一种冰下双运动模式无人潜水器
本发明属于水下机器人领域,具体地说是一种可在冰下敏捷巡游并可沿水下冰层爬行的冰下双运动模式无人潜水器。
背景技术:
1、极地对全球环境与气候系统影响巨大,但人类对其了解极少。在北极的相关研究中,针对海冰及冰下环境的研究极为重要,然而大面积覆盖的海冰和恶劣的天气限制了传统手段对冰下环境的探测。无人潜水器作为一种先进的运动平台,可以在海冰下持续开展针对海冰和水体的观测,限制条件较小,可为北极冰下环境的研究提供一种大范围、连续的、全新的技术手段。
技术实现思路
1、本发明的目的在于提供一种冰下双运动模式无人潜水器,以实现无人潜水器可冰下通过吸附力沿冰层滑行,实现对冰层的近距离探测;同时可以脱离冰层在水下自主航行,完成冰下水文信息采样任务。
2、本发明的目的是通过以下技术方案来实现的:
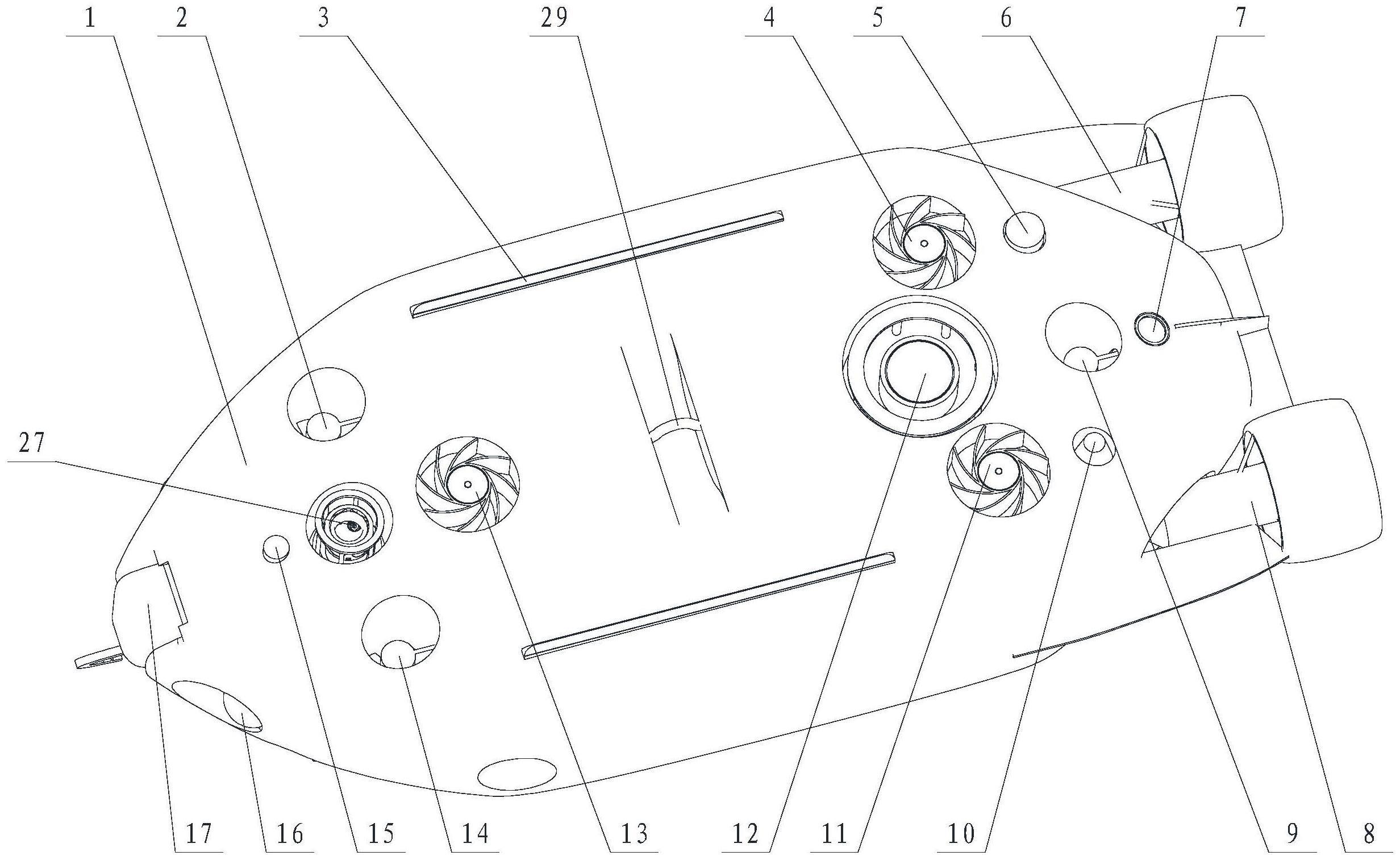
3、本发明包括浮力材外壳、推进系统、声学通讯系统、光学探测系统、水文信息观测设备、前视声呐、涡旋吸盘、dvl—惯导组合导航系统、浮力调节装置、能源舱及导航控制舱,其中推进系统包括安装于所述浮力材外壳上的推进器及设置于浮力材外壳内部的推进控制舱,所述推进器与推进控制舱内的控制器相连;所述声学通讯系统包括分别安装于浮力材外壳上的声通讯机及超短基线,为无人潜水器提供水下声学定位能力;所述光学探测系统安装于浮力材外壳上,用于水下观测、拍摄、测量;所述水文信息观测设备安装于浮力材外壳上,用于观测水下参数;所述前视声呐、涡旋吸盘、dvl—惯导组合导航系统分别安装于浮力材外壳上,所述浮力调节装置、能源舱及导航控制舱分别设置于浮力材外壳内部,所述dvl—惯导组合导航系统与导航控制舱内的控制器相连,所述能源舱分别与推进控制舱内的控制器以及导航控制舱内的控制器连接,为所述无人潜水器供电;所述无人潜水器通过推进器实现冰下巡游,或通过所述涡旋吸盘吸附于冰面,配合所述推进器实现沿冰面航行。
4、其中:所述推进器包括垂直推进器、右舷推进器、左舷推进器及水平推进器,所述垂直推进器安装于浮力材外壳的顶部,所述右舷推进器与左舷推进器安装于浮力材外壳艉部的左右两侧,所述水平推进器位于无人潜水器的艏部与艉部之间。
5、所述垂直推进器包括右舷垂直推进器、艉部垂直推进器及左舷垂直推进器,所述右舷垂直推进器与左舷垂直推进器安装于浮力材外壳艏部的左右两侧,所述艉部垂直推进器位于右舷推进器与左舷推进器的中间,并与所述右舷垂直推进器、左舷垂直推进器呈三角形分布。
6、所述声通讯机及超短基线分别安装于浮力材外壳艏部的顶部。
7、所述光学探测系统包括艏部左摄像头、艏部右摄像头、光通量计、照明灯及艉部摄像头,所述艏部左摄像头与艏部右摄像头分别安装于浮力材外壳艏部的左右两侧,用于水下视频拍摄;所述艉部摄像头安装于浮力材外壳的艉部,用于近距离观测海冰;所述光通量计用于测量冰下光学参数。
8、所述水文信息观测设备包括分别安装于浮力材外壳上的ctd及叶绿素计。
9、所述涡旋吸盘包括右舷涡旋吸盘、左舷涡旋吸盘及艏部涡旋吸盘,所述右舷涡旋吸盘及左舷涡旋吸盘分别安装于浮力材外壳艉部的左右两侧,并与所述艏部涡旋吸盘呈三角形分布。
10、所述浮力材外壳的顶部安装有减小无人潜水器沿冰面滑行时航行阻力的滑行冰刀。
11、所述浮力材外壳为减小无人潜水器冰下航行阻力的光滑流线型。
12、所述能源舱包括对称设置于浮力材外壳内左右两侧的左能源舱及右能源舱,所述推进控制舱内的控制器分别与左能源舱和右能源舱相连,所述导航控制舱内的控制器与距离最近的左能源舱或右能源舱相连。
13、本发明的优点与积极效果为:
14、1.本发明具备水下敏捷巡游能力,采用多推进器与浮力调节机构构成冰下多自由度驱动系统,使无人潜水器可做大角度机动,更易于适应各种凹凸不平的冰面;本发明还具备冰下吸附能力,可通过非接触式吸附沿冰层低速爬行。
15、2.本发明具备声学引导功能,利用声通,超短基线实现载体冰下综合定位。
16、3.本发明具备声学、光学探测功能:水下机器人艏部及艉部搭载高清摄像头,用于光学探测。艏部安装有前视声呐,用于探测和避碰。
17、4.本发明具备光通量计和ctd、叶绿素计等传感器,用于观测海冰和水文信息。
技术特征:
1.一种冰下双运动模式无人潜水器,其特征在于:包括浮力材外壳(1)、推进系统、声学通讯系统、光学探测系统、水文信息观测设备、前视声呐(17)、涡旋吸盘、dvl—惯导组合导航系统(12)、浮力调节装置(20)、能源舱及导航控制舱(23),其中推进系统包括安装于所述浮力材外壳(1)上的推进器及设置于浮力材外壳(1)内部的推进控制舱(22),所述推进器与推进控制舱(22)内的控制器相连;所述声学通讯系统包括分别安装于浮力材外壳(1)上的声通讯机(15)及超短基线(27),为无人潜水器提供水下声学定位能力;所述光学探测系统安装于浮力材外壳(1)上,用于水下观测、拍摄、测量;所述水文信息观测设备安装于浮力材外壳(1)上,用于观测水下参数;所述前视声呐(17)、涡旋吸盘、dvl—惯导组合导航系统(12)分别安装于浮力材外壳(1)上,所述浮力调节装置(20)、能源舱及导航控制舱(23)分别设置于浮力材外壳(1)内部,所述dvl—惯导组合导航系统(12)与导航控制舱(23)内的控制器相连,所述能源舱分别与推进控制舱(22)内的控制器以及导航控制舱(23)内的控制器连接,为所述无人潜水器供电;所述无人潜水器通过推进器实现冰下巡游,或通过所述涡旋吸盘吸附于冰面,配合所述推进器实现沿冰面航行。
2.根据权利要求1所述的冰下双运动模式无人潜水器,其特征在于:所述推进器包括垂直推进器、右舷推进器(6)、左舷推进器(8)及水平推进器(26),所述垂直推进器安装于浮力材外壳(1)的顶部,所述右舷推进器(6)与左舷推进器(8)安装于浮力材外壳(1)艉部的左右两侧,所述水平推进器(26)位于无人潜水器的艏部与艉部之间。
3.根据权利要求2所述的冰下双运动模式无人潜水器,其特征在于:所述垂直推进器包括右舷垂直推进器(2)、艉部垂直推进器(9)及左舷垂直推进器(14),所述右舷垂直推进器(2)与左舷垂直推进器(14)安装于浮力材外壳(1)艏部的左右两侧,所述艉部垂直推进器(9)位于右舷推进器(6)与左舷推进器(8)的中间,并与所述右舷垂直推进器(2)、左舷垂直推进器(14)呈三角形分布。
4.根据权利要求1所述的冰下双运动模式无人潜水器,其特征在于:所述声通讯机(15)及超短基线(27)分别安装于浮力材外壳(1)艏部的顶部。
5.根据权利要求1所述的冰下双运动模式无人潜水器,其特征在于:所述光学探测系统包括艏部左摄像头(16)、艏部右摄像头(18)、光通量计(10)、照明灯(28)及艉部摄像头(7),所述艏部左摄像头(16)与艏部右摄像头(18)分别安装于浮力材外壳(1)艏部的左右两侧,用于水下视频拍摄;所述艉部摄像头(7)安装于浮力材外壳(1)的艉部,用于近距离观测海冰;所述光通量计(10)用于测量冰下光学参数。
6.根据权利要求1所述的冰下双运动模式无人潜水器,其特征在于:所述水文信息观测设备包括分别安装于浮力材外壳(1)上的ctd(25)及叶绿素计(5)。
7.根据权利要求1所述的冰下双运动模式无人潜水器,其特征在于:所述涡旋吸盘包括右舷涡旋吸盘(4)、左舷涡旋吸盘(11)及艏部涡旋吸盘(13),所述右舷涡旋吸盘(4)及左舷涡旋吸盘(11)分别安装于浮力材外壳(1)艉部的左右两侧,并与所述艏部涡旋吸盘(13)呈三角形分布。
8.根据权利要求1所述的冰下双运动模式无人潜水器,其特征在于:所述浮力材外壳(1)的顶部安装有减小无人潜水器沿冰面滑行时航行阻力的滑行冰刀(3)。
9.根据权利要求1所述的冰下双运动模式无人潜水器,其特征在于:所述浮力材外壳(1)为减小无人潜水器冰下航行阻力的光滑流线型。
10.根据权利要求1所述的冰下双运动模式无人潜水器,其特征在于:所述能源舱包括对称设置于浮力材外壳内左右两侧的左能源舱(21)及右能源舱(24),所述推进控制舱(22)内的控制器分别与左能源舱(21)和右能源舱(24)相连,所述导航控制舱(23)内的控制器与距离最近的左能源舱(21)或右能源舱(24)相连。
技术总结
本发明属于水下机器人领域,具体地说是一种冰下双运动模式无人潜水器,包括低阻流线型浮力材外壳、龙骨框架、推进系统、声学通讯系统、光学探测系统、水文信息观测设备、前视声呐、涡旋吸盘、DVL—惯导组合导航系统、浮力调节装置、能源舱及导航控制舱,浮力材外壳由若干加工成型的浮力材料构成,整体呈流线型;龙骨框架由铝合金焊接成型;航行控制单元包括惯导、DVL及航行控制舱构成;能源单元由二次电池组;推进系统包括垂直推进器、水平推进器和推进器控制舱;吸附单元包括涡旋吸盘和滑行冰刀;声学通讯单元包括超短基线和声通讯机;浮力材艏部及顶部设有声学,水文信息观测系统。本发明有两种工作模式,即水下敏捷巡游模式和冰下爬行模式。
技术研发人员:刘崇德,曾俊宝,李硕,徐高朋
受保护的技术使用者:中国科学院沈阳自动化研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!