用于水下清洗机器人的高精度相对定位方法与流程
1.本发明属于海洋工程技术领域,涉及用于水下清洗机器人的高精度相对定位方法。
背景技术:
2.水下清洗机器人对船只进行海上船体外壳长时间连续清洗时,作业人员需要实时掌握水下机器人相对在清洗船只的具体位置点,以及航行轨迹,为水下机器人进行高精度人工操作和自动智能作业提供水下坐标参考,以达到高效清洗、降低运行成本的目的。
3.而现有水下清洗机器人吸附在清洗船只壳体水面以下长时间连续作业时,大多采用船载超短基线的定位方式,对水下清洗机器人进行水下坐标的定位,结合船载超短基线阵的空间绝对大地坐标,计算出水下清洗机器人在水下相对超短基线阵的空间绝对大地坐标,从而除了水声测量误差外,还不可避免会产生gps定位误差,及水声测量坐标与大地绝对坐标转换误差,特别是在海上无gps差分条件下,最终产生的水下目标实时定位精度的误差将在2米以上,难以达到水下清洗机器人对海上船体外壳无死角完全清理,会存在清理遗漏区域。
4.为解决该工程技术难题,本发明提出一种基于以船壳体自身结构尺寸,并设置船体固定声学位置参考点,结合作业船只船载同步式短基线定位系统,建立水下相对坐标空间系,消除了gps测量误差和坐标转换误差,从而实现水下清洗机器人在水下长时间连续作业时,提供水下高精度定位导航技术支持。
技术实现要素:
5.本技术的发明目的是解决在现有惯导技术,gps与水声测量技术结合难以实现水下清洗机器人长时间连续高精度定位跟踪需求,基于同步式快捷船载段基线系统,提出一种基于在船体外壳上设置固定基准点的新型水下高精度相对定位方法,本技术可以消除gps测量误差和坐标转换误差,无需惯导和gps设备辅助,可在复杂海况下实现水下机器人达到厘米级高精度定位导航,提升水下作业效率,降低作业成本。
6.为了完成本技术的发明目的,本技术采用以下技术方案:
7.本发明的一种用于水下清洗机器人的高精度相对定位方法,该方法用于工作母船上的水下清洗机器人定位,水下清洗机器人附着在工作母船的侧壁上,用于清洗工作母船的侧壁,在水下清洗机器人上装有第二同步声源,清洗船放置在工作母船附近的水中,在工作母船的船头或船尾侧壁上固定有第一同步声源,在清洗船上固定有第一短基阵元和第二短基阵元,第一短基阵元包括:第一阵架和第一短基线换能器,第一短基线换能器固定在第一阵架底端,第一阵架固定在清洗船侧壁;第二短基阵元包括:第二阵架和第二短基线换能器,第二短基线换能器固定在第二阵架底端,第二阵架固定在清洗船侧壁;第一短基线换能器和第二短基线换能器位于清洗船同一侧的相同水深处,第一短基线换能器和第二短基线换能器之间的垂直距离为a,其中:
8.用于水下清洗机器人的高精度相对定位方法包括:
9.(a)、计算出水下清洗机器人和第一同步声源在相对坐标系的坐标
10.以第一短基线换能器和第二短基线换能器的连线为x轴,以第一短基线换能器为原点,以垂直于x轴并且平行于水面的轴为y轴,建立x轴和y轴的相对坐标系,在该相对坐标系中,第一短基线换能器的坐标a1为(0,0),第二短基线换能器的坐标a2为(a,0),第一同步声源坐标α(x1,y1)分别到第一短基线换能器和第二短基线换能器的距离为ct1和ct2,其中c为声波在水中的传播速度,t1和t2分别为第一同声源发出的声波达到第一短基线阵元和第二短基线阵元的时间差,用以下公式实时计算第一同步声源的坐标α(x1,y1),同时第一同步声源向第一短基线换能器和第二短基线换能器以信标编码方式发出第一同步声源的深度z1;
[0011][0012]
第二同步声源的坐标β(x2,y2)分别到第一短基线换能器和第二短基线换能器的距离为ct3和ct4,其中c为声波在水中的传播速度,t3和t4分别为第二同步声源发出的声波达到第一短基线换能器和第二短基线换能器的时间差,用以下公式实时计算出第二同步声源的坐标β(x2,y2),同时第二同步声源向第一短基线换能器和第二短基线换能器以信标编码方式发出第二同步声源的深度z2;
[0013][0014]
(b)、画出水下清洗机器人的运动轨迹
[0015]
以第一同步声源α(x1,y
1,
z1)为原点,以通过上述原点并且平行于相对坐标系x轴的轴线为x’轴,以通过上述原点并且平行于相对坐标系y轴的轴线为y’轴,以垂直于上述x’和y’平面的轴为z’轴,建立x’、y’和z’绝对坐标系,实时计算出水下清洗机器人在绝对坐标系中的坐标β(x
2-x1,y
2-y
1,z2-z1),在上述绝对坐标系中画出水下清洗机器人的运动轨迹。
[0016]
本发明的用于水下清洗机器人的高精度相对定位方法,其中:所述第一短基阵元和第二短基阵元固定在工作母船和清洗船之间的清洗船侧壁上。
[0017]
本发明的用于水下清洗机器人的高精度相对定位方法,其中:所述第一同步声源通过其磁性底座固定在工作母船的船艏或船尾壳体上。
[0018]
基于固定在清洗船只壳体两个信标位置点(基准点)不变的情况下,结合清洗船只吃水深度、长度和宽度,建立水下清洗机器人在清洗船只外壳船体上相对两个固定信标位置(基准点)的相对坐标位置。可得到出每个测量周期时,水下清洗机器人在水下清洗外壳船体相对两个固定信标位置(基准点)的三维空间位置,通过水下长时间测量周期的相对于工作母船位置汇总统计,即可获得水下洗机器人相对于的空间实时位置变化,同时显示记录水下清洗机器人在工作母船壳体上清洗轨迹。
[0019]
本发明的用于水下清洗机器人的高精度相对定位方法与传统的水下声学定位+gps方式相比,具有以下技术和工程优势:
[0020]
(1)、该方案利用清洗船上的固定点(基准点)作为基准,对水下清洗机器人进行定
位,结合已工作母船结构尺寸建立的相对坐标体系,参考固定基准点进行相对坐标系和绝对坐标系的转换。实现对水下清洗机器人相对清洗船的2个基准位置点进行相对定位和航迹标注,可消除传统测量方式的gps,消除了测量固有误差和水下与水面坐标转换误差,提升系统定位精度。
[0021]
(2)、该方案利用简易式同步式短基线2元定位+相对基准位置原理,除了安装结构简单,可快速布放回收和成本较低工程应用优势外,在同一周期内,可有效降低由海上风浪引起的清洗船只和工作明船晃动引起的基阵姿态和航向影响,可满足海上复杂海况下实际作业测量需求。
附图说明
[0022]
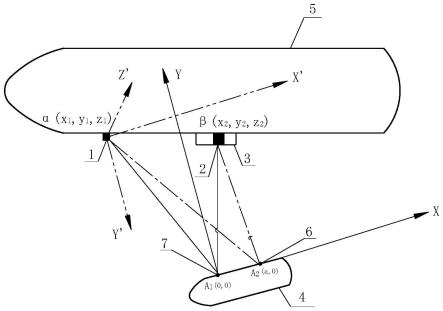
图1为在本技术的用于水下清洗机器人的高精度相对定位方法中,工作母船、水下清洗机器人和清洗船之间关系的俯向示意图,在图中,x和y为相对坐标系,x’、y’和z’为j绝对坐标系;
[0023]
图2为在本技术的用于水下清洗机器人的高精度相对定位方法中,工作母船、水下清洗机器人和清洗船之间关系的正向示意图,为了清楚起见,第一短基阵元和第二短基阵元画在清洗船外侧,实际上,第一短基阵元和第二短基阵元在工作母船和清洗船之间的清洗船侧壁上。
[0024]
在图1和图2中,标号1为第一同步声源;标号2为第二同步声源;标号3为水下清洗机器人;标号4为清洗船;标号5为工作母船;标号6为第一短基阵元;标号7为第二短基阵元;标号61为第一阵架;标号62为第一短基线换能器;标号71为第二阵架;标号72为第二基线换能器。
具体实施方式
[0025]
如图1和图2所示,本发明的用于水下清洗机器人的高精度相对定位方法用于工作母船5上的水下清洗机器人3定位,水下清洗机器人3通过其磁性底座固定在工作母船5的侧壁上,用于清洗工作母船5的侧壁,在水下清洗机器人3上装有第二同步声源2,清洗船4放置在工作母船5附近的水中,在工作母船5的船头或船尾侧壁上固定有第一同步声源1,在清洗船4上固定有第一短基阵元6和第二短基阵元7,第一短基阵元6包括:第一阵架61和第一短基线换能器62,第一短基线换能器62固定在第一阵架61底端,第一阵架61固定在清洗船4侧壁;第二短基阵元7包括:第二阵架71和第二短基线换能器72,第二短基线换能器72固定在第二阵架71底端,第二阵架71固定在清洗船4侧壁;第一短基阵元6和第二短基阵元7固定在工作母船5和清洗船4之间的清洗船4侧壁上,它们位于清洗船4同一侧的相同水深处,第一短基线换能器62和第二短基线换能器72之间的垂直距离为a。
[0026]
用于水下清洗机器人的高精度相对定位方法包括:
[0027]
(a)、计算出水下清洗机器人3和第一同步声源1在相对坐标系的坐标
[0028]
以第一短基线换能器62和第二短基线换能器72的连线为x轴,以第一短基线换能器62为原点,以垂直于x轴并且平行于水面的轴为y轴,建立x轴和y轴的相对坐标系,在该相对坐标系中,第一短基线换能器62的坐标a1为(0,0),第二短基线换能器72的坐标a2为(a,0),第一同步声源1坐标α(x1,y1)分别到第一短基线换能器62和第二短基线换能器(72)的
距离为ct1和ct2,其中c为声波在水中的传播速度,t1和t2分别为第一同声源1发出的声波达到第一短基线阵元62和第二短基线阵元72的时间差,用以下公式(1)实时计算第一同步声源1的坐标α(x1,y1),同时第一同步声源1向第一短基线换能器62和第二短基线换能器(72)以信标编码方式发出第一同步声源1的深度z1;
[0029]
根据距离公式
[0030]
可以推导出公式(1)和公式(2)
[0031][0032]
第二同步声源2的坐标β(x2,y2)分别到第一短基线换能器62和第二短基线换能器72的距离为ct3和ct4,其中c为声波在水中的传播速度,t3和t4分别为第二同步声源3发出的声波达到第一短基线换能器62和第二短基线换能器72的时间差,用以下公式2实时计算出第二同步声源2的坐标β(x2,y2),同时第二同步声源2向第一短基线换能器62和第二短基线换能器72以信标编码方式发出第二同步声源2的深度z2;
[0033][0034]
(b)、画出水下清洗机器人3的运动轨迹
[0035]
以第一同步声源1α(x1,y
1,
z1)为原点,以通过上述原点并且平行于相对坐标系x轴的轴线为x’轴,以通过上述原点并且平行于相对坐标系y轴的轴线为y’轴,以垂直于上述x’和y’平面的轴为z’轴,建立x’、y’和z’绝对坐标系,实时计算出水下清洗机器人3在绝对坐标系中的坐标β(x
2-x1,y
2-y
1,z2-z1),在上述绝对坐标系中画出水下清洗机器人3的运动轨迹,可以清楚地看出水下清洗机器人3在工作母船5的侧壁的轨迹,知道水下清洗机器人3清洗了工作母船5的侧壁的哪个位置。
[0036]
船载同步式短基线基阵2个接收阵元使用金属刚性连接杆,通过向下安装固定在工作母船5靠近海上作业船舷侧,每个接收阵元上有1个接收换能器,且换能器位于钛合金连接杆最下端,靠近海底,便于水下清洗机器人3船底作业定位测量。接收换能器连接电缆接入定位系统信号处理系统,实现显示位置信息。
[0037]
本发明还可以有其他多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员可以根据本发明作出各种相应的改变和变形,但这些改变和变形都应属于本发明的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1