一种水下机器人
1.本实用新型涉及水下机器人的技术领域,尤其涉及一种水下机器人。
背景技术:
2.水下机器人是一种在环境监测和救援中经常需要使用到的设备,通过水下机器人潜入到水中,能够对水下的环境进行监控,方便工作人员对水下污垢等进行清理,或者通过对水下环境的监控,方便定位到落水人员,对落水的人实施救援,非常方便,但是水下机器人进入到水中需要使用到钩锁对其进行捆绑,通过放绳的方式进行使用,以防止其丢失,但是一旦因为一些意外被水中的物体磕碰导致脱钩等时,则容易失去对水下机器人的定位,从而导致不清楚其方位,无法自动浮起不方便寻找,造成损失,而通过直接在勾上捆绑大的浮圈也会造成机器人在行动时的不便。
技术实现要素:
3.本部分的目的在于概述本实用新型的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和实用新型名称中可能会做些简化或省略以避免使本部分、说明书摘要和实用新型名称的目的模糊,而这种简化或省略不能用于限制本实用新型的范围。
4.鉴于上述现有水下机器人存在的问题,提出了本实用新型。
5.因此,本实用新型目的是提供一种水下机器人,其目的在于:一旦产生脱钩现象时,则会自动进行救援为存气件充气,通过浮力自动浮起。
6.为解决上述技术问题,本实用新型提供如下技术方案:一种水下机器人,包括机器人机构、脱钩机构和自救结构,其中机器人机构,其包括机器人本体、设置于所述机器人本体外表面的平衡导流件以及固定于所述机器人本体侧壁的驱动装置;自救机构,包括安装于所述机器人本体上的储气件、开设于所述机器人本体中的出气腔和固定连接在出气腔出气口处的存气件。
7.作为本实用新型所述水下机器人的一种优选方案,其中:还包括脱钩机构,其包括设置于所述机器人本体外侧的限位环、以及穿过所述限位环与其相配合的吊钩。
8.作为本实用新型所述水下机器人的一种优选方案,其中:所述脱钩机构还包括漂浮组件和穿刺组件;所述漂浮组件包括设置于被所述吊钩配合限制移动的浮力圈、固定于所述浮力圈一侧的第一磁力块和与所述第一磁力块相配合并固定设置在所述机器人本体外侧的第二磁力块。
9.作为本实用新型所述水下机器人的一种优选方案,其中:所述穿刺组件包括固定于所述浮力圈一端并延伸至所述机器人本体内部的连接链和设置于所述连接链另一端的滑块。
10.作为本实用新型所述水下机器人的一种优选方案,其中:所述穿刺组件还包括支撑板、弹性件和穿刺件;所述支撑板设置于所述滑块外侧壁并固定所述弹性件的一端,且所
述弹性件的另一端设置于所述机器人本体的内部,所述支撑板的板面上设置的所述穿刺件靠近所述存气件。
11.作为本实用新型所述水下机器人的一种优选方案,其中:所述第一磁力块与所述第二磁力块为异极相吸。
12.作为本实用新型所述水下机器人的一种优选方案,其中:所述滑块能够被所述浮力圈通过所述连接链拉扯在机器人本体中滑动。
13.作为本实用新型所述水下机器人的一种优选方案,其中:所述机器人本体中的所述支撑板能够通过所述弹性件往复滑动。
14.作为本实用新型所述水下机器人的一种优选方案,其中:所述储气件能够与所述机器人本体拆装配合,且其内部填充高压co2。
15.作为本实用新型所述水下机器人的一种优选方案,其中:所述存气件装在所述机器人本体设有的腔室内,且其一端延伸至所述机器人本体的外侧。
16.本实用新型的有益效果:一旦脱钩时,浮力圈则不再被限位,其通过自身浮力会通过连接链拉扯穿刺组件,从而使得穿刺件刺入到储气件中,使得储气件内部的气体高压喷出充满存气件,使得存气件的浮力猛然增大带动整体直接浮起,达到自救援,方便工作人员找寻。
附图说明
17.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
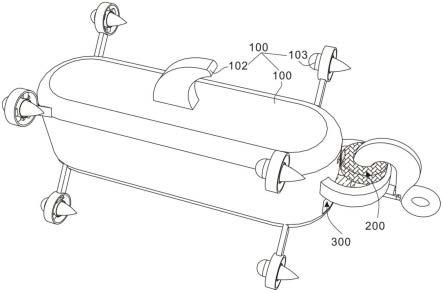
18.图1为本实用新型水下机器人的整体结构示意图。
19.图2为本实用新型水下机器人的漂浮组件与穿刺组件连接剖视结构示意图。
20.图3为本实用新型水下机器人的存气件工作剖视结构示意图。
具体实施方式
21.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合说明书附图对本实用新型的具体实施方式做详细的说明。
22.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是本实用新型还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似推广,因此本实用新型不受下面公开的具体实施例的限制。
23.其次,此处所称的“一个实施例”或“实施例”是指可包含于本实用新型至少一个实现方式中的特定特征、结构或特性。在本说明书中不同地方出现的“在一个实施例中”并非均指同一个实施例,也不是单独的或选择性的与其他实施例互相排斥的实施例。
24.再其次,本实用新型结合示意图进行详细描述,在详述本实用新型实施例时,为便于说明,表示器件结构的剖面图会不依一般比例作局部放大,而且所述示意图只是示例,其在此不应限制本实用新型保护的范围。此外,在实际制作中应包含长度、宽度及深度的三维空间尺寸。
25.实施例1
26.参照图1,为本实用新型第一个实施例,提供了一种水下机器人,此装置包括机器人机构100、脱钩机构200和自救结构300。
27.其中,机器人机构100,其包括机器人本体101、设置于机器人本体101外表面的平衡导流件102以及固定于机器人本体101侧壁的驱动装置103;自救机构300,包括安装于机器人本体101上的储气件301、开设于机器人本体101中的出气腔302和固定连接在出气腔301出气口处的存气件303。
28.使用过程中,当机器人本体101通过平衡导流件102和驱动装置103在水中进行行驶时脱钩时,储气件301会快速通过出气腔302为存气件303充气,使得存气件303充气让整体能够通过浮力浮起,方便自行救援。
29.进一步的,驱动装置103可采用td1.2rov型号的水下推进器,也可以采用其余能够用于水中驱动的设备。
30.实施例2
31.参照图1~2,为本实用新型的第二个实施例,该实施例不同于第一个实施例的是:还包括脱钩机构200,其包括设置于机器人本体101外侧的限位环201、以及穿过限位环201与其相配合的吊钩202,脱钩机构200还包括漂浮组件203和穿刺组件204;漂浮组件203包括设置于被吊钩202配合限制移动的浮力圈203a、固定于浮力圈203a一侧的第一磁力块203b和与第一磁力块203b相配合并固定设置在机器人本体101外侧的第二磁力块203c。
32.相较于实施例1,进一步的,第二磁力块203c和第一磁力块203b是异极相吸状态,而浮力圈203a在水中的浮力大于第二磁力块203c和第一磁力块203b的相吸力。
33.更进一步的,脱钩机构200中的吊钩202一旦脱离限位环201,浮力圈203a也随之被松开,导致浮力圈203a有浮力浮起,但是整体的重量较重,两者产生对抗力,从而浮力圈203a则上的第一磁力块203b与第二磁力块203c脱离不再相吸,让浮力圈203a则会拉动连接链204a。
34.其余结构与实施例1的结构相同。
35.实施例3
36.参照图1~3,为本实用新型的第三个实施例,该实施例不同于第二个实施例的是:穿刺组件204包括固定于浮力圈203a一端并延伸至机器人本体101内部的连接链204a和设置于连接链204a另一端的滑块204b,穿刺组件204还包括支撑板204c、弹性件204d和穿刺件204f;支撑板204c设置于滑块204b外侧壁并固定弹性件204d的一端,且弹性件204d的另一端设置于机器人本体101的内部,支撑板204c的板面上设置的穿刺件204f靠近存气件303,第一磁力块203b与第二磁力块203c为异极相吸,滑块204b能够被浮力圈203a通过连接链204a拉扯在机器人本体101中滑动,机器人本体101中的支撑板204c能够通过弹性件204d往复滑动,储气件301能够与机器人本体101拆装配合,且其内部填充高压co2,存气件303装在机器人本体101设有的腔室内,且其一端延伸至机器人本体101的外侧。
37.相较于实施例2,进一步的,连接链204a被拉扯时,连接链204a则会对滑块204b进行拉伸,从而滑块204b上的支撑板204c推动穿刺件204f并压缩弹性件204d充能。
38.更进一步的,穿刺件204f一旦被推动,则会穿刺储气件301,而储气件301能够采用为填有高压co2的气瓶,其一旦被刺穿内部的高压气体则冲入存气件303,存气件可采用尼
龙织物制作而成,密封防水且一旦充气其浮力较大则可以带动整体浮起。
39.其余结构与实施例2的结构相同。
40.实施例4
41.本实用新型的第四个实施例,该实施例不同于第三个实施例的是:该水下机器人控制系统基于stc15w单片机,搭载了摄像头模块、无线通信模块、陀螺仪模块等,遥控器上的单片机通过a/d模数转换读取摇杆上的角度信号,经过一系列分析转换后,把角度信号和其他的附加指令打包成一长串数据,通过spi协议写入无线模块中。
42.进一步的,遥控器的无线模块通过一系列指令进行模块间的通信,将数据发送给水下机器人的无线模块,接着,水下机器人在接收到数据后,一方面会对发送模块产生应答,另一方面发送命令到水下机器人的中央处理器。
43.更进一步的,中央处理器收到指令后,通过spi协议读出该无线模块所传输的数据,根据预先设定的程序进行运算;最后,中央处理器把陀螺仪模块上读取的实时姿态信号转换成电信号,以脉冲宽度调制方式发送给电调和舵机,从而实现水下机器人的智能控制,实现了水下环境的实时监控,解决了水下探测、水下救援的困难。
44.其余结构与实施例3的结构相同。
45.结合附图1~3所示,穿刺件204f及支撑板204c因为受到弹性件204d的作用不会碰到储气件301,当机器人本体101使用驱动装置103驱动在水里通过平衡导流件102平衡游动时,吊钩202的从限位环201中脱钩则使得浮力圈203a不再被其限制,其自身浮力则会与整体的下沉力对抗,从而浮力圈203a则在此作用下让第一磁力块203b与第二磁力块203c分离,而浮力圈203a也会通过连接链204a拉动滑块204b,并通过滑块204b拉扯支撑板204c推动穿刺件204f刺向储气件301,使得储气件301破碎,内部的高压co2则通过出气腔302排出,进入到存气件303中,存气件303进入气体被撑开,从而内部具有浮力,则会通过该浮力带动整体浮出水面,达到自救援效果。
46.应说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围,其均应涵盖在本实用新型的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1