一种非磁性船体附着海洋生物的清除结构及其使用方法与流程
本发明涉及,具体涉及一种非磁性船体附着海洋生物的清除结构及其使用方法。
背景技术:
1、海洋中的船体都会遇到小型水生物藤壶、海藻等附着问题,它们附着在船体表面会增大行驶阻力和腐蚀船体材料,造成能源浪费降低船体使用寿命,现很多港口提供船体表面水下清扫服务或定期坞修。由于人工智能的发展对于铁磁性材料船体尝试采用磁性履带机器人进行船体表面清除附着海洋生物,磁性履带机器人一旦出现断磁故障会发生掉落事故可靠性差,对于非铁磁性材料船体仍沿用定期坞修的方法,随着技术的进步非铁磁性材料如铝合金、钛合金等,非金属材料如木材、水泥、复合材料等大量应用船体,这些非磁性船体附着海洋生物如何不到坞修在海洋上就可进行清除船体附着海洋生物,从而节省资金和时间,现还没有可行的方法。
技术实现思路
1、针对现有技术的不足,本发明提供一种一种非磁性船体附着海洋生物的清除结构及其使用方法,在海洋上行驶过程中或停泊时,在船体外表面安装相关部件后可对非磁性船体和铁磁性船体自动清除船体外表面附着海洋生物,达到节省资金和时间的目的。
2、本发明是通过如下技术方案实现的:
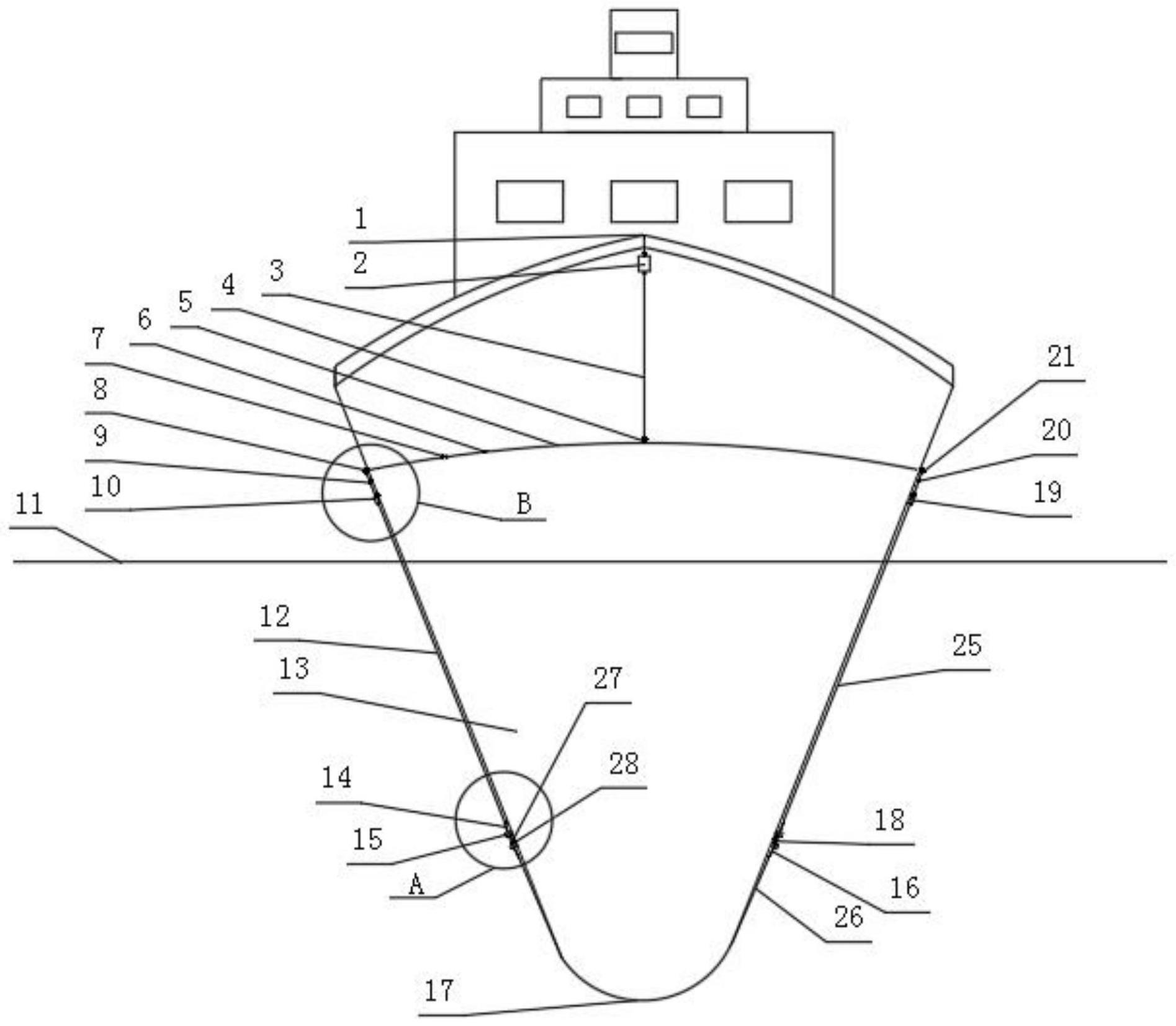
3、提供一种非磁性船体附着海洋生物的清除结构,包括贴附在船体两侧的履带式清除机器人a和履带式清除机器人b,两个履带式清除机器人的两侧均铰接有刚性三角框,
4、船体在船头和船尾分别固定设置有固定杆,船头固定杆通过吊绳安装电动葫芦d,船尾固定杆通过吊绳安装电动葫芦e,两个电动葫芦的吊绳d和吊绳e分别通过吊钩吊置有围设在船体外周的环形缆绳,环形缆绳上在船体一侧连接电动滑梭a并在船体的另一侧连接电动滑梭b,电动滑梭a下方通过吊绳串接拉力传感器a和电动葫芦a,电动滑梭b下方通过吊绳串接拉力传感器b和电动葫芦b,
5、电动葫芦a的吊绳a与履带式清除机器人a一侧的刚性三角框的顶角端连接,电动葫芦b的吊绳b与履带式清除机器人b一侧的刚性三角框的顶角端连接,
6、履带式清除机器人a另一侧的刚性三角框的顶角端与履带式清除机器人b另一侧的刚性三角框的顶角端之间通过绕设在船底的连接绳连接。
7、进一步的,还包括设置在船体内的显示plc控制器,显示plc控制器分别与电动滑梭a、拉力传感器a、电动葫芦a、履带式清除机器人a、履带式清除机器人b、电动葫芦b、拉力传感器b、电动滑梭b、电动葫芦d和电动葫芦e电连接。
8、显示plc控制器可放置在船上,对显示plc控制器输入各电控件控制程序和人工智能自适应学习软件及图像分析软件,可利用程序配合plc控制器对各个用电设备进行协调配合,实现整体的稳定运行。
9、进一步的,环形缆绳上串联一个拉力传感器c和张紧电动葫芦c,拉力传感器c和张紧电动葫芦c均与显示plc控制器电连接。
10、拉力传感器c和张紧电动葫芦c用于感知环形缆绳的张紧程度,保证其始终处于张紧状态,以保证两侧的履带式清除机器人可以紧贴船体表面进行工作。
11、进一步的,环形缆绳环绕船体外表面并位于海洋面以上。
12、进一步的,履带式清除机器人包括安装有履带传动机构的底盘,底盘上还安装有垂直轴伺服电机c,伺服电机c的轴c通过法兰和固定卡a固定有由伺服电机a驱动的水平电动缸a,电动缸a的伸缩缸a的端部通过法兰和固定卡b垂直连接有由伺服电机b驱动的垂直电动缸b,垂直电动缸b的顶部安装有监控摄像头a,电动缸b的伸缩缸b通过法兰盘连接有垂直轴伺服电机d,伺服电机d的轴d通过法兰盘连接有水平轴伺服电机e,伺服电机e的轴e通过轴座连接有切割电机,切割电机的外周径向均布固定四个监控摄像头b,切割电机的转动轴上安装有切割刀头。
13、作为优选,底盘在下表面四角均安装有与显示plc控制器电连接的水下距离传感器。
14、底盘下表面四角处各设有距离传感器,某个距离传感器的值大于其它三个值时某边传动履带的伺服电机工作,使四个距离传感器的值接近相同,由此确保两传动履带与船体外表面良好接触。
15、进一步的,底盘在宽度方向两侧各对称焊接两个半环,四个半环在同一水平面内,每个半环上均套有圆环,同侧两圆环与刚性三角框的两底端连接,圆环与半环之间构成铰链。
16、进一步的,电动滑梭包括矩形框和密封安装在矩形框上且用于供电的第一电池组,在矩形框的底部中心通过开设吊孔吊置有拉力传感器,拉力传感器下方吊置挂环,矩形框的内部转动安装有托轮,矩形框内部在托轮上方沿缆绳穿过方向前后依次转动安装有两个通过伺服电机h驱动的辊轮,矩形框的内部在两辊轮之间设置压板,压板通过与安装在矩形框顶部的伸缩机构连接可对缆绳施加摩擦力,矩形框在安装伺服电机h正对的另一侧上下通过螺栓各固定一轴座a,两轴座a之间安装一垂直轴a,垂直轴a的上部和下部各连接有一条形板,条形板正对矩形框一面在两端分别与矩形框之间连接有锥形压缩弹簧,两条形板在长度方向的两端分别通过垂直轴c连接,垂直轴c由固定在上条形板上的伺服电机i驱动,两垂直轴c的一端安装上轮且另一端安装下轮。
17、压板与缆绳接触的一面形成有与缆绳表面相配的弧形面并在弧形面上固定有阻尼耐磨层。
18、压板上设置弧形面,与缆绳形状相同,方便增大与缆绳之间的接触面积,压板与缆绳之间形成有阻尼耐磨层可用于对压板进行保护,阻尼耐磨层与缆绳接触后可提升摩擦力,保证刹车的稳定。
19、进一步的,辊轮通过轴h转动安装在矩形框上,伺服电机h安装在矩形框的侧面且伺服电机h的驱动轴与轴h通过联轴器连接。
20、辊轮通过轴h安装在矩形框上,通过伺服电机h对轴h进行驱动进而可驱动辊轮转动,实现整体的移动功能。
21、进一步的,上轮的直径小于下轮的直径。
22、通过设置直径大小不同的上轮和下轮,使得智能电控滑车在受力情况下可以紧贴船体外表面水平移动,提升整体的稳定性。
23、进一步的,托轮和辊轮的表面均设置有与缆绳形状相配的凹槽。
24、托轮和辊轮的表面均设置与缆绳相配的凹槽,可与缆绳稳定接触,凹槽容置缆绳,保证在缆绳上滚动的稳定性。
25、一种非磁性船体附着海洋生物的清除结构的使用方法,包括以下步骤:
26、s1、通过显示plc控制器的启动按钮使各电控部件进入工作状态,plc控制器控制电动葫芦d和电动葫芦e工作,使吊绳d和吊绳e达到编程设定长度,plc控制器控制张紧电动葫芦c工作使串联在环形缆绳上的拉力传感器c的压力值达到编程规定值;
27、s2、plc控制器控制电动葫芦a和电动葫芦b工作使拉力传感器a和拉力传感器b的压力值在达到编程设定范围内,以使履带式清除机器人a和履带式清除机器人b的履带紧贴船体外表面;
28、s3、履带式清除机器人a或履带式清除机器人b的底盘四角处各设有距离传感器,在某个距离传感器的值超出编程设定值时,plc控制器会控制履带移动可使各距离传感器均处于编程设定值;
29、s4、plc控制器控制履带式清除机器人a或履带式清除机器人b上的清除机构配合水下监控摄像头寻找并清除附着在船体外表面上的海洋生物,plc控制器根据各传感器数据情况实时控制电动滑梭a和电动滑梭b的移动及电动葫芦a和电动葫芦b相互工作保持履带式清除机器人紧贴船体外表面移动。
30、进一步的,plc控制器可控制履带式清除机器人a和履带式清除机器人b在船体外表面不对称作业。
31、plc控制器依据编程控制各电控件使履带式清除机器人a和履带式清除机器人b到达船体外表面更多的区域,这样就实现了清除非磁性和铁磁性船体附着海洋生物。
32、本发明的有益效果:
33、本发明在船头船尾各设固定杆和电动葫芦并吊置环形缆绳,在环形缆绳上装有电动滑梭a和b及压力传感器a和b及电动葫芦a和b,两履带式清除机器人a和履带式清除机器人b串联在电动葫芦a、b之间,履带式清除机器人a和履带式清除机器人b两侧都设有刚性三角框,清除机器人的底盘下表面四角各设有距离传感器,plc控制器控制各电控件实现履带机器人紧贴船体外表面行走,清除机器人上的清除机构在摄像头配合下可清除附着海洋生物,达到节省资金和时间目的。
34、电动滑梭可实现遥控或自控移动,将原滑车与船体外表面的滑动摩擦移动改为动力滚动,可在电动滑车下方吊置的机器人等装置实现作业连续性,该智能电控滑车可融入其他控制系统中,可代替无动力滑车用于多种作业场景提高工作质量和效率。
- 还没有人留言评论。精彩留言会获得点赞!