一种水下无人机与小型潜艇混合装置
1.本实用新型涉及水下移动工具改进技术领域,具体涉及一种水下无人机与小型潜艇混合装置。
背景技术:
2.潜艇的种类繁多,形制各异,小到全自动或一两人操作、作业时间数小时的小型民用潜水探测器,大至可装载数百人、连续潜航3-6个月的台风级核潜艇。按体积可分为大型(主要为军用)、中型或小型(袖珍潜艇、潜水器)和水下自动机械装置等。针对现有技术存在以下问题:
3.1、现有技术小型潜艇动力采用的大多是单层桨,速度提升的时间较长,加速度较小,另一方面,单层桨的损坏后,将会失去动力源,导致小型潜艇在水中滞留;
4.2、现有技术小型潜艇在水中的灵活性有待提高,特别是在垂直方向上的移动,绝大部分采用的是排水来改变自身浮力的方式,以此来实现上下移动,较弱于水下无人机内置方向驱动的机动性。
技术实现要素:
5.本实用新型提供一种水下无人机与小型潜艇混合装置,其中一种目的是为了具备自由调节移动方向和角度的功能,解决水下无人机与小型潜艇混合装置在水中机动性不强的问题;其中另一种目的是为了解决加速度较小和动力安全性不足的问题,以达到提高加速度并增加安全保障的效果。
6.为解决上述技术问题,本实用新型所采用的技术方案是:
7.一种水下无人机与小型潜艇混合装置,包括小型潜水艇本体,所述小型潜水艇本体的侧面固定连接有水下机翼,所述水下机翼的内部转动连接有方向驱动机构,所述方向驱动机构包括方向扇机构,所述方向扇机构包括叶轮。
8.所述叶轮的中部固定连接有球形连接轴套,所述小型潜水艇本体的左端转动连接有动力桨机构。
9.所述动力桨机构包括正向旋转桨,所述正向旋转桨的一侧固定连接有连接轴套二,所述连接轴套二的中部固定安装有中心旋转轴。
10.本实用新型技术方案的进一步改进在于:所述正向旋转桨的右方活动连接有反向旋转桨,所述反向旋转桨的一侧固定连接有连接轴套一,所述连接轴套一的右侧固定连接有连接轴筒,所述连接轴筒的右侧固定连接有从动斜齿轮二,所述从动斜齿轮二的左侧搭接有固定轴套一。
11.本实用新型技术方案的进一步改进在于:所述固定轴套一的中部转动连接有连接轴筒,所述固定轴套一的外表面上侧固定连接有u型连接杆,所述u型连接杆的中部固定连接有固定轴套二,所述固定轴套二的上方转动连接有步进电机。
12.本实用新型技术方案的进一步改进在于:所述固定轴套二的下侧搭接有主动斜齿
轮,所述主动斜齿轮的中部与步进电机的下端固定安装,所述主动斜齿轮的右下侧活动连接有从动斜齿轮一,所述主动斜齿轮的左下侧活动连接有从动斜齿轮二。
13.本实用新型技术方案的进一步改进在于:所述从动斜齿轮一的右侧与u型连接杆的内壁右侧搭接,所述u型连接杆的中部转动连接有中心旋转轴,所述中心旋转轴的外表面与从动斜齿轮一的轴心中部和从动斜齿轮二的轴心中部转动连接,所述中心旋转轴的外表面与连接轴套一的轴心中部和连接轴筒的内壁转动连接,所述中心旋转轴的外表面与连接轴套二的内壁固定安装。
14.本实用新型技术方案的进一步改进在于:所述球形连接轴套的上方固定安装有伺服电机,所述伺服电机的上侧固定连接有定位柱,所述伺服电机的外表面固定安装有防水密封壳,所述防水密封壳的外表面固定连接有固定杆,所述固定杆的外侧固定连接有弧形外壳,所述弧形外壳的外表面固定连接有连接杆。
15.本实用新型技术方案的进一步改进在于:所述连接杆的外表面与水下机翼的内部转动连接,所述连接杆的外表面固定安装有从动齿轮,所述从动齿轮的下侧活动连接有蜗杆,所述蜗杆的左侧固定安装有电机,所述电机的外表面与水下机翼的内部固定连接。
16.由于采用了上述技术方案,本实用新型相对现有技术来说,取得的技术进步是:
17.1、本实用新型提供一种水下无人机与小型潜艇混合装置,采用正向旋转桨、反向旋转桨、连接轴筒、固定轴套一、u型连接杆、步进电机、固定轴套二、主动斜齿轮、从动斜齿轮一、从动斜齿轮二、连接轴套一、连接轴套二和中心旋转轴的配合,通过启动步进电机工作,带动主动斜齿轮转动,啮合的从动斜齿轮一顺时针转动,带动中心旋转轴和连接轴套二顺时针转动,进而使正向旋转桨顺时针转动,与主动斜齿轮啮合的从动斜齿轮二逆时针转动,使连接轴筒和连接轴套一逆时针转动,使得反向旋转桨逆时针转动,正向旋转桨提供主动力,反向旋转桨克服反扭矩力并使水流加速穿过正向旋转桨,辅助推动正向旋转桨,解决加速度较小和动力安全性不足的问题,达到提高加速度并增加安全保障的效果。
18.2、本实用新型提供一种水下无人机与小型潜艇混合装置,采用方向扇机构、从动齿轮、连接杆、蜗杆、电机、弧形外壳、防水密封壳、叶轮、伺服电机和球形连接轴套的配合,通过启动伺服电机工作,带动球形连接轴套和叶轮转动,推动叶轮上方的水穿过弧形外壳往下,同时水的反作用力将推动球形连接轴套和叶轮往上,使得整体获得向上的力,启动电机工作,带动蜗杆转动,啮合的从动齿轮转动一定角度,使得连接杆和弧形外壳转动一定角度,由此控制叶轮的推动力方向,进而控制整体移动的方向和角度,解决水下无人机与小型潜艇混合装置在水中机动性不强的问题,达到自由调节移动方向和角度的效果。
附图说明
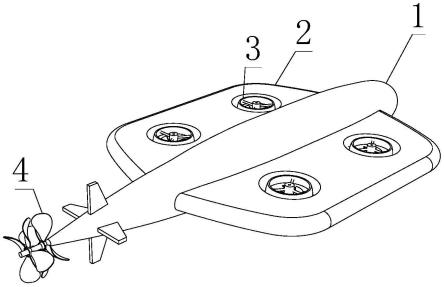
19.图1为本实用新型的结构示意图;
20.图2为本实用新型方向驱动机构的结构示意图;
21.图3为本实用新型方向扇机构剖面的结构示意图;
22.图4为本实用新型动力桨机构的结构示意图。
23.图中:1、小型潜水艇本体;
24.2、水下机翼;
25.3、方向驱动机构;31、方向扇机构;311、弧形外壳;312、定位柱;313、防水密封壳;
314、固定杆;315、叶轮;316、球形连接轴套;317、伺服电机;32、从动齿轮;33、连接杆;34、蜗杆;35、电机;
26.4、动力桨机构;41、正向旋转桨;42、反向旋转桨;43、连接轴筒;44、固定轴套一;45、u型连接杆;46、步进电机;47、固定轴套二;48、主动斜齿轮;49、从动斜齿轮一;410、从动斜齿轮二;411、连接轴套一;412、连接轴套二;413、中心旋转轴。
具体实施方式
27.下面结合实施例对本实用新型做进一步详细说明:
28.实施例1
29.如图1-4所示,本实用新型提供了一种水下无人机与小型潜艇混合装置,包括小型潜水艇本体1,小型潜水艇本体1的侧面固定连接有水下机翼2,水下机翼2的内部转动连接有方向驱动机构3,方向驱动机构3包括方向扇机构31,方向扇机构31包括叶轮315,叶轮315的中部固定连接有球形连接轴套316,小型潜水艇本体1的左端转动连接有动力桨机构4,动力桨机构4包括正向旋转桨41,正向旋转桨41的一侧固定连接有连接轴套二412,连接轴套二412的中部固定安装有中心旋转轴413。
30.在本实施例中,通过设置水下机翼2,将小型潜水艇本体1和水下机翼2结合,在小型潜水艇的两侧增加水下机翼,在水中移动时更加平稳,设置方向驱动机构3,四个均匀分布在装置的两侧,各自独立调节,使得移动的角度和方向能更加的多变,提高装置的机动灵活性,设置动力桨机构4,同轴正反双桨提供动力,提高加速度,增加平稳性。
31.实施例2
32.如图1-4所示,在实施例1的基础上,本实用新型提供一种技术方案:优选的,正向旋转桨41的右方活动连接有反向旋转桨42,反向旋转桨42的一侧固定连接有连接轴套一411,连接轴套一411的右侧固定连接有连接轴筒43,连接轴筒43的右侧固定连接有从动斜齿轮二410,从动斜齿轮二410的左侧搭接有固定轴套一44,固定轴套一44的中部转动连接有连接轴筒43,固定轴套一44的外表面上侧固定连接有u型连接杆45,u型连接杆45的中部固定连接有固定轴套二47,固定轴套二47的上方转动连接有步进电机46,固定轴套二47的下侧搭接有主动斜齿轮48,主动斜齿轮48的中部与步进电机46的下端固定安装,主动斜齿轮48的右下侧活动连接有从动斜齿轮一49,主动斜齿轮48的左下侧活动连接有从动斜齿轮二410,从动斜齿轮一49的右侧与u型连接杆45的内壁右侧搭接,u型连接杆45的中部转动连接有中心旋转轴413,中心旋转轴413的外表面与从动斜齿轮一49的轴心中部和从动斜齿轮二410的轴心中部转动连接,中心旋转轴413的外表面与连接轴套一411的轴心中部和连接轴筒43的内壁转动连接,中心旋转轴413的外表面与连接轴套二412的内壁固定安装。
33.在本实施例中,通过启动步进电机46工作,带动主动斜齿轮48转动,啮合的从动斜齿轮一49顺时针转动,带动中心旋转轴413和连接轴套二412顺时针转动,进而使正向旋转桨41顺时针转动,与主动斜齿轮48啮合的从动斜齿轮二410逆时针转动,使连接轴筒43和连接轴套一411逆时针转动,使得反向旋转桨42逆时针转动,正向旋转桨41提供主动力,反向旋转桨42克服反扭矩力并使水流加速穿过正向旋转桨41,辅助推动正向旋转桨41,解决加速度较小和动力安全性不足的问题,达到提高加速度并增加安全保障的效果。
34.实施例3
35.如图1-4所示,在实施例1的基础上,本实用新型提供一种技术方案:优选的,球形连接轴套316的上方固定安装有伺服电机317,伺服电机317的上侧固定连接有定位柱312,伺服电机317的外表面固定安装有防水密封壳313,防水密封壳313的外表面固定连接有固定杆314,固定杆314的外侧固定连接有弧形外壳311,弧形外壳311的外表面固定连接有连接杆33,连接杆33的外表面与水下机翼2的内部转动连接,连接杆33的外表面固定安装有从动齿轮32,从动齿轮32的下侧活动连接有蜗杆34,蜗杆34的左侧固定安装有电机35,电机35的外表面与水下机翼2的内部固定连接。
36.在本实施例中,通过启动伺服电机317工作,带动球形连接轴套316和叶轮315转动,推动叶轮315上方的水穿过弧形外壳311往下,同时水的反作用力将推动球形连接轴套316和叶轮315往上,使得整体获得向上的力,启动电机35工作,带动蜗杆34转动,啮合的从动齿轮32转动一定角度,使得连接杆33和弧形外壳311转动一定角度,由此控制叶轮315的推动力方向,进而控制整体移动的方向和角度,解决水下无人机与小型潜艇混合装置在水中机动性不强的问题,达到自由调节移动方向和角度的效果。
37.下面具体说一下该水下无人机与小型潜艇混合装置的工作原理。
38.如图1-4所示,在使用该水下无人机与小型潜艇混合装置时,将装置放置在水中,启动步进电机46工作,带动主动斜齿轮48转动,啮合的从动斜齿轮一49顺时针转动,带动中心旋转轴413和连接轴套二412顺时针转动,进而使正向旋转桨41顺时针转动,与主动斜齿轮48啮合的从动斜齿轮二410逆时针转动,使连接轴筒43和连接轴套一411逆时针转动,使得反向旋转桨42逆时针转动,正向旋转桨41提供主动力,反向旋转桨42克服反扭矩力并使水流加速穿过正向旋转桨41,辅助推动正向旋转桨41,启动伺服电机317工作,带动球形连接轴套316和叶轮315转动,推动叶轮315上方的水穿过弧形外壳311往下,同时水的反作用力将推动球形连接轴套316和叶轮315往上,使得整体获得向上的力,启动电机35工作,带动蜗杆34转动,啮合的从动齿轮32转动一定角度,使得连接杆33和弧形外壳311转动一定角度,由此控制叶轮315的推动力方向,进而控制整体移动的方向和角度。
39.上文一般性的对本实用新型做了详尽的描述,但在本实用新型基础上,可以对之做一些修改或改进,这对于技术领域的一般技术人员是显而易见的。因此,在不脱离本实用新型思想精神的修改或改进,均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1