一种水下机器人用脱钩器的制作方法
1.本技术涉及水下机器人技术领域,具体公开了一种水下机器人用脱钩器。
背景技术:
2.水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。无人遥控潜水器主要有:有缆遥控潜水器和无缆遥控潜水器两种,其中有缆遥控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种。潜水器的水下运动和作业,是由操作员在水面母舰上控制和监视。靠电缆向本体提供动力和交换信息。新型潜水器从简单的遥控式向监控式发展,即由母舰计算机和潜水器本体计算机实行递阶控制,它能对观测信息进行加工,建立环境和内部状态模型。
3.现有的脱钩器大都需要操作人员手动进行操作,需要配合潜水员在水下人力取钩才能使水下机器人和吊装装置之间脱钩,而潜水员取钩的过程增加了潜水员自身的安全系数,存在意外潜水员伤害隐患。因此,发明人有鉴于此,提供了一种水下机器人用脱钩器,以便解决上述问题。
技术实现要素:
4.本实用新型的目的在于解决传统的脱钩装置需要潜水员潜入水下取钩,脱钩器不容易脱钩问题。
5.为了达到上述目的,本实用新型的基础方案提供一种水下机器人用脱钩器,包括连接架和设于连接架下方与连接架相互平行的连接板,所述连接板与连接架之间设有若干连接柱,所述连接板的下方对称设有若干可对水下机器人进行夹取的勾爪;
6.所述勾爪包括可拆卸连接在连接板下表面的连接头和对称铰接在连接头上的连接杆,连接杆之间铰接有弹簧杆,连接杆的自由端还均铰接有相互交叉设置的抱杆,抱杆的自由端均固接有可对水下机器人进行起吊的夹头。
7.本基础方案的原理及效果在于:
8.1、与现有技术相比,本实用新型设有连接杆、弹簧杆、连接头、抱杆和夹头等,连接杆和抱杆共同构成四连杆结构,通过将水下机器人上的绳缆放置在夹头内,通过将连接头向上拉动,四连杆角度发生变化,下方的夹头相互靠近了对水下机器人进行起吊,当水下机器人放置在水底,对勾爪不再有拉力时,四杆机构下的夹头在弹簧杆的作用下逐渐向两端扩张,夹头松开,即松开了对水下机器人上的绳缆吊,降低了工作人员缠绕绳结的麻烦,避免了潜水员潜入水下取钩,方便脱钩器脱钩。
9.2、与现有技术相比,本实用新型设有连接架、连接板,连接板的设置便于分布设置多个勾爪,设置多个勾爪方便平稳地对水下机器人的连接,连接架便于与起吊机进行连接。
10.进一步,所述连接头包括连接框和固接在连接框顶部的凸板,所述连接框内设有用于安装连接杆的销柱。连接杆用于安装在连接框内通过销柱进行连接,连接杆铰接在连
接框内。
11.进一步,所述凸板的顶部设有若干用于将凸板进行固定的安装孔。通过开设安装孔便于凸板安装在连接板上。
12.进一步,所述连接架与连接板之间固接有加强柱。加强柱起到拼接连接架和连接板的作用。
13.进一步,所述连接板呈矩形结构。
14.进一步,所述连接架呈“米”字型结构。连接架呈“米”字型结构能够减轻结构的重量,便于水下机器人的挂钩,同时也提高了连接架的结构强度。
15.进一步,所述连接架的上方设有若干吊环。通过设置吊环便于脱钩器的连接。
16.进一步,所述吊环包括可拆卸连接在连接架四周的主吊环和滑动连接在连接架上的副吊环。主吊环和副吊环的配合连接方便与起吊机的连接。
17.进一步,所述弹簧杆包括长度可进行改变的伸缩杆和套设在伸缩杆上的弹簧。弹簧杆能够进行伸长和缩短,始终具备向外延伸的趋势。
18.进一步,所述连接架与连接板之间设有固接在连接板上的加强栏。
附图说明
19.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
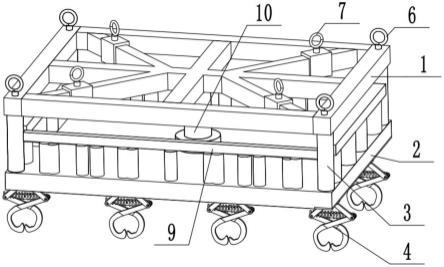
20.图1示出了本技术实施例提出的一种水下机器人用脱钩器的结构示意图;
21.图2示出了本技术实施例提出的一种水下机器人用脱钩器的勾爪结构示意图;
22.图3示出了本技术实施例提出的一种水下机器人用脱钩器的局部示意图。
具体实施方式
23.为更进一步阐述本实用新型为实现预定实用新型目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本实用新型的具体实施方式、结构、特征及其功效,详细说明如后。
24.说明书附图中的附图标记包括:连接架1、连接板2、连接柱3、勾爪4、夹头401、连接杆402、抱杆403、连接头5、连接框501、凸板502、安装孔503、主吊环6、辅吊环7、弹簧杆8、伸缩杆801、弹簧802、加强栏9、加强柱10。
25.一种水下机器人用脱钩器,实施例如图1、图2和图3所示:包括连接架1和设于连接架1下方与连接架1相互平行的连接板2,连接板2呈矩形结构,连接架1呈“米”字型结构,“米”字型结构能够减轻结构的用料重量,同时也能够保证连接架1的结构强度,连接板2与连接架1的四周设有固定安装在连接板2上的连接柱3,连接柱3的数量为四个,连接架1与连接板2之间还设有固定连接在连接板2中心位置的加强柱10,连接板2上还设有固定连接在连接板2上的加强栏9。连接架1的上方设有若干吊环,吊环包括通过螺栓连接的形式可拆卸连接在连接架1四周的主吊环6和滑动连接在连接架1上的副吊环。主吊环6和副吊环的配合连接方便与起吊机的连接。主吊环6和辅吊环7能够在吊运水下机器人重心有偏差时可以局
部调换吊点,以适应水下机器人不同尺寸的吊装,扩充脱钩装置的实用性。
26.连接板2的下方对称设有八个可对水下机器人进行夹取的勾爪4,勾爪4包括通过螺栓连接的形式安装在连接板2下表面的连接头5和对称铰接在连接头5上的连接杆402,连接头5包括连接框501和固定连接在连接框501顶部的凸板502,凸板502的顶部对称设有用于将凸板502进行固定的安装孔503,安装孔503为螺纹孔,连接框501内还设有用于安装连接杆402的销柱;连接杆402之间铰接有弹簧杆8,弹簧杆8包括长度可进行改变的伸缩杆801和套设在伸缩杆801上的弹簧802,弹簧杆8能够伸长和缩短,连接杆402还均铰接有相互交叉设置的抱杆403,抱杆403的底端均固定连接有可对水下机器人进行起吊的夹头401。
27.本实用新型实施过程中,通过将起吊机的钢绳与主吊环6和辅吊环7相连,辅吊环7可以在连接架1上滑动调节,起吊水下机器人时可以更换不同的吊点,增强对水下机器人起吊的稳定性,工作人员通过将水下机器人上的绳缆吊放置在夹头401内,水下机器人具备一定的重量,对水下机器人进行起吊时,连接杆402和抱杆403围成的四连杆角度发生变化,下方的夹头401相互靠近了对水下机器人进行起吊,当水下机器人放置在水底后,对勾爪4不再有拉力时,四杆机构下的夹头401在弹簧杆8的作用下逐渐向两端逐渐扩张,夹头401松开,夹头401松开后,通过拉动钢绳晃动连接架1和连接板2使水下机器人上的绳缆脱离夹头401,脱钩容易,避免了潜水员潜入水下取钩,方便脱钩器脱钩。
28.与现有技术相比,本实用新型设有连接杆402、弹簧杆8、连接头5、抱杆403和夹头401等,连接杆402和抱杆403共同构成四连杆结构,通过将水下机器人上的绳缆放置在夹头401内,通过将连接头5向上拉动,四连杆角度发生变化,下方的夹头401相互靠近了对水下机器人进行起吊,当水下机器人放置在水底,对勾爪4不再有拉力时,四杆机构下的夹头401在弹簧杆8的作用下逐渐向两端扩张,夹头401松开,即松开了对水下机器人上的绳缆吊,降低了工作人员缠绕绳结的麻烦,避免了潜水员潜入水下取钩,方便脱钩器脱钩。
29.以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制,虽然本实用新型已以较佳实施例揭示如上,然而并非用以限定本实用新型,任何本领域技术人员,在不脱离本实用新型技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简介修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1