一种新型水下滑翔机器人
1.本发明属于水下滑翔机器人的技术领域,具体涉及一种新型水下滑翔机器人。
背景技术:
2.目前市面上所设计的水下机器人多为全驱,要达到六自由度一般至少需要5-8个推进器为水下机器人提供动力,由于多个推进器同时工作时所需功率较大,这使得水下机器人需要较大的封闭空间来放置储能设备,同时对电池的选取也带来挑战。其次,目前市面上的欠驱动水下滑翔机器人(underwater glider,ug)多为简易的单鱼雷状形状,通过依靠自身重力与浮力平衡关系推进的带翼无人水下航行器,其大多本身未采用螺旋桨等做主要驱动装置。
3.目前研究领域中,ug的滑翔和沉浮主要依靠自身重力与浮力平衡的关系推进带平衡翼的水下航行器进行前进。其中主要用于调节水下滑翔机重力与浮力关系的是安装于水下滑翔机内部的电池块相对整机位置发生变化从而改变其重心。其次,其依靠布置于一端的柔性囊调节排水的体积,实现上浮与下潜,利用机翼或机身内部可前后移动的质量滑块形成俯仰力矩。同时还有部分ug甚至可以在水面接收太阳能或在滑行过程中利用不同深度的海水温差产生能量。对于ug的转向方式主要有两种,一种是通过质量滑块的横向移动或不对称电池包的旋转形成横滚力矩,另一种是通过转向舵实现转向,导致ug在运动中必须通过上浮下潜才能前进及转向,显然其不具备后退功能,故在无强流干预的理想条件下,其运动路线为锯齿形(亦称为“之字形”)。
4.现有的水下滑翔机器人还更多的处在理论研究上,更多的学者还处于控制算法的研究上,此外,其本身较为简易的机械结构也导致了其自身的运动局限性等缺点。由于其控制较为局限导致要实现多自由度的运动较为困难。其次,由于一般只能靠频繁上下浮动进行前行,导致其行进速度受限。
技术实现要素:
5.本发明的目的在于针对现有技术中的上述不足,提供一种新型水下滑翔机器人,以解决现有水下滑翔机器人其简易的机械结构导致其自身运动局限性的问题。
6.为达到上述目的,本发明采取的技术方案是:
7.一种新型水下滑翔机器人,其包括主体框架组件、浮筒组件、导流板组件、储气罐组件和双尾舵组件;
8.主体框架组件包括左设备舱、右设备舱、位于左设备舱和右设备舱之间的方形设备舱;方形设备舱的后方连接有后甲板;后甲板上的两侧分别设有一个推进器;
9.浮筒组件包括四个浮筒,两个浮筒分别安装于左设备舱的两端,另外两个浮筒分别安装于右设备舱的两端;
10.方形设备舱两侧的导流板连杆滑槽中均安装有滑块组件,滑块组件与防水舵机同轴相连;且滑块组件与导流板组件滑动连接,滑块组件在导流板连杆滑槽中滑动以带动所
述导流板组件旋转运动;
11.储气罐组件包括储气罐主体;储气罐主体安装于方形设备舱的正上方,储气罐主体分别与四个浮筒连通;储气罐主体向浮筒中通高压气体,将浮筒中的水挤出,以改变水下滑翔机器人的浮力;
12.双尾舵组件与滑台气缸相连接,滑台气缸固定于后甲板上;滑台气缸滑动带动所述双尾舵组件摆动。
13.本发明提供的新型水下滑翔机器人,具有以下有益效果:
14.本发明利用携带储气设备的方式,通过充、放气可实现除后退之外的5个自由度的运动,其制作简单,同时也弥补了ug的运动局限性的缺点,配合控制系统,可实现多种运动方式的控制运动。
15.本发明增加了欠驱动水下航行器的运动自由度,使其可实现沉浮等运动,采用潜艇式沉浮原理,减少动力需求,增加了续航能力。结构上采用四个对称浮筒,可通过调节浮筒内气体体积实现机身的倾斜,从而在导流板的辅助下进行倾斜上浮或下沉运动,并且本发明的机整体结构采用圆桶状,在水中可起到减少阻力的作用,有较好的扩展性能,在前部流有拓展部分安装部位,方便后期改进。
附图说明
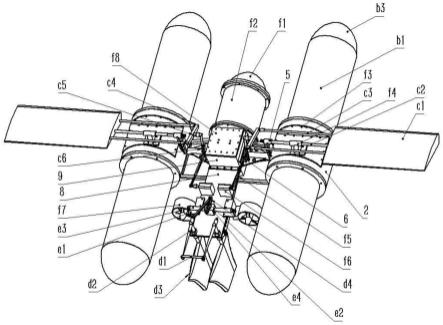
16.图1为本发明去除储气罐主体及托盘的整体结构侧部示意图。
17.图2为本发明控制系统原理框图。
18.图3为本发明主体框架组件的轴侧机构示意图。
19.图4为本发明滑块组件结构示意图。
20.图5为本发明浮筒组件中浮筒结构示意图。
21.图6为本发明导流板组件结构示意图。
22.图7为本发明双尾舵组件结构示意图。
23.图8为本发明滑台气缸结构示意图。
24.图9为本发明整体结构正下视示意图。
25.图10为本发明的整体结构正俯视示意图。
26.图11为本发明的整体机构正前视示意图。
27.图12为本发明的整体机构侧视示意图。
28.图13为本发明舵机动力传递结构图。
29.图14为本发明浮筒通气孔和通水孔位置图。
30.图15为本发明下沉作业图。
31.图16为本发明下沉水中滑翔作业图。
32.图17为本发明上浮作业图。
33.图18为本发明上浮水中滑翔作业图。
34.图19、20为本发明水下改变方向作业图。
35.图21为本发明主体框架组件正前视示意图。
36.图22为本发明主体框架组件后侧视示意图。
37.图23为本发明侧部设备舱舱盖示意图。
38.图24为本发明储气罐托盘示意图。
39.图25为本发明中间设备舱舱盖-托盘-储气罐配合示意图。
40.图26为本发明主体框架后甲板结构具体示意图。
41.图27为本发明主体框架后甲板部分结构放大示意图。
42.图28为本发明下部轴承托整体结构示意图。
43.图29为本发明去除附加舱的整体结构示意图。
44.图30为本发明的整体结构斜侧面示意图。
45.其中,1、连接孔;2、导流板旋转支架;3、方形舱盖安装位;4、半圆形舱盖安装位;5、旋转支架;6、导流板连杆滑槽;7、轴承安装孔;8、后甲板;9、方形设备舱;10、外部连接孔;11、连接管;12、筋;14、方形舱盖
46.a1、圆柱形滑块;a2、导流板连接端;a3、舵机连接端;
47.b1、气舱;b2、密封圈凹槽;b3、导流罩;b4、通气孔;b5、螺栓孔;b6、通水孔;
48.c1、导流板机翼;c2、导流板旋转轴;c3、横向连杆;c4、连杆销;c5、连杆固定孔;c6、导流板滑槽;
49.d1、双尾舵连杆;d2、双尾舵摆臂;d3、主尾舵;d4、双尾舵滑动杆;
50.e1、支撑底座;e2、气缸滑槽;e3、滑台气缸;e4、气缸滑块;
51.f1、半球罩;f2、附加舱;f3、半圆形舱盖;f4、旋转轴支架;f5、舵机多连杆;f6、防水舵机;f7、推进器;f8、中间设备舱舱盖;
52.g1、气孔;g2、储气罐主体;g3、固定位;g4、双尾舵下部轴承托;g5、托盘;g6、下部轴承托固定位;g7、锲形块;g8、两端螺纹孔;g9、圆柱孔;g10、托盘连接舱盖螺栓孔;g11、托盘凹槽;
53.h1、调节孔;h2、固定销;h3、舵机旋转轴;p1,浮筒。
具体实施方式
54.下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
55.实施例1,参考图1,本方案的新型水下滑翔机器人,利用潜水瓶的高压储气功能,采用潜艇上潜下沉原理,同时也参考了大型鱼类的倾斜上浮和下沉方式,其次,利用双尾舵及侧导流平衡板为水下滑翔机器人提供转向和调整平衡,使得本发明机器人能够进行水下五个自由度的运动的同时,无需过多推进器及较大储电设备就能实现多自由度运动和较好的续航能力,其具体包括:
56.主体框架组件、浮筒组件、导流板组件、储气罐组件和双尾舵组件,其中,浮筒组件、导流板组件、储气罐组件和双尾舵组件均安装于主体框架组件上。
57.主体框架组件;
58.主体框架组件采用对称的结构,其包括左设备舱、右设备舱、位于左设备舱和右设备舱之间的方形设备舱9;方形设备舱9的后方连接有后甲板8,后甲板8上的两侧分别设有一个推进器f7。
59.左设备舱和右设备舱上设有方形舱盖安装位3和半圆形舱盖安装位4,用于安装方形舱盖14和半圆形舱盖f3。方形设备舱9上设有中间设备舱舱盖f8,中间设备舱舱盖f8正上方通过螺栓固定一托盘g5。
60.如图21所示,导流板旋转支架2分别设置在左右设备舱靠中间方形设备舱9的一侧,在两侧设备舱与中间设备舱连接管11垂直正上方,将其上端圆柱形支架同导流板旋转轴支架f4的圆柱形支架在同一高度,并保持同轴心。旋转之间安装在两侧设备舱的舱盖上其目的是同导流板旋转轴支架f4一起用来支撑并固定导流板旋转轴c2。
61.如图22所示,两侧设备舱与中间设备舱连接管11左右两侧及正下方设置有三角形的筋12,起到加固两侧设备舱与中间设备舱连接管的作用,并在筋12上设置多个孔在保证其起到稳定作用的同时又具有经济性,减少不必要的耗材。
62.如图23所示,导流板旋转轴支架1设置在侧部设备舱方形舱盖14上方,两者通过螺栓固定。实际安装中,导流板旋转轴支架f4上端的圆柱体、导流板旋转支架2的圆柱体、导流板旋转轴c2三者保持同轴,导流板旋转轴c2在两圆柱体中进行滚动。
63.如图24和图25所示,为托盘g5及中间设备舱舱盖、托盘和储气罐三部分配合整体图,通过托盘连接舱盖螺栓孔g10将其固定在中间设备舱舱盖f8上。利用绷带等固定物可通过固定位g3将储气罐固定在托盘凹槽g11中。
64.位于中间的方形设备舱9前方添加一块圆形安装板,可利用此区域来添加摄像头、附加舱f2或添加压缩气囊等,其次便于后期的改进。方形设备舱9后方添加一块长甲板,即后甲板8,用来放置防水舵机f6以及连接和安装双尾舵和推进器f7;并在方形设备舱9两侧添加固定滑道,用于连接防水舵机f6和导流板组件,使其能够联动运动。
65.本实施例的主体框架组件为保持其刚性可将其组成为一个整体,即一体化成型,也可采用3d打印整体制作。
66.本实施例的左设备舱、右设备舱和方形设备舱9的舱内用来放置水下控制系统的硬件以及供电装置以及各类传感器,此处不再一一列举。
67.参考图3,左设备舱和右设备舱的两端均开设有连接孔1,该连接孔1用于连接浮筒;方形设备舱9上开设有外部连接孔10,用于连接半球罩f1或附加舱f2有关的电路和气路等。
68.后甲板8的螺栓孔用来固定舵机、气缸滑台、推进器。在后甲板8底部、左设备舱、右设备舱与方形设备舱9连接部分的加固结构表面添加多个孔,一方面在保证结构稳定的同时减少整机重量,另一方面,可达到减小水阻力的目的。
69.参考图5,浮筒组件包括四个浮筒p1,两个浮筒p1分别安装于左设备舱的两端,另外两个浮筒p1分别安装于右设备舱的两端。
70.浮筒p1包括气舱b1;气舱b1的前部为导流罩b3,导流罩b3为半球状;浮筒的尾部设有密封圈凹槽b2、至少一个通气孔b4、一个通水孔b6和至少一个适配连接孔1的螺栓孔b5;通气孔b4与储气罐连通。
71.参考图14,浮筒p1的下方开设有通水孔b6,通气孔b4起通气和排气的功能,通水孔b6起到排水和进水的作用。连接孔1是用来穿通气孔b4的通气管和通水孔b6的通水管,螺栓孔是周围密封垫外围的小孔。
72.本实施例优选四个浮筒p1内部总体积约为0.021195立方米,在所有浮筒p1都装满
压缩空气时,大约可提供20kg的浮力。气舱b1的前部为导流罩b3,形状参考鱼雷,可减少行进阻力。在实现上浮时,从储气罐主体g2中向浮筒p1中通高压气体,将浮筒p1中的水从通水孔b6挤出,实现增加浮力的目的。在浮筒p1另一端添加密封圈凹槽b2,使其具有较好的密封效果。浮筒组件整体结构采用亚力克材料制作,为一个整体结构。
73.参考图4和图13,滑块组件,在方形设备舱9两侧的导流板连杆滑槽6中均安装有滑块组件,滑块组件与舵机多连杆f5的一端同轴相连,且滑块组件与导流板组件滑动连接,滑块组件在导流板滑槽c6中滑动以带动导流板组件旋转运动。
74.具体的,滑块组件设于方形设备舱9侧壁的导流板连杆滑槽6内;滑块组件包括圆柱形滑块a1、导流板连接端a2和舵机连接端a3;圆柱形滑块a1可滑动的设于导流板连杆滑槽6内,并分别与导流板连接端a2和舵机连接端a3相连;导流板连接端a2和舵机连接端a3之间通过连接块相连;导流板连接端a2嵌入导流板组件中的导流板滑槽c6内;舵机连接端a3与舵机多连杆f5的一端相连,舵机多连杆f5另一端与防水舵机f6相连,防水舵机f6的舵机旋转轴h3与舵机连杆结构一端固定,舵机多连杆f5中的两部分通过调节孔h1和固定销h2配合连接。
75.参考图13,防水舵机f6固定在后甲板8上,防水舵机f6的舵机旋转轴h3与舵机连杆结构一端固定,舵机多连杆f5结构另一端又与舵机连接端a3相连。
76.其工作原理为:
77.舵机旋转轴h3旋转从而带动舵机多连杆f5摆动,舵机多连杆f5带动舵机连接端a3运动,由于滑块组件被固定在导流板连杆滑槽6中,从而在舵机多连杆f5的摆动下,滑块组件整体在导流板连杆滑槽6做相对的直线往复运动。导流板连接端a2镶嵌在导流板滑槽c6内,在滑块组件整体做直线运动的情况下,导流板连接端a2在导流板滑槽c6中滑动,而导流板机翼c1又可绕导流板旋转轴c2旋转,导流板滑槽c6所在连杆又与导流板机翼c1的两根横向连杆c3相连接,从而通过实现舵机旋转一定角度就可以带动导流板机翼c1旋转一定角度。
78.参考图6,导流板组件,导流板组件包括导流板机翼c1、导流板旋转轴c2、横向连杆c3和导流板连杆滑槽6;导流板旋转轴c2位于两根横向连杆c3之间,导流板旋转轴c2、两根横向连杆c3的一端均与导流板机翼c1连接,其另一端通过连杆销c4与导流板滑槽c6所在连杆相连。同时导流板组件还包括连杆固定孔c5,连杆销c4用于固定横向连杆c3。
79.在具体作业时,防水舵机f6作业带动舵机多连杆f5运动,舵机多连杆f5带动舵机连接端a3运动,进而带动圆柱形滑块a1在导流板连杆滑槽6内运动,以带动导流板连接端a2运动,进而带动导流板旋转轴c2旋转运动,即实现对导流板机翼c1的旋转运动。
80.本实施例通过控制两侧导流板机翼c1绕导流板旋转轴c2旋转不同角度,可实现滑翔机的转向、刹车、调节平衡,同时可在一定程度上起到平衡机身的功能。为保持其稳定性,导流板旋转轴c2以及导流板两侧的横向连杆c3都是与导流板机翼c1为整体。
81.参考图7,双尾舵组件,双尾舵组件与滑台气缸e3相配合,滑台气缸e3固定于后甲板8上,滑台气缸e3左右滑动带动双尾舵组件摆动。需要说明的是本实施例的滑台气缸e3为磁偶式无杆气缸。
82.具体的,双尾舵组件包括主尾舵d3和副尾舵;主尾舵d3和副尾舵分别与一根双尾舵摆臂d2相连,两根双尾舵摆臂d2之间通过双尾舵连杆d1相连;位于主尾舵d3上的双尾舵
摆臂d2的向前端斜方向延伸出双尾舵滑动杆d4。
83.本实施例双尾舵组件安装在双推进器f7的后方,利用其旋转带动ug实现偏航等功能。双尾舵连杆d1与两根双尾舵摆臂d2通过插销式结构连接,与双尾舵滑动杆d4的固定方式相同,都可通过开口销钉限制其脱落。
84.参考图8,滑台气缸e3固定于支撑底座e1上,支撑底座e1固定于后甲板8上;滑台气缸e3的两端均预留有通气孔,滑台气缸e3上设有气缸滑块e4,气缸滑块e4上设有气缸滑槽e2;双尾舵滑动杆d4嵌设于气缸滑槽e2内,气缸滑块e4左右移动以带动双尾舵滑动杆d4在气缸滑槽e2内作相对的上下滑动,进而带动双尾舵组件左右摆动。
85.参考图9~图12,储气罐组件包括储气罐主体g2与气孔g1;储气罐主体g2安装于方形设备舱9的正上方,储气罐主体g2中的压缩空气通过控制设备后分别与四个浮筒的通气孔b4连通;储气罐主体g2向浮筒中通高压气体,将浮筒中的水挤出,以改变水下滑翔机器人的浮力。储气罐主体g2放置于托盘凹槽g11中,托盘g5的两侧设有多个左右对称分布的固定位g3,通过固定位g3将储气罐主体g2固定于方形设备舱9的正上方;储气罐主体g2上设有气孔g1;其中,固定位g3的孔内部为螺纹孔,绑带在孔内处采用螺钉固定。
86.如图26所示,为主体框架后甲板结构具体结构,下部轴承托固定位g6在后甲板的位置相对轴承安装孔7留有一定空间,此空间用来安装下部轴承托整体结构,从而保持后甲板的上端轴承安装孔7与双尾舵下部轴承托g4的轴承安装孔保持同轴,并在空间上上下分布,这样可以使双尾舵固定更牢固。
87.如图27和图28所示,双尾舵下部轴承托g4上的锲形块g7与其下部轴承托固定位g6都设计为锲形,锲形块g7上同样设置有多个圆柱孔g9对应连接下部轴承托固定位g6上的螺纹孔,用来固定并可调节双尾舵下部轴承托g4的上下位置。通过两端螺纹孔g8将双尾舵下部轴承托g4固定在锲形块g7上。
88.本实施例的储气罐组件为四个浮筒提供足够压力的气体的同时,其本身也可为整个机身提供一定的浮力。储气罐主体g2采用市面上约12l的潜水瓶,最大可承受30mpa的气压,在实际应用中为避免发生爆炸等一般达到一半即15mpa气压即可。由于储气罐主体g2在使用时压力较大,所以需要在储气罐主体g2的气孔g1上安装一减压阀,使其能够保持在各设备和通气管道所能承受的安全压力范围。
89.本实施例采用双推进器f7为其提供主要动力,通过控制防水舵机f6旋转和滑台气缸e3左右滑动可分别实现对导流板组件和双尾舵组件的控制。左右两侧分别采用正反桨推进器f7,舵机采用市面上的防水舵机f6,通过控制其旋转角度可间接控制两侧导流板机翼c1的旋转角度。
90.将主尾舵d3、副尾舵相连,然后利用气缸滑块e4的运动带动双尾舵滑动杆d4在气缸滑槽e2中滑动,从而带动双尾舵摆动。双尾舵首先通过一个可拆卸旋转轴承进行固定,可拆卸的轴承安装在双尾舵下部轴承托g4中。其次,在后甲板8末端的轴承安装孔7中也添加旋转轴承来加固双尾舵,轴承采用防水的陶瓷轴承。为充分利用储气罐主体g2能够提供足量压缩空气的优点,利用滑台气缸e3做驱动从而代替电动舵机等。滑台气缸e3的两端留有通气孔,将其上部的滑块设计一气缸滑槽e2,气缸滑块e4通过左右运动带动主尾舵d3的双尾舵滑动杆d4进行左右移动,进而带动双尾舵整体运动。其中主尾舵d3的双尾舵滑动杆d4与气缸滑块e4上的气缸滑槽e2通过插销进行约束。
91.半球罩f1及扩展部分:位于中间的方形设备舱9前方添加一块圆形安装板,可利用此区域来添加摄像头、附加舱f2或添加压缩气囊等。当三个设备舱空间不充裕时,在圆形安装板上先添加附加舱f2,然后在其前端再安装摄像头半球罩f1,半球罩f1内安装摄像头;此部分用于放置前端摄像头及亚克力材质的半球罩f1,同时可连接同直径大小的附加设备舱。在已有设备舱不够储存控制设备时,可添加一个附加舱f2并在附加舱f2末端加半球罩f1,即可实现拓展功能。此外,也可为加装各种外接传感器提供充裕的安装空间。
92.参考图2,控制系统包括树莓派和与树莓派相连的stm32驱动控制板;stm32驱动控制板分别与充气电磁阀、进水电磁阀、气缸电磁阀、备用电磁阀、防水舵机f6和电调电性连接;电调与推进器f7相连;树莓派通过分别与摄像头和水下的电力载波板相连;水下的电力载波板与岸上的电力载波板相连,岸上的电力载波板与监控端的上位机连接。
93.充气电磁阀用于控制浮筒的通气孔b4的通气和放气,进水电磁阀用于控制浮筒的通水孔b6的通水和放水;气缸电磁阀用于控制滑台气缸e3的两通气孔的通气,从而实现气缸滑块e4向相对于滑台气缸e3向其左端、右端以及中间三个位置移动,进而带动双尾舵组件右摆、左摆保持中立。
94.本实施例为动力系统提供两种控制方式(有线通讯和无线通讯两种控制方式)。利用树莓派做下位机,利用stm32来控制推进器f7和舵机运动,岸上的pc端作为上位机下发运动控制指令。无线通讯的情况下,保持上位机和下位机处于同一局域网内,在航行器上浮到水面的过程中可以实现间断性的通信,实现位置检测、运动指令下发等功能。上、下位机都采用ubuntu系统下开源的ros系统,利用其开源特性,能够在后期对此控制设计进行更多的设计和改进。
95.利用stm32控制电磁阀的开闭来控制给浮筒充气还是放气,以及为滑台气缸e3提供压缩空气。浮筒连接两个电磁阀,一个控制充气和放气,另一个控制出水和进水。滑台气缸e3连接两个电磁阀,控制滑台气缸e3的左右运动,从而带动双尾舵进行摆动。
96.同时安全起见,在气路中适当添加压力或流量检测传感器,当作业时,在检测到漏气时,切断对应气路,执行紧急上浮和报警。
97.实施例2,本实施例新型水下机器人采用水下滑翔机上浮-下沉的交错运动模式,不同于目前水下滑翔机的设计,本实施例在机身中加入了推进器f7和尾舵使得其运动更加灵活的同时,能够以较小角度下沉并前进较长距离后再进行上浮运动,这就使得其可以在水中快速的进行滑翔,下面将对具体运动场景的动作进行的举例说明:
98.下沉作业:
99.参考图15,当要下沉时使得滑翔机前端的两浮筒装水排气,此时浮筒上方的气舱b1通气孔b4打开排气,同时浮筒下方的通水孔b6打开进水,整个滑翔机重心朝前,呈现图14所示向前倾斜状态。待由于机身总浮力小于重力开始下明显下沉时,打开推进器f7,助力整机向水下运动,同时如图14所示调整导流板机翼c1向下倾斜,起到分流作用,使得滑翔机能够快速下潜。
100.下沉水中滑翔作业:
101.如图16所示,当下沉到一定深度后开始调整导流板机翼c1向上翘起,此时关闭推进器f7,整机将开始在水中无动力滑翔,由于之前有推进器f7提供动力此时依靠惯性还能保持较高速度向水下滑翔,此时调整导流板机翼c1向上,目的是起到导流作用,使得整个机
身将以较之前以较小角度进行下沉,此时将使得整个机身在水中主方向为向前的平滑滑翔,由此将使机器人向前前进较大距离。另外,待滑行一段距离后,打开推进器f7,滑翔机还可以达到较大距离的水中平移运动,重复上述动作,进行间接性开关推进器,可使得整机在水中下沉的同时大幅度向前运动。
102.在整个水下滑翔过程中,为了更好的实现水下长距离滑翔,可控制后面两个浮筒间接进水排气,此动作在开启推进器f7时进行,起到将重心向后移动的作用,可更好的配合水下滑翔机进行水下长距离滑翔。
103.上浮作业:
104.参考图17,在达到整机能够达到的最大深度时开始上浮,此时首先调整前后的浮筒开始通过浮筒的通气孔b4将储气罐中的高压气体向浮筒中充气,同时先打开前端浮筒下端的通水孔b6开始排水,一段时间后再开启后端两浮筒的通水孔b6和通气孔b4开始同时充气排水,等到传感器检测到滑翔机开始上浮时,表明此时浮力以大于重力,关闭所有浮筒上的通水孔b6和通气孔b4,将导流板向上翘起,开启推进器f7,水下滑翔机将在推进器的助力下开始调整机身向斜上方运动。
105.上浮水中滑翔作业;
106.参考图18,等到机身明显上浮向前翘起上浮时,开始进行同下沉水中滑翔类似的运动,此时只要开始上浮说明以及使得浮力大于重力,浮筒中未充满气体的部分将被用来实现“上浮水中滑翔”运动。
107.如图18所示,在上浮时要实现水中滑翔首先调整导流板机翼c1向下倾斜,通过控制前后端两浮筒间接性的打开和关闭通气孔b4和排水孔进行充气排水,配合间接性打开关闭推进器,通过上述三个动作,就可以使得水下滑翔机在水中进行较大距离的滑翔。
108.水下改变方向作业:
109.参考图19和图20,当在水中要实现向左转向时,如图19所示,通过储气罐主体g2向滑台气缸e3一端充气使得气缸滑块e4带动其上端气缸滑槽e2向相对机身正方向的右侧运动,从而带动双尾舵向左侧摆动。此时为减小转弯半径,调整左侧导流板机翼c1向下侧倾斜,右侧导流板机翼c1向上翘起,这样可以起到导流作用,使得机身迅速向左转弯。相反,要向右转向时将向滑台气缸e3另一端通气,使得气缸滑块e4向相反方向运动,带动双尾舵向右摆动,导流板机翼c1也同向左转向时相反,右侧导流板机翼c1向下倾斜,左侧导流板机翼c1向上翘起。
110.虽然结合附图对发明的具体实施方式进行了详细地描述,但不应理解为对本专利的保护范围的限定。在权利要求书所描述的范围内,本领域技术人员不经创造性劳动即可做出的各种修改和变形仍属本专利的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1