一种仿生乌贼水下工作平台装置及控制方法
1.本发明属于仿生机械的技术领域,具体公开了一种仿生乌贼水下工作平台装置及控制方法。
背景技术:
2.水下蕴藏着极为丰富的自然资源。随着水下探测和开发活动的深入,对水下作业机器的需求不断增长,并对水下作业机器的机动性、平稳性和高效性提出了更高的要求。目前,大多数水下作业机器采用传统的螺旋桨推进方式,但这种推进方式噪音大、效率低、机动性较差,低速状态下控制难度较大。水下仿生机器主要将生物在水下的天然运动优势应用到机械中,具有重要的研究价值与应用前景。在水下仿生机器的模仿对象中,以仿生鱼、仿生水母的研究最为广泛,如cn114545953a公开了一种仿生鱼路径控制方法、装置及仿生鱼,cn112201136a公开了一种仿生水母足及应用该仿生水母足的机械水母。而乌贼采用侧鳍波动推进加快速喷射推进的复合推进方式,这种推进方法可同时满足高速、低速、悬停等实际工作需求,在水下复杂环境中仍具有良好的机动性和稳定性,极具仿生价值。通过模仿乌贼复合推进方式,并应用到水下作业机器上,可创造出性能更好的水下仿生工作平台。但是传统的仿生乌贼如cn110550169a公开的一种仿生线驱动腕乌贼,难以模拟乌贼侧鳍波动运动过程,不利于实现水下悬浮、转向、姿态调整的功能,难以咋固定区域长久定点布控。
技术实现要素:
3.本发明提供一种仿生乌贼水下工作平台装置及控制方法,该装置侧翼悬浮机构可模拟乌贼侧鳍波动运动过程,实现水下悬浮、转向、姿态调整的功能,运动灵活稳定,易于固定区域长久定点布控,与尾部反冲推进机构协调控制,可在水下复杂环境中同时满足高速、低速、悬停等实际工作需求,具有较强的机动性和平稳性。
4.本发明提供一种仿生乌贼水下工作平台装置,包括核心舱、尾部反冲推进机构、侧翼悬浮机构和平台控制系统;核心舱内部中空;尾部反冲推进机构设置在核心舱的尾部,用于提供向前的推进力;侧翼悬浮机构有两组,分别对称安装在核心舱的两侧;每组侧翼悬浮机构包括侧翼支架、曲轴组件、侧翼模块、摇杆支架和侧翼驱动源;多组侧翼支架等间隔固定在所述核心舱的外侧,侧翼支架上设置有曲轴安装孔和摇杆安装孔;曲轴组件包括依次连接的多组曲拐,每组曲拐设置在相邻两组侧翼支架之间,每组曲拐均包括l形曲臂和连接销,两根l形曲臂相对设置且伸出端朝向外侧,由平行于伸出端的连接销固定连接;相邻两组曲拐设置有相位差,前一曲拐的伸出端与后一曲拐的伸出端固定连接,连接处转动穿过曲轴安装孔;第一组曲拐和最后一组曲拐的伸出端分别转动穿过第一组侧翼支架和最后一组侧翼支架的曲轴安装孔;摇杆支架穿过摇杆安装孔;侧翼模块包括多根侧翼以及覆盖在多根侧翼上的侧翼膜;每根侧翼由侧翼连杆和侧翼摇杆铰接构成,侧翼连杆转动穿过连接销,侧翼摇杆转动穿过摇杆支架;侧翼驱动源与第一组曲拐或最后一组曲拐的伸出端连接,驱动曲轴组件旋转,进而带动侧翼模块以预设相位差上下摆动,实现乌贼侧鳍波动运动的
模拟;平台控制系统密封安装在核心舱内,用于控制尾部反冲推进机构和侧翼悬浮机构。
5.进一步地,侧翼驱动源包括水泵、水泵支架、扇叶;扇叶固定在第一组曲拐或最后一组曲拐的伸出端上;水泵支架安装在核心舱外;水泵安装在水泵支架上,出水口朝向扇叶,使喷出水流推动扇叶转动。
6.进一步地,l形曲臂分为第一曲臂和第二曲臂,第一曲臂的伸出端为圆形轴,圆形轴上设置有非圆孔,第二曲臂的伸出端为非圆型面,第一组曲拐和最后一组曲拐的伸出端为圆形轴;第一组曲拐或最后一组曲拐由两根第一曲臂和连接销连接而成,剩余曲拐由第二曲臂、连接销和第一曲臂连接而成,相邻两组曲拐通过非圆型面和非圆孔插接。
7.进一步地,相邻曲拐间设置有90
°
相位差。
8.进一步地,尾部反冲推进机构包括电动推杆、骨架模块、后支架、喷嘴;电动推杆的前端密封固定于核心舱的后端中心上,后端与后支架的中心固接;骨架模块包括多根骨架以及储水腔膜;多根骨架沿电动推杆的圆周方向均匀布置,每根骨架由第一连杆与第二连杆铰接构成,第一连杆的前端与核心舱的后端铰接,第二连杆的后端与后支架铰接;储水腔膜覆盖在多根骨架上形成储水腔;后支架上设置多个绕中心均匀分布的通孔;喷嘴固定设置在后支架后侧,呈空心圆台状,顶端开口。
9.进一步地,核心舱包括半球形前罩、前端盖、前端盖密封圈、密封盖、密封盖密封圈、舱体、后端盖、套筒、后端盖密封圈、套筒密封圈;舱体中间为圆柱形空腔,用于安装平台控制系统,两侧为平面,用于安装侧翼悬浮机构;半球形前罩密封安装于舱体的前端;前端盖嵌入舱体的前端,前端盖与舱体接触面上设置有密封槽并加装前端盖密封圈,前端盖的中心开设中心孔,中心孔上设置有密封盖,密封盖与中心孔接触面上设置有密封槽并加装密封盖密封圈;后端盖嵌入舱体的后端,中心开设中心孔,后端盖与舱体接触面上设置有密封槽并加装后端盖密封圈;套筒穿过后端盖的中心孔,接触面上设置有密封槽并加装套筒密封圈。
10.进一步地,电动推杆的前端密封固定于套筒中。
11.进一步地,平台控制系统包括锂电池组、arduino uno开发板、电机驱动板、dc-dc降压稳压模块。
12.本发明提供一种仿生乌贼水下工作平台装置的控制方法,采用上述仿生乌贼水下工作平台装置进行侧翼悬浮及转向调节,包括下述步骤:
13.控制侧翼驱动源驱动曲轴组件旋转,进而带动侧翼模块以预设相位差上下摆动,实现乌贼侧鳍波动运动的模拟,控制两侧曲轴组件以相同的转速工作,两侧侧翼模块的波动频率相等,可实现悬浮运动;
14.在保持相对平衡的基础上,控制两侧曲轴组件使其存在转速差,曲轴组件转速高的一侧,侧翼模块波动频率高,波动角度更替更频繁,产生更多的涡流提供推动力,仿生乌贼水下工作平台装置将向曲轴组件转速低的一侧转向,两侧曲轴组件转速差越大则转向角度越大,转速差越小则转向角度越小,通过控制两侧曲轴组件的转速控制转向时间。
15.本发明提供一种仿生乌贼水下工作平台装置的控制方法,采用上述仿生乌贼水下工作平台装置进行尾部反冲运动,包括下述步骤:
16.控制电动推杆低速收缩,使储水腔缓慢舒张,第一连杆与第二连杆所呈夹角逐渐减小,储水舱的容积逐渐增大,水通过喷嘴以及后机架的通孔被缓慢吸入储水腔,进行反冲
运动的第一阶段,即储水蓄力,当电动推杆收缩到最短时,储水腔容积达到最大值;
17.控制电动推杆高速推出,使储水腔快速收缩,第一连杆与第二连杆所呈夹角逐渐增大,储水舱的容积逐渐减小,水通过后机架的通孔以及喷嘴快速喷出,在水的反作用力下仿生乌贼水下工作平台装置快速向前运动,进行反冲运动的第二阶段,即喷水前进,当电动推杆的行程达到最大值时,储水舱的容积达到最小值,至此一个完整的尾部反冲运动完成。
18.本发明具有以下有益效果:
19.1、采用可变相位角组装式侧翼悬浮机构,通过曲轴组件带动多根侧翼以预设的相位差上下摆动,配合实现波动运动,模拟乌贼侧鳍波动运动过程,可实现平台在水下悬浮、转向、姿态调整等功能,运动灵活稳定,易于固定区域长久定点布控;
20.2、侧翼悬浮机构采用外置式,结构简单,方便安装、检修及更换,充分利用仿生乌贼水下工作平台装置所处的水下环境,采用水泵抽水加压,作为曲轴组件旋转的动力源,构思巧妙,简化侧翼驱动源;
21.3、尾部采用电动推杆与骨架模块相配合的设计,通过电动推杆伸缩带动储水腔容积变化,模拟实现乌贼尾部喷水反冲运动,可为整个装置提供主推力,实现整体装置的快速运动,而且结构简单;
22.4、通过尾部反冲推进机构和侧翼悬浮机构的协调控制,可在水下复杂环境中同时满足高速、低速、悬停等实际工作需求,具有较强的机动性和平稳性;
23.5、本发明采用模块化设计,可实现搭载多种水下探测器,使其制造、维修成本大大降低,结构更加简单便于装拆,方便运输携带。
附图说明
24.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
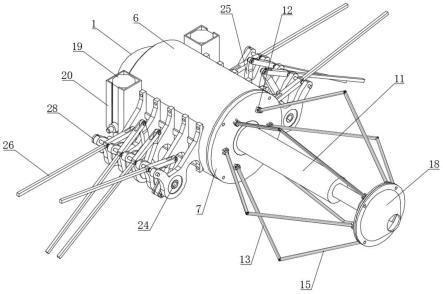
25.图1为仿生乌贼水下工作平台装置的整体结构示意图;
26.图2为核心舱的结构示意图;
27.图3为尾部反冲推进机构的结构示意图;
28.图4为侧翼悬浮机构的结构示意图;
29.图5为侧翼支架的结构示意图;
30.图6为曲轴组件、侧翼模块、摇杆支架的装配图;
31.图7为曲轴组件的结构示意图。
32.图标:1-半球形前罩;2-前端盖;3-前端盖密封圈;4-密封盖;5-密封盖密封圈;6-舱体;7-后端盖;8-套筒;9-后端盖密封圈;10-套筒密封圈;11-电动推杆;12-铰链ⅰ;13-第一连杆;14-铰链ⅱ;15-第二连杆;16-铰链ⅲ;17-后支架;17.1-扇形孔;18-喷嘴;19-水泵;20-水泵支架;21-扇叶;22-侧翼支架;22.1-曲轴安装孔;22.2-摇杆安装孔;23-轴承;24-曲轴组件;24.1-第一曲臂;24.2-第二曲臂;24.3-连接销;25-侧翼连杆;26-侧翼摇杆;27-铰链ⅳ;28-摇杆支架。
具体实施方式
33.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.实施例1
35.本发明提供一种仿生乌贼水下工作平台装置,包括核心舱、尾部反冲推进机构、侧翼悬浮机构和平台控制系统。
36.核心舱内部中空,核心舱包括半球形前罩1、前端盖2、前端盖密封圈3、密封盖4、密封盖密封圈5、舱体6、后端盖7、套筒8、后端盖密封圈9、套筒密封圈10;舱体1中间为圆柱形空腔,用于安装平台控制系统,如电池等元器件,两侧为平面,用于安装侧翼悬浮机构;半球形前罩1密封安装于舱体6的前端;前端盖2嵌入舱体6的前端,前端盖2与舱体6接触面上设置有密封槽并加装前端盖密封圈3,前端盖2的中心开设中心孔,使舱体6与半球形前罩1连通,可用于舱体6内部各电子器件的检查维修以及电池的充电等,中心孔上设置有密封盖4,密封盖4与中心孔接触面上设置有密封槽并加装密封盖密封圈5;后端盖7嵌入舱体6的后端,中心开设中心孔,后端盖7与舱体6接触面上设置有密封槽并加装后端盖密封圈9;套筒8穿过后端盖7的中心孔,接触面上设置有密封槽并加装套筒密封圈10。尾部反冲推进机构设置在核心舱的尾部,用于提供向前的推进力。尾部反冲推进机构包括电动推杆11、骨架模块、后支架17、喷嘴18;电动推杆11的前端密封固定于套筒8中,后端与后支架17的中心固接;骨架模块包括多根骨架以及储水腔膜;多根骨架沿电动推杆11的圆周方向均匀布置,每根骨架由第一连杆13与第二连杆15通过铰链ⅱ14铰接构成,第一连杆13的前端与后端盖7通过铰链ⅰ12铰接,第二连杆15的后端与后支架17通过铰链ⅲ16铰接;储水腔膜覆盖在多根骨架上形成储水腔;通过控制电动推杆11的运动改变骨架模块的姿态,控制储水腔的容积,通过控制储水腔容积的大小及容积改变的速率控制尾部反冲推进系统的推进速率;后支架17上设置多个绕中心均匀分布的通孔,本实施例采用扇形孔17.1,储水腔喷出的水流经过后支架17上的通孔流入喷嘴18的空腔;喷嘴18固定设置在后支架17后侧,呈空心圆台状,顶端开口,汇聚空腔中的水流,可增大水流速度,控制水流向正后方喷出,加大后部推进机构的推进效率。
37.侧翼悬浮机构有两组,分别对称安装在核心舱的两侧;每组侧翼悬浮机构包括侧翼支架22、曲轴组件24、侧翼模块、摇杆支架28和侧翼驱动源;多组侧翼支架22等间隔固定在所述核心舱的外侧,侧翼支架22上设置有曲轴安装孔22.1和摇杆安装孔22.2;曲轴组件包括依次连接的多组曲拐,每组曲拐设置在相邻两组侧翼支架22之间,每组曲拐均包括l形曲臂和连接销24.3,两根l形曲臂相对设置且伸出端朝向外侧,由平行于伸出端的连接销24.3固定连接;相邻两组曲拐设置有相位差,前一曲拐的伸出端与后一曲拐的伸出端固定连接,连接处转动穿过曲轴安装孔22.1;第一组曲拐和最后一组曲拐的伸出端分别转动穿过第一组侧翼支架和最后一组侧翼支架的曲轴安装孔22.1;伸出端与曲轴安装孔22.1之间通过轴承23实现转动连接;摇杆支架28穿过摇杆安装孔22.2;侧翼模块包括多根侧翼以及覆盖在多根侧翼上的侧翼膜;每根侧翼由侧翼连杆25和侧翼摇杆26通过铰链ⅳ27铰接构成,侧翼连杆25转动穿过连接销24.3,侧翼摇杆26转动穿过摇杆支架28;侧翼驱动源与第一组曲拐或最后一组曲拐的伸出端连接,驱动曲轴组件24旋转,进而带动侧翼模块以预设相
位差上下摆动,实现乌贼侧鳍波动运动的模拟。
38.进一步地,侧翼驱动源包括水泵19、水泵支架20、扇叶21;扇叶21固定在第一组曲拐或最后一组曲拐的伸出端上;水泵支架20安装在核心舱外;水泵19安装在水泵支架20上,出水口朝向扇叶21,使喷出水流推动扇叶21转动,从而驱动曲轴组件旋转。
39.l形曲臂的伸出端可设置为圆形轴,圆形轴上设置键槽,前一曲拐的伸出端与后一曲拐的伸出端可通过连接套+键实现固定连接。为了简化结构,便于安装,本实施例中,l形曲臂分为第一曲臂24.1和第二曲臂24.2,第一曲臂24.1的伸出端为圆形轴,圆形轴上设置有非圆孔,第二曲臂24.2的伸出端为非圆型面,第一组曲拐和最后一组曲拐的伸出端为圆形轴,以便与曲轴安装孔22.1转动配合,具体连接方式为:第一组曲拐或最后一组曲拐由两根第一曲臂24.1和连接销24.3连接而成,剩余曲拐由第二曲臂24.2、连接销24.3和第一曲臂24.1连接而成,相邻两组曲拐通过非圆型面和非圆孔插接从而将多组曲拐依次连接起来。
40.进一步地,相邻曲拐间设置有90
°
相位差。
41.平台控制系统密封安装在核心舱内,用于控制尾部反冲推进机构和侧翼悬浮机构,包括锂电池组、arduino uno开发板、电机驱动板、dc-dc降压稳压模块。
42.实施例2
43.本实施例提供一种仿生乌贼水下工作平台装置的控制方法,采用上述仿生乌贼水下工作平台装置进行侧翼悬浮及转向调节,包括下述步骤:
44.控制水泵19喷出水流推动扇叶21缓速转动,驱动曲轴组件24旋转,进而带动侧翼模块以预设相位差上下摆动,实现乌贼侧鳍波动运动的模拟,控制两侧曲轴组件24以相同的转速工作,两侧侧翼模块的波动频率相等,可实现悬浮运动;
45.在保持相对平衡的基础上,控制两侧水泵19的电机以不同转速运行,进而控制两侧曲轴组件24使其存在转速差,曲轴组件24转速高的一侧,侧翼模块波动频率高,波动角度更替更频繁,产生更多的涡流提供推动力,仿生乌贼水下工作平台装置将向曲轴组件24转速低的一侧转向,两侧曲轴组件24转速差越大则转向角度越大,转速差越小则转向角度越小,通过控制两侧曲轴组件24的转速控制转向时间。
46.如左侧水泵19的电机转速高,则左侧的侧翼模块波动频率高,实现右转向,右侧水泵19的电机转速根据转向角度的需要进行控制。左转向控制同理。
47.实施例3
48.本实施例提供一种仿生乌贼水下工作平台装置的控制方法,采用上述仿生乌贼水下工作平台装置进行尾部反冲运动,包括下述步骤:
49.控制电动推杆11低速收缩,使储水腔缓慢舒张,第一连杆13与第二连杆15所呈夹角逐渐减小,储水舱的容积逐渐增大,水通过喷嘴18以及后机架17的通孔被缓慢吸入储水腔,进行反冲运动的第一阶段,即储水蓄力,当电动推杆11收缩到最短时,第一连杆13与第二连杆15所呈夹角约为45
°
储水腔容积达到最大值;
50.控制电动推杆11高速推出,使储水腔快速收缩,第一连杆13与第二连杆15所呈夹角逐渐增大,储水舱的容积逐渐减小,水通过后机架17的通孔以及喷嘴18快速喷出,在水的反作用力下仿生乌贼水下工作平台装置快速向前运动,进行反冲运动的第二阶段,即喷水前进,当电动推杆的行程达到最大值时,第一连杆13与第二连杆15所呈夹角略小于180
°
,储
水舱的容积达到最小值,至此一个完整的尾部反冲运动完成。
51.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1