基于水下声呐定位的船舶清洗方法、系统及介质与流程
本发明涉及船舶智能清洗,尤其涉及一种基于水下声呐定位的船舶清洗方法、系统及介质。
背景技术:
1、海洋中生活有多种生物,任何与海水接触的物体,如水下管路、采油平台导管架、浮标、岸堤、船舶、fpso(floating production storage and offloading,浮式储油卸油装置)等设备长期与海水接触,即使表面涂有防污漆(带有毒性的防腐漆释放出的有毒物质会通过食物链影响整个生态圈环境的安全),一段时间后设备的表层仍然会附着生产海洋生物,海洋中大约有4000-5000种污损生物,常见的有50-100种,主要包括:藤壶、贝类、多毛类、苔藓虫、腔肠动物、藻类等,尤其对于船舶及fpso(floating production storage andoffloading,浮式储油卸油装置)等设备而言,在设备表层大面积的附着海生物给设施安全运行造成了严重威胁。
2、对于海洋船舶而言,船舶表层附着的海洋生物会增加船舶的航行阻力,主要原因为附着生物改变了船体流线型外形,同时增加了船体负重;其次,附着生物会破坏被附着物表面的防腐涂层,造成船舶表层的防污漆脱落,使得被附着面金属暴露而受到海水腐蚀,造成危险;并且海洋水生生物会阻塞水下设施,降低设备运行效率,甚至发生危险。
3、目前对船体、fpso(floating production storage and offloading,浮式储油卸油装置)等大型设备表面附着的海生物清除方法主要采用上岸后依靠人工方式进行清理,设备上岸需要占用干船坞,导致清洁成本非常高,船舶清洁耗时较长,导致设备的误工时间长,使得综合清洗成本高昂。且人工铲除设备表层附着物的方法存在成本高、效率低下、效果不佳、破坏涂层等缺点。水下清洗的方法可以避免上坞,从而节省成本,但现有的水下清洗设备主要为摩擦式清洗机,利用物理作用对污染物进行刮擦,其缺点有设备庞大、设备成本高、作业强度大、效率低、对坚硬海生物清洗效果不佳、容易刮伤涂层等;而采用清洗机器人等自动化清洗设备进行船舶清洁时,依靠清洗机器人自身无法在水下进行准确定位,导致清洗机器人在清洗船舶过程中行走路线经常出现偏差、重复,影响了水下清洗机器人对船舶进行清洗的效率。因此,现有技术方法中用于船舶清洗的机器人存在因无法准确进行水下定位而影响清洗效率的问题。
技术实现思路
1、本发明实施例提供了一种基于水下声呐定位的船舶清洗方法、系统及介质,旨在解决现有技术中用于船舶清洗的机器人所存在的因无法准确进行水下定位而影响清洗效率的问题。
2、第一方面,本发明实施例提供了一种基于水下声呐定位的船舶清洗方法,该方法应用于船舶清洗系统中,所述船舶清洗系统包括清洗机器人、控制终端及装配于水下的多个声呐接收器,所述控制终端与所述清洗机器人及各所述声呐接收器同时建立网络连接以实现数据信息的传输,所述清洗机器人紧贴待清洗船舶的外壁进行行走并清洗船舶外壁,所述方法包括:
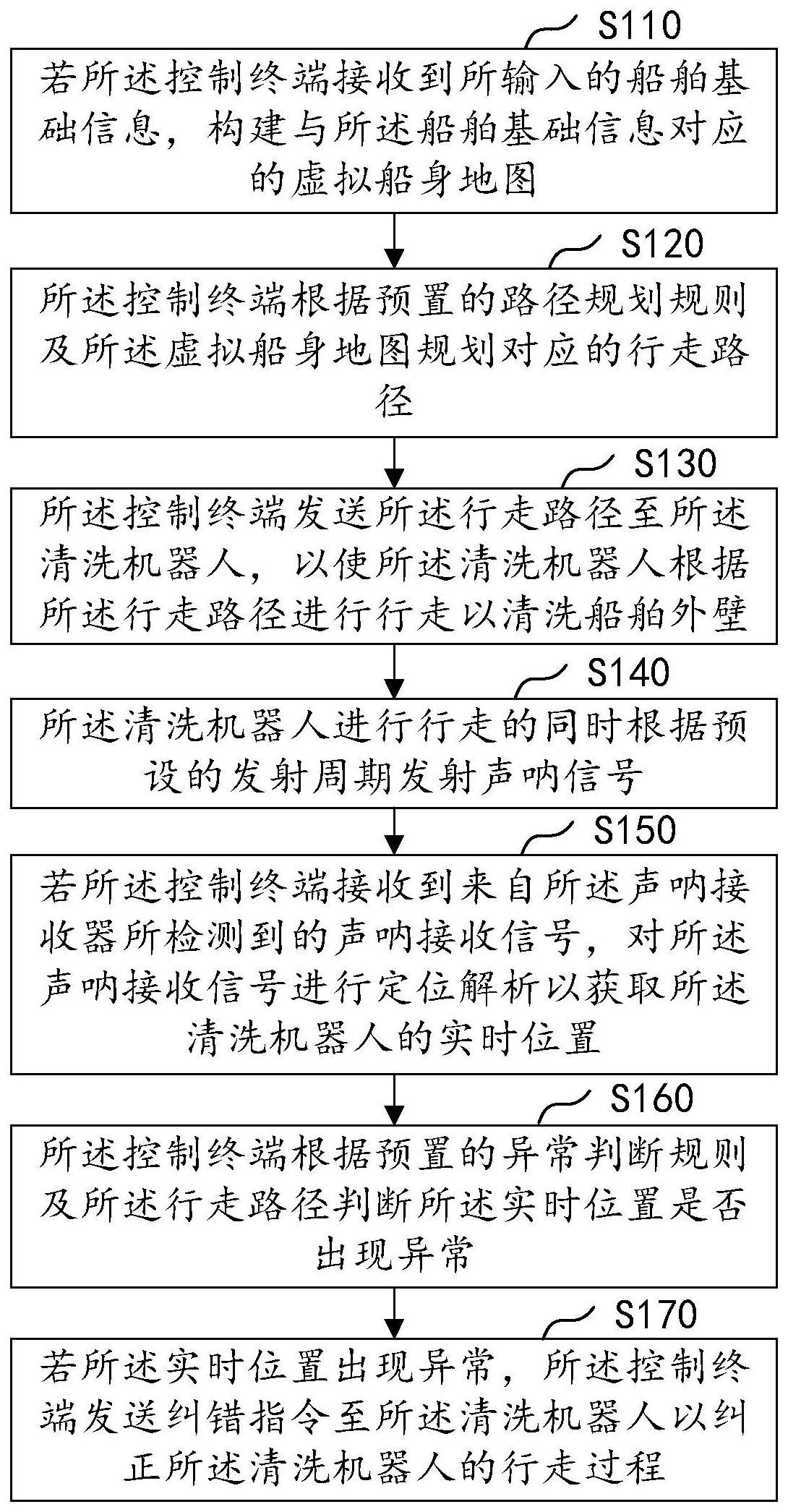
3、若所述控制终端接收到所输入的船舶基础信息,构建与所述船舶基础信息对应的虚拟船身地图;
4、所述控制终端根据预置的路径规划规则及所述虚拟船身地图规划对应的行走路径;
5、所述控制终端发送所述行走路径至所述清洗机器人,以使所述清洗机器人根据所述行走路径进行行走以清洗船舶外壁;
6、所述清洗机器人进行行走的同时根据预设的发射周期发射声呐信号;
7、若所述控制终端接收到来自所述声呐接收器所检测到的声呐接收信号,对所述声呐接收信号进行定位解析以获取所述清洗机器人的实时位置;
8、所述控制终端根据预置的异常判断规则及所述行走路径判断所述实时位置是否出现异常;
9、若所述实时位置出现异常,所述控制终端发送纠错指令至所述清洗机器人以纠正所述清洗机器人的行走过程。
10、第二方面,本发明实施例提供了一种基于水下声呐定位的船舶清洗系统,该系统包括清洗机器人、控制终端及装配于水下的多个声呐接收器,所述控制终端与所述清洗机器人及各所述声呐接收器同时建立网络连接以实现数据信息的传输,所述清洗机器人紧贴待清洗船舶的外壁进行行走并清洗船舶外壁;
11、所述系统包括配置于所述控制终端内的虚拟船身地图构建单元、行走路径规划单元、行走路径发送单元、实时位置获取单元、异常判断单元、纠错指令发送单元,配置于所述清洗机器人内的声呐信号发射单元;
12、所述虚拟船身地图构建单元,用于若接收到所输入的船舶基础信息,构建与所述船舶基础信息对应的虚拟船身地图;
13、所述行走路径规划单元,用于根据预置的路径规划规则及所述虚拟船身地图规划对应的行走路径;
14、所述行走路径发送单元,用于所述行走路径至所述清洗机器人,以使所述清洗机器人根据所述行走路径进行行走以清洗船舶外壁;
15、所述声呐信号发射单元,用于清洗机器人进行行走的同时根据预设的发射周期发射声呐信号;
16、所述实时位置获取单元,用于接收到来自所述声呐接收器所检测到的声呐接收信号,对所述声呐接收信号进行定位解析以获取所述清洗机器人的实时位置;
17、所述异常判断单元,用于根据预置的异常判断规则及所述行走路径判断所述实时位置是否出现异常;
18、所述纠错指令发送单元,用于若所述实时位置出现异常,发送纠错指令至所述清洗机器人以纠正所述清洗机器人的行走过程。
19、第三方面,本发明实施例又提供了基于水下声呐定位的船舶清洗系统,所述系统包括清洗机器人、控制终端及装配于水下的多个声呐接收器,所述清洗机器人包括第一存储器、第一处理器及存储在所述第一存储器上并可在所述第一处理器上运行的第一计算机程序,所述控制终端包括第二存储器、第二处理器及存储在所述第二存储器上并可在所述第二处理器上运行的第二计算机程序,所述声呐接收器包括第三存储器、第三处理器及存储在所述第三存储器上并可在所述第三处理器上运行的第三计算机程序,其特征在于,所述第一处理器执行所述第一计算机程序、所述第二处理器执行所述第二计算机程序以及所述第三处理器执行所述第三计算机程序时共同实现如上述第一方面所述的基于水下声呐定位的船舶清洗方法。
20、第四方面,本发明实施例还提供了一种计算机可读存储介质,其中,所述计算机可读存储介质存储有第一计算机程序、第二计算机程序及第三计算机程序,当所述第一计算机程序被第一处理器执行、所述第二计算机程序被第二处理器执行以及所述第三计算机程序被第三处理器执行时共同实现如上述第一方面所述的基于水下声呐定位的船舶清洗方法。
21、本发明实施例提供了一种基于水下声呐定位的船舶清洗方法、系统及介质。控制终端根据船舶基础信息构建虚拟船身地图,并进一步规划对应行走路径发送至清洗机器人,清洗机器人沿行走路径进行行走并按发射周期发射声呐信号,控制终端接收来自声呐接收器的声呐接收信号并解析获取清洗机器人的实时位置,判断实时位置是否出现异常,若出现异常控制终端发送纠错指令至清洗机器人。通过上述方法,通过水下声呐定位获取清洗机器人的实时位置,并在判断实时位置出现异常是发送纠错指令至清洗机器人,以实时纠正清洗机器人的行走路径,提高清洗机器人在进行水下清洗时行走的准确性,避免行走路径偏差、重复,从而提高清洗机器人进行水下清洗的效率。
- 还没有人留言评论。精彩留言会获得点赞!