一种利用洋流推力运动的仿生水母机器人
1.本实用新型涉及海洋仿生机械技术领域,具体而言,涉及一种利用洋流推力运动的仿生水母机器人。
背景技术:
2.海洋环境非常复杂,在水下作业的过程中可能遇到各种困境,严重威胁作业人的人身安全,因此制造出可以代替人类从事恶劣环境下工作的仿生机器人,是十分有必要和有意义的。
3.仿生技术研究是当今机器人研究领域内的前沿课题,模拟各种生物在各种特定条件下的卓越功能,可以一定程度上代替人工作业。
4.然而现有的水下仿生机器人耗能较大,待机时间较短,需不断补充能源;其所利用的电能、燃油等能源泄漏问题一定程度上恶化海洋环境污染问题,加大解决海洋环境污染难度;且现有水下仿生机器人运动稳定性差,体积相对较大,一定程度上影响海洋生物活动,从而破坏海洋生态平衡。
技术实现要素:
5.本实用新型提供一种利用洋流推力运动的仿生水母机器人,用以克服现有技术中存在的至少一个技术问题。
6.为达到上述技术目的,本实用新型一种利用洋流推力运动的仿生水母机器人,包括:动力机构、传动机构和伸缩机构;
7.所述动力机构包括螺旋叶片、半球壳、底部密封圆盘以及转轴;所述螺旋叶片分布在所述半球壳上,所述半球壳与所述底部密封圆盘之间固定连接,所述底部密封圆盘中心与所述转轴隼合;
8.所述传动机构包括推杆和圆盘底座;所述推杆固定于圆盘底座底部,所述圆盘底座中心圆孔与所述转轴隼合;
9.所述伸缩机构包括推进叶片、上伸缩连杆、下伸缩连杆、上部连杆固定盘和下部连杆固定盘;所述上伸缩连杆的末端和所述下伸缩连杆的首端连接,其中两个连接处与所述推杆的一端连接,所述上伸缩连杆的首端与上部连杆固定盘的边缘连接,所述下伸缩连杆的末端与下部连杆固定盘的边缘连接。
10.可选的,所述螺旋叶片为六片,所述螺旋叶片均匀分布在所述半球壳上。
11.可选的,所述动力机构还包括发条;所述发条与所述转轴的末端连接。
12.可选的,所述传动机构还包括两个轴承座、第一连杆、两个u型连接件、曲柄、第二连杆、第三连杆和第四连杆;所述轴承座固定于所述圆盘底座底部的两端;所述转轴贯穿于所述圆盘底座中心圆孔;所述曲柄置于所述圆盘底座底部的中心位置,所述曲柄与所述转轴传动连接;所述第三连杆的第一端与所述曲柄连接;所述第三连杆的第二端与所述第一连杆的第一端以及所述第四连杆的第一端连接;所述第一连杆的第二端和所述第二连杆的
第一端连接,所述第一连杆的第二端和所述第二连杆的第一端的连接点固定于所述u型连接件中。
13.可选的,所述推杆的末端呈扁平状,所述推杆的首端穿过所述轴承座;所述推杆贯穿所述轴承座,所述推杆的首端连接所述u型连接件,所述推杆的末端固定于所述上伸缩连杆和所述下伸缩连杆的连接处。
14.可选的,所述传动机构还包括第一销钉;所述圆盘底座的中心位置设置有第一滑槽;所述第一滑槽呈一字状,所述第一滑槽的深度与所述圆盘底座的深度一致;所述u型连接件、所述第一连杆和所述第二连杆通过第一销钉固定连接于所述第一滑槽中,所述第一销钉可在所述第一滑槽中移动。
15.可选的,所述传动机构还包括第二销钉;所述圆盘底座的中心位置设置有第二滑槽,所述第二滑槽与所述第一滑槽垂直,形状一致;所述第三连杆、所述第一连杆和所述第四连杆通过第二销钉固定连接于所述第二滑槽中,所述第二销钉可在所述第二滑槽中移动。
16.可选的,所述推进叶片为柔性材料制成;所述推进叶片的形状为一端宽一端窄的葫芦状,靠近所述上伸缩连杆首端的一端为窄端,靠近所述下伸缩连杆首端的一端为宽端。
17.可选的,所述上部连杆固定盘的底部边缘设置有第一卡槽;所述下部连杆固定盘的顶部边缘设置有第二卡槽;所述上伸缩连杆的首端置于所述第一卡槽内;所述下伸缩连杆的末端置于所述第二卡槽内。
18.可选的,所述上部连杆固定盘的侧面一周设置有第一凹槽,所述第一凹槽内置有第一鱼线,所述第一鱼线穿过所述第一卡槽以及设置在所述上伸缩连杆首端处的小孔,以将所述上伸缩连杆的首端固定于设置在所述第一卡槽中的下部连杆固定盘上;所述下部连杆固定盘的侧面一周设置有第二凹槽,所述第二凹槽内置有第二鱼线,所述第二鱼线穿过所述第二卡槽以及设置在所述下伸缩连杆末端处的小孔,以将所述下伸缩连杆的末端固定于所述第二卡槽中。
19.本实用新型实施例的创新点包括:
20.1、本实用新型中的螺旋叶片,可以捕捉洋流产生的推力,从而为所述机器人提供源源不断的动力,减少回收频次;使所述机器人可长时间进行水下工作,解决了水下机器人供能问题。是本实用新型实施例的创新点之一。
21.2、本实用新型通过连杆结构实现动力多级传导,使仿生水母机器人运动的可靠性大大提高,是本实用新型实施例的创新点之一。
22.3、本实用新型中动力机构的螺旋叶片以及发条通过捕捉洋流产生的推力,为所述机器人提供动力,利用天然自然资源,减少向海洋里的污染排放。是本实用新型实施例的创新点之一。
23.4、本实用新型中动力机构,传动机构以及伸缩机构设计简单,且体积较小,不影响海洋生物活动,保持海洋生态平衡。是本实用新型实施例的创新点之一。
附图说明
24.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅
是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
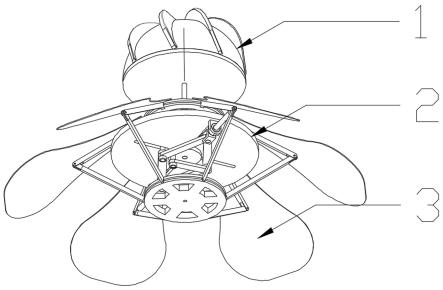
25.图1为本实用新型实施例提供的一种利用洋流推力运动的仿生水母机器人的整体结构示意图;
26.图2为本实用新型提供的一种利用洋流推力运动的仿生水母机器人的爆炸视图;
27.图3为1-动力机构部分结构示意图;
28.图4为2-传动机构部分结构示意图;
29.图5为3-伸缩机构部分结构示意图;
30.图中:1-动力机构,2-传动机构,3-伸缩机构,11-螺旋叶片,12-半球壳,13-底部密封圆盘,14-转轴,15-发条,201-推杆,202-轴承座,203-第一销钉,204-第一连杆,205-u型连接件,206-曲柄,207-第二连杆,208-第三连杆,209-第一滑槽,210-第二销钉,211-第三销钉,212-第二滑槽,213-圆盘底座,214-第四连杆,301-推进叶片,302-上伸缩连杆,303-下伸缩连杆,304-上部连杆固定盘和305-下部连杆固定盘。
具体实施方式
31.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
32.需要说明的是,本实用新型实施例及附图中的术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
33.本实用新型的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本实用新型中的具体含义。
34.实施例1:
35.本实施例提供一种利用洋流推力运动的仿生水母机器人,所述机器人包括动力机构、传动机构和伸缩机构;本实用新型中的螺旋叶片的设计,可有效捕捉利用海洋中洋流产生的自然推力。
36.参考图1-图5,图1为本实用新型实施例提供的一种利用洋流推力运动的仿生水母机器人的整体结构示意图,图2为本实用新型实施例提供的一种利用洋流推力运动的仿生水母机器人的爆炸视图,图3为1-动力机构部分结构示意图,图4为2-传动机构部分结构示意图,图5为3-伸缩机构部分结构示意图。如图1-5所示,本实施例提供的一种利用洋流推力运动的仿生水母机器人,包括动力机构1、传动机构2和伸缩机构3。
37.所述动力机构包括螺旋叶片11、半球壳12、底部密封圆盘13以及转轴14;所述螺旋
叶片11分布在所述半球壳12上,所述半球壳12与所述底部密封圆盘13之间固定连接,所述底部密封圆盘13中心与所述转轴14隼合;
38.所述传动机构包括推杆201以及圆盘底座213;所述推杆201固定于圆盘底座213底部,所述圆盘底座213中心圆孔与所述转轴14隼合;
39.所述伸缩机构包括推进叶片301,上伸缩连杆302,下伸缩连杆303,上部连杆固定盘304和下部连杆固定盘305;所述上伸缩连杆302的末端和所述下伸缩连杆303的首端连接,其中两个连接处与所述推杆201一端连接,所述上伸缩连杆302的首端与上部连杆固定盘304的边缘连接,所述下伸缩连杆303的末端与下部连杆固定盘305的边缘连接。
40.在具体实施过程中,均匀分布在所述半球壳12上的螺旋叶片11捕捉利用海洋中的自然洋流,带动半球壳12转动,保证所述仿生水母机器人在水中的动力。
41.可见,本实施例提供一种基于洋流推力运动的仿生水母机器人,通过均匀分布在所述半球壳上的螺旋叶片利用自然洋流产生的推力,为所述仿生水母机器人在水中前进提供动力,实现所述仿生水母机器人在水下不停歇地工作。此外,仿生水母机器人的体积较小,不影响海洋生物活动,保持海洋生态平衡,可以利用天然自然资源作为能源,减少海洋里的污染排放,极具环保作用。
42.实施例2:
43.本实施例又提供一种利用洋流推力运动的仿生水母机器人,所述机器人包括动力机构、传动机构和伸缩机构;所述动力机构中的螺旋叶片的设计,可有效捕捉利用海洋中洋流产生的自然推力;所述传动机构通过其中所述连杆结构实现动力多级传导,进而通过所述曲柄连杆机构巧妙地将圆周运动转化为直线运动,从而实现动力机构与伸缩机构的连接。
44.如图1-图5所示,本实施例提供的一种利用洋流推力运动的仿生水母机器人,包括动力机构1、传动机构2和伸缩机构3。
45.其中,参照图3,本实施例中,所述动力机构1包括螺旋叶片11、半球壳12、底部密封圆盘13、转轴14与发条15。
46.具体的,所述螺旋叶片11均匀分布在所述半球壳12上。
47.需要说明的是,所述螺旋叶片11可以是六片或者八片,所述螺旋叶片11均匀分布在所述半球壳12;所述半球壳12与所述底部密封圆盘13之间采用固定连接,所述底部密封圆盘13与所述转轴14之间固定连接,所述转轴14末端连接发条15。
48.需要说明的是,所述半球壳12为亚克力材质制成。
49.可以理解的,通过所述半球壳12和所述底部密封圆盘13的防水密封连接可以给所述仿生水母机器人提供一定的浮力,从而使所述仿生水母机器人在水中的运动更加灵活自主。
50.如图4所示,所述传动机构2包括两根推杆201、两个轴承座202、两个第一销钉203、第一连杆204、两个u型连接件205、曲柄206、第二连杆207、第三连杆208、第一滑槽209、第二销钉210、第三销钉211、第二滑槽212、圆盘底座213和第四连杆214。
51.具体的,所述转轴14贯穿于所述圆盘底座213中心圆孔;所述轴承座202固定于所述圆盘底座213底部两端;所述第一滑槽209呈一字状,位于所述圆盘底座213的中心位置,所述第一滑槽209深度与所述圆盘底座213一致;需要说明的是,两个所述轴承座202同所述
第一滑槽209在同一条直线上;所述第二滑槽212位于所述圆盘底座213的中心位置,所述第二滑槽212深度与所述圆盘底座213一致,所述第一滑槽209垂直,所述第二滑槽212形状与所述第一滑槽209一致;所述曲柄206置于所述圆盘底座213底部中心位置,可以理解的是,二者中心圆孔重合,所述曲柄206中心圆孔与所述转轴14传动连接;所述第三连杆208的第一端通过所述第三销钉211与所述曲柄206连接;所述第三连杆208的第二端通过所述第二销钉210与所述第一连杆204的第一端以及所述第四连杆214的第一端连接;可以理解的是,所述第二销钉210穿过所述第一连杆204的第一端处的圆孔、所述第四连杆214的第一端处的圆孔以及所述第三连杆208的第一端的圆孔;所述第二销钉210固定在所述第二滑槽212中;需要说明的是,所述第二销钉210可在所述第二滑槽212中移动;所述第一连杆204的第二端和所述第二连杆207的第一端用所述第一销钉203固定在所述u型连接件205中,所述第一销钉203贯穿所述u型连接件205、所述第一连杆204和所述第二连杆207,固定在所述第一滑槽209中,可在所述第一滑槽209中移动,所述推杆201的末端呈扁平状,所述推杆201的首端穿过所述轴承座202,所述推杆201贯穿所述轴承座202,所述推杆201的末端固定于所述u型连接件205。
52.如图5所示,所述伸缩机构3包括六片推进叶片301,六根上伸缩连杆302,六根下伸缩连杆303,上部连杆固定盘304和下部连杆固定盘305。
53.其中,所述上伸缩连杆302末端和所述下伸缩连杆303首端通过铰链连接;所述上部连杆固定盘304底部边缘均匀分布六个第一卡槽;可以理解的是,所述上伸缩连杆302与所述下伸缩连杆303连接处有六个,两个所述所述推杆201的第二端,分别固定于两个在一条直线的所述连接处;所述上部连杆固定盘304的侧面一周设置有第一凹槽;所述上伸缩连杆302的首端通过所述第一卡槽与所述上部连杆固定盘304连接;所述推进叶片301上半部分中心轴固定于所述上伸缩连杆302;可以理解的是,所述推进叶片301为柔性材料制成,例如硅胶板;所述推进叶片301形状为上窄下宽的葫芦状,靠近所述上伸缩连杆302首端一侧窄,靠近所述下伸缩连杆303首端一侧宽。
54.需要说明的是,所述第一凹槽内部置有第一鱼线,所述第一鱼线穿过所述第一卡槽以及所述上伸缩连杆302首端的小孔,从而将所述上伸缩连杆302首端固定于所述上部连杆固定盘304的第一卡槽中。
55.其中,所述下部连杆固定盘305顶部边缘均匀分布六个第二卡槽,所述下部连杆固定盘305的侧面一周设置有第二凹槽;所述下伸缩连杆303末端通过所述第二卡槽与所述下部连杆固定盘305连接。
56.需要说明的是,所述第二凹槽内部置有第二鱼线,所述第二鱼线穿过所述第二卡槽以及所述下伸缩连杆303末端的小孔,从而将所述下伸缩连杆303末端固定于所述下部连杆固定盘305的第二卡槽中。
57.在具体实施过程中,均匀分布在所述半球壳12上的螺旋叶片11捕捉利用海洋中的自然洋流,带动半球壳12转动,进而实现为发条15蓄力。源源不断的洋流使所述动力机构1运作,保证所述仿生水母机器人在水下永不停歇地运动工作。所述传动机构2中连杆结构实现动力多级传导,巧妙地将圆周运动转化为直线运动,从而实现动力机构1与伸缩机构3的连接,保证所述仿生水母机器人在水中实现上下伸缩的喷进式运动。
58.可见,本实施例提供的基于洋流推力运动的仿生水母机器人的半球壳为亚克力材
质,可以使所述仿生水母机器人在运动的过程中最大程度地减少自身重力,增大其在水中的浮力,从而避免所述仿生水母机器人沉入水底,保证仿生水母机器人可以在水中自如的运动,同时,本实施例提供的仿生水母机器人,能够实现利用自然洋流产生的推力实现在水下不停歇地工作,减少海洋里的污染排放,极具环保作用。
59.本领域普通技术人员可以理解:附图只是一个实施例的示意图,附图中的模块或流程并不一定是实施本实用新型所必须的。
60.本领域普通技术人员可以理解:实施例中的装置中的模块可以按照实施例描述分布于实施例的装置中,也可以进行相应变化位于不同于本实施例的一个或多个装置中。上述实施例的模块可以合并为一个模块,也可以进一步拆分成多个子模块。
61.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1