,将持续与驱动面接触,但是由于过程d到过程a中微幅椭圆运动产生的惯性力大于此时第二压电作动器作动头的前端和第一压电作动器作动头的驱动面之间的摩擦力,第一压电作动器将继续水平向右移动;
[0128]
过程b中,第二压电作动器由收缩状态向外扩张,第二压电作动器作动头的前端和第一压电作动器作动头的驱动面之间的摩擦力小于过程a到过程b产生的惯性力,第一压电作动器将继续水平向右移动;
[0129]
过程c中,第二压电作动器的向外扩张,其顶端与驱动面作微幅椭圆运动,使压电作动器水平向右运动;
[0130]
过程d中,第二压电作动器的向内收缩,其顶端与驱动面作微幅椭圆运动,使压电作动器水平向右运动;
[0131]
当所述滑块沿着滑轨向上滑动使得限位板第一限位条端部的滑轮和所述滑块脱
离时,限位板不起限定作用,在浮体向上的拉力以及锚定重物朝下的拉力作用下,承重条旋转倾斜带动限位板绕第二转动柱转动,使得释放锁体脱离锚定重物,如图11所示。
[0132]
如图12所示,本发明在纵振工作模态时,驱动面形成相对椭圆如下:
[0133]
在参考基平面o上有梁1和梁2,o1和o2为其节点并各自建立连体基。θi是姿态角,由连体基xi轴正向与参考基x轴正向的夹角确定。梁1在信号u1=ac-1,梁2在信号 u2=ac-2的激励下各自产生一阶纵振,点p是梁1的作动点,点q是梁2上的任意一点,p 和q随梁的振动位移至p'和q'。点p'的矢量为
[0134][0135]
其中
[0136][0137][0138]
式中l
p
代表p点到o点的长度
[0139][0140]
将(2)、(3)和(4)代入(1)中,可以得到
[0141][0142]
其中
[0143][0144]
其中,t1是连体基o1关于公共基o的方向余弦阵,可简化为
[0145][0146]
同理
[0147][0148]
所以,q'点相对于p'点的位置矢量为
[0149][0150]
取θ1=0
°
、ω1=ω2=ω则式(9)可以简化为
[0151][0152]
参考基平面oy方向合成振动的振幅和相位可以如下表示
[0153][0154][0155]
取dy=-a2sinθ2,则式(10)可以简化为
[0156][0157]
其轨迹满足方程;
[0158][0159]
式(14)表明,两个具有一定夹角的简谐振动合成后其振动轨迹为椭圆;
[0160]
当θ2=90
°
时,式(14)可以简化为;
[0161][0162]
式(15)表明,对于两个在空间上正交的弯振梁,当激励电压之间相位差为90
°
时,接触部位质点的相对振动轨迹为椭圆,可以通过调节激励电压的幅值实现对椭圆主轴长度的调整。
[0163]
本发明还公开了一种该全海深单相驱动压电释放机构采用双分区夹心式方案或贴片式方案时的工作方法,包含以下步骤:
[0164]
锁定时,第一压电作动器、第二压电作动器的作动头之间产生的静摩擦力阻止滑块在滑轨上滑动,限位板第一限位条端部的滑轮抵住所述滑块,限位板第二限位条抵住所述挂板承重条的下端,使得承重条水平进而使得承重条无法脱离悬挂在其上的锚定重物;
[0165]
进行释放时:
[0166]
分别采用时间相位相差90度的交流电信号ac-a、ac-b激励第一、第二压电作动器,使得第一压电作动器的弯振模态和第二压电作动器的弯振模态被同时激发,第一压电作动器的驱动面和第二压电作动器作动头的前端端点产生椭圆运动,使得第一压电作动器带动滑块朝着靠近浮体的方向移动,如图15所示,具体周期过程如下;
[0167]
令压电作动器端部相对于法兰固定位置的顺时针方向的弯曲称为弯振模态a,压电作动器端部相对于法兰固定位置的逆时针方向的弯曲称为弯振模态b;
[0168]
过程a:在0-t/4时间段,第一压电作动器由弯振模态a向平衡状态转变,其上各点朝远离前梁体中轴线的位置运动;第二压电作动器由平衡状态向弯振模态a转变,其上各点朝靠近前梁体中轴线的位置运动;
[0169]
过程b:在t/4-2t/4时间段,第一压电作动器由平衡状态向弯振模态b转变,其上各点朝远离前梁体中轴线的位置运动;第二压电作动器由弯振模态b向平衡状态转变,其上各点朝远离梁体中轴线的位置运动;
[0170]
过程c:在2t/4-3t/4时间段,第一压电作动器由弯振模态b向平衡状态转变,其上各点朝靠近前梁体中轴线的位置运动;第二压电作动器由平衡状态向弯振模态a转变,其上各点朝远离前梁体中轴线的位置运动;
[0171]
过程d:在3t/4-t时间段,第一压电作动器由平衡状态向弯振模态a转变,其上各点朝靠近节点位置运动;第二压电作动器由弯振模态a向平衡状态转变,其上各点朝靠近前梁体中轴线的位置运动;
[0172]
过程a中,第一压电作动器的弯曲,第二压电作动器作动头的前端和第一压电作动器作动头的驱动面有脱离的趋势,由于第二压电作动器受到预压力的作用,将持续与驱动面接触,但是由于过程d到过程a中微幅椭圆运动产生的惯性力大于此时第二压电作动器作动头的前端和第一压电作动器作动头的驱动面之间的摩擦力,第一压电作动器将继续水平向右移动;
[0173]
过程b中,第一压电作动器由弯振模态b向前梁体中轴线位置靠近,第二压电作动器作动头的前端和第一压电作动器作动头的驱动面的摩擦力小于过程a到过程b产生的惯性力,第一压电作动器将继续水平向右移动;
[0174]
过程c中,第二压电作动器的向远离前梁体中轴线的弯曲,其顶端与驱动面作微幅椭圆运动,使第一压电作动器水平向右运动;
[0175]
过程d中,第二压电作动器的向靠近前梁体中轴线的弯曲,其顶端与驱动面作微幅椭圆运动,使压电作动器水平向右运动;
[0176]
当所述滑块沿着滑轨向上滑动使得限位板第一限位条端部的滑轮和所述滑块脱离时,限位板不起限定作用,在浮体向上的拉力以及锚定重物朝下的拉力作用下,承重条旋转倾斜带动限位板绕第二转动柱转动,使得释放锁体脱离锚定重物。
[0177]
如图14所示,本发明在弯振工作模态时,驱动面形成相对椭圆的原理如下:
[0178]
在参考基平面o上有梁1和梁2,o1和o2为其重心并各自建立连体基。θi是姿态角,由连体基xi轴正向与参考基x轴正向的夹角确定。梁1在信号u1=,梁2在信号u2的激励下各自产生一阶弯振,点p是梁1的作动点,点q是梁2上的任意一点,p和q随梁的振动位移至p'和q'。点p'的矢量为
[0179][0180]
其中
[0181][0182][0183]
式中l
p
代表p点到节点o的长度
[0184][0185]
将(17)、(18)和(19)代入(16)中,可以得到:
[0186][0187]
其中
[0188][0189]
其中,t1是连体基o1关于公共基o的方向余弦阵,可简化为
[0190][0191]
同理
[0192][0193]
所以,q'点相对于p'点的位置矢量为
[0194][0195]
取θ1=0
°
、ω1=ω2=ω则式(24)可以简化为
[0196]
[0197]
参考基平面oy方向合成振动的振幅和相位可以如下表示
[0198][0199][0200]
取d
x
=-a2sinθ2,则式(25)可以简化为
[0201][0202]
其轨迹满足方程
[0203][0204]
式(29)表明,两个具有一定夹角的简谐振动合成后其振动轨迹为椭圆。
[0205]
当θ2=90
°
时,式(29)可以简化为
[0206][0207]
式(30)表明,对于两个在空间上正交的纵振梁,当激励电压之间相位差为90
°
时,接触部位质点的相对振动轨迹为椭圆,可以通过调节激励电压的幅值实现对椭圆主轴长度的调整。
[0208]
本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
[0209]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1