一种遥控智能救生装置的制作方法
1.本实用新型涉及救生设备技术,尤其涉及一种遥控智能救生装置,属于航海救援技术领域。
背景技术:
2.传统的救生圈无动力装置,如遇人员落水情况,只能由救援人员开船至落水人员周围,再进行救生圈的人工抛洒,落水人员趴伏至救生圈上等待人工拖拽进行回收救援,此过程的时间耗费较多,势必降低救援效率。
3.传统的救生圈抛洒后如果不能准确落在落水人员的周围,救援难度会大大提高。
4.救生艇虽然有足够的动力驱动,但体积庞大,操作复杂,简便性不足。
技术实现要素:
5.本实用新型的目的在于,针对上述传统的救生圈无动力装置,会延误救援时间;救生艇虽然有足够的动力驱动,但体积庞大,操作复杂的问题,通过本实用新型,以实现救援迅速、便于搬运及操纵的效果。
6.为实现上述目的,本实用新型采用的技术方案是:
7.一种遥控智能救生装置,包括:壳体、驱动机构、安全扶手、蓄电池及主控机构;所述壳体为流线型设计的u型结构;两个所述驱动机构分别设置于所述壳体后端的两个端部;所述壳体上设有至少两个所述安全扶手;所述蓄电池和主控机构均设置于所述壳体的上壳面;所述蓄电池为所述主控机构供电;所述主控机构控制所述驱动机构驱动所述壳体在水面上运动及调整方向;所述驱动机构,包括:带有螺旋桨的驱动电机、进水部及出水部;所述主控机构控制所述驱动电机带动螺旋桨运转,螺旋桨转动将来自所述进水部的水通过所述出水部排出。
8.进一步地,所述进水部与所述出水部固定连接;所述进水部上的进水口位于下方,所述出水部周向设有多个出水口,所述驱动电机上的螺旋桨与所述出水部固定连接。
9.进一步地,所述壳体的上壳面还设有用于警示救援的蜂鸣器,所述蜂鸣器与所述主控机构电连接。
10.进一步地,所述壳体的两侧分别设有两个所述安全扶手;所述壳体的上壳面的前部设有一个所述安全扶手。
11.进一步地,所述蓄电池和主控机构外部设有防水盒保护。
12.进一步地,所述防水盒内还设有用于外接电源充电的充电插头。
13.进一步地,所述主控机构设有无线控制接收模块;所述无线控制接收模块接收遥控器发出的无线遥控信号。
14.本实用新型遥控智能救生装置,与现有技术相比较具有以下优点:
15.1)本实用新型设有的动力装置可以使其迅速到达落水人员周围,待落水人员趴伏完成后,可通过遥控装置遥控救生圈迅速驶至安全地点,救援效率大幅度提高。
16.2)本实用新型可以通过遥控装置实现救生装置的自动返航功能,落水人员趴伏完成后,救生装置会按照原路线自动返回。
17.3)本实用新型配备蜂鸣器,在警示救援已开展的同时也使得救生圈及落水人员更容易被识别,更清晰可见。
18.4)本实用新型采用“u”型和线形结构设计,使得水阻得到减小,航行速度大大增加。
附图说明
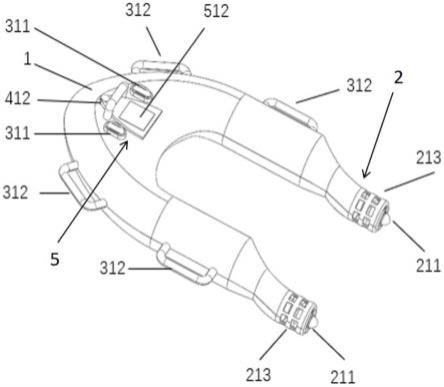
19.图1为本实用新型遥控智能救生装置结构示意图;
20.图2为本实用新型遥控智能救生装置的爆炸结构示意图。
21.上述附图中,1、壳体;2、驱动机构;312、安全扶手;411、蓄电池;5、主控机构;211、驱动电机;212、进水部;213、出水部;311、蜂鸣器;511、防水盒;512、防水盒盖;412、充电插头。
具体实施方式
22.以下结合实施例对本实用新型进一步说明:
23.实施例1
24.如图1所示,本实施例公开了一种遥控智能救生装置,包括:用于容纳承载各种机构的壳体1、用于达到救生装置前进与转向的目的驱动机构2、用于供落水人员抓紧救生装置并趴伏在装置上以取得稳定救援的安全扶手312,以及蓄电池411和主控机构5。壳体1为流线型设计的u型结构,从而使得水阻得到减小,航行速度大大增加。如图2所示,壳体1可以为上下两半式中空结构,以便于拆卸、安装与维护。壳体1的底部可以是水平的,也可以是有弧度的。两个驱动机构2分别设置于壳体1后端的两个端部;壳体1上设有至少两个安全扶手312;蓄电池411和主控机构5均设置于壳体1的上壳面;蓄电池411为主控机构5供电;主控机构5控制驱动机构2驱动壳体1在水面上运动及调整方向;驱动机构2,包括:带有螺旋桨的驱动电机211、进水部212及出水部213;进水部212与出水部213固定连接;进水部212上的进水口位于下方,出水部213周向设有多个出水口,驱动电机211上的螺旋桨与出水部213固定连接。主控机构5控制驱动电机211带动螺旋桨运转,螺旋桨转动将来自进水部212的水通过出水部213排出。
25.实施例2
26.如图1所示,本实施例壳体1的上壳面还设有两个用于警示救援的蜂鸣器311,蜂鸣器311与主控机构5电连接。在救生装置临近落水者时,控制蜂鸣器311开始发出警示信号,以提示落水者救援装置正在赶来,有效提高落水者的生存信心,同时,落水者在意识到警示信号后可能会做出动作,更有助于救援队发现确定落水者位置。在装置救助落水者成功返回后也可以使用蜂鸣器311提示救援返回。蜂鸣器311可以同时具有声音和闪光警示信号,从而提高在较恶劣海况、气象条件下的警示救援作用。
27.实施例3
28.如图2所示,本实施例壳体1的两侧分别设有两个安全扶手312,更便于落水者在任何角度都能抓取,与装置贴近;壳体1的上壳面的前部设有一个安全扶手312,以便于救援装
置救援返回后,落水者抓住上方的安全扶手312,防止因为虚弱无力再次滑落水中。
29.实施例4
30.如图1所示,本实施例蓄电池411和主控机构5外部设有防水盒511保护,防水盒511上设有防水盒盖512,防止海上浪大导致蓄电池411和主控机构5进水后短路损坏。防水盒511内还设有用于外接电源充电的充电插头412,从而可以通过直流和交流两种方式充电。
31.实施例5
32.如图1所示,本实施例主控机构5设有无线控制接收模块;无线控制接收模块接收遥控器发出的无线遥控信号。通过遥控器控制救生装置迅速到达落水者周围,待落水者趴伏完成后,通过遥控器遥控救生装置迅速驶至安全地点,从而使得救援效率大幅度提高。
33.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
技术特征:
1.一种遥控智能救生装置,其特征在于,包括:壳体(1)、驱动机构(2)、安全扶手(312)、蓄电池(411)及主控机构(5);所述壳体(1)为流线型设计的u型结构;两个所述驱动机构(2)分别设置于所述壳体(1)后端的两个端部;所述壳体(1)上设有至少两个所述安全扶手(312);所述蓄电池(411)和主控机构(5)均设置于所述壳体(1)的上壳面;所述蓄电池(411)为所述主控机构(5)供电;所述主控机构(5)控制所述驱动机构(2)驱动所述壳体(1)在水面上运动及调整方向;所述驱动机构(2),包括:带有螺旋桨的驱动电机(211)、进水部(212)及出水部(213);所述主控机构(5)控制所述驱动电机(211)带动螺旋桨运转,螺旋桨转动将来自所述进水部(212)的水通过所述出水部(213)排出。2.如权利要求1所述的遥控智能救生装置,其特征在于,所述进水部(212)与所述出水部(213)固定连接;所述进水部(212)上的进水口位于下方,所述出水部(213)周向设有多个出水口,所述驱动电机(211)上的螺旋桨与所述出水部(213)固定连接。3.如权利要求2所述的遥控智能救生装置,其特征在于,所述壳体(1)的上壳面还设有用于警示救援的蜂鸣器(311),所述蜂鸣器(311)与所述主控机构(5)电连接。4.如权利要求3所述的遥控智能救生装置,其特征在于,所述壳体(1)的两侧分别设有两个所述安全扶手(312);所述壳体(1)的上壳面的前部设有一个所述安全扶手(312)。5.如权利要求3所述的遥控智能救生装置,其特征在于,所述蓄电池(411)和主控机构(5)外部设有防水盒(511)保护。6.如权利要求5所述的遥控智能救生装置,其特征在于,所述防水盒(511)内还设有用于外接电源充电的充电插头(412)。7.如权利要求6所述的遥控智能救生装置,其特征在于,所述主控机构(5)设有无线控制接收模块;所述无线控制接收模块接收遥控器发出的无线遥控信号。
技术总结
本实用新型提供一种遥控智能救生装置。本实用新型包括:壳体、驱动机构、安全扶手、蓄电池及主控机构;壳体为流线型设计的U型结构;两个驱动机构分别设置于壳体后端的两个端部;壳体上设有至少两个安全扶手;蓄电池和主控机构均设置于壳体的上壳面;蓄电池为主控机构供电;主控机构控制驱动机构驱动壳体在水面上运动及调整方向;驱动机构,包括:带有螺旋桨的驱动电机、进水部及出水部;主控机构控制驱动电机带动螺旋桨运转,螺旋桨转动将来自进水部的水通过出水部排出。通过本实用新型以实现救援迅速、便于搬运及操纵的技术效果。便于搬运及操纵的技术效果。便于搬运及操纵的技术效果。
技术研发人员:李博 姚澎 黎书琦 涂晨 方正伟 姜云龙 孙乐
受保护的技术使用者:博海智航(大连)船舶科技有限责任公司
技术研发日:2022.04.20
技术公布日:2022/8/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1