一种水下机器人防撞机构的制作方法
1.本实用新型属于水下机器人技术领域,具体涉及一种水下机器人防撞机构。
背景技术:
2.随着科学技术的发展及社会时代的进步,水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人,水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具,而水下机器人在水下作业时,容易出现碰撞现象,导致水下机器人损坏,因此通过会在水下机器人的外侧加装防撞机构,以保证水下机器人的安全。
3.现有的水下机器人增加防撞结构,虽然能起到防撞效果,但是增加了水下机器人的负担,不利于机器人移动,而且添加的防撞结构不具有可调功能,当出现机器人不平衡的情况,影响机器人移动。
技术实现要素:
4.本实用新型的目的在于提供一种水下机器人防撞机构,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种水下机器人防撞机构,包括舱体和支架,所述舱体安装在支架的中间,所述支架的底部两侧均设置下防撞气囊,所述支架的顶部两侧均设置上防撞气囊;
6.所述支架的底部两侧均开设底部滑槽,所述底部滑槽内穿过螺杆,所述螺杆的一端固定连接气囊套,所述螺杆的另一端穿过底部滑槽并螺接锁紧螺母,所述下防撞气囊穿过并固定连接气囊套;
7.所述支架顶部设置固定横梁和活动横梁,所述固定横梁固定设置在支架顶部,所述支架顶部一侧设置顶部滑槽,所述活动横梁的两端向下弯折并固定连接n型架,所述n型架滑动跨设在支架的边缘上,所述n型架的一边设置为弹性板,所述n型架上横向穿过螺栓副,所述活动横梁和固定横梁上均安装有气囊套,所述上防撞气囊穿过并固定连接活动横梁上的气囊套,所述上防撞气囊穿过并活动连接固定横梁上的气囊套。
8.优选的,每个下防撞气囊通过两个气囊套固定。
9.优选的,所述固定横梁的中间安装防水电机,所述防水电机的输出端穿过固定横梁并固定连接活动相机。
10.优选的,所述支架上且位于舱体下侧设置相机防撞架,所述相机防撞架内侧设置固定位相机,所述固定位相机下方两侧设置探照灯。
11.优选的,所述相机防撞架侧壁上部设置探照大灯。
12.优选的,所述相机防撞架的形状为倒“几”字型,所述相机防撞架侧壁上部的内侧设置灯安装板,所述探照大灯安装在灯安装板上,所述固定位相机安装在相机防撞架的下部横梁上,所述相机防撞架的上端向外凸起部通过螺丝连接支架。
13.优选的,所述下防撞气囊与上防撞气囊结构相同,所述下防撞气囊与的两端均设
置为球形,且下防撞气囊包括外胆、内胆和连接片,所述内胆设置在外胆内部,所述连接片连接外胆和内胆。
14.本实用新型的技术效果和优点:该水下机器人防撞机构,设置下防撞气囊与上防撞气囊且位置可调,使该水下机器人在水中处于平衡状态可调,调节后,不会出现前后倾斜的问题,非常实用且调节方便,且可提供浮力,减少重力机器人移动的影响;采用气囊防撞,防撞效果好,下防撞气囊与上防撞气囊设置两层结构,在外侧意外破漏,内层依然可以起到防护作用。
附图说明
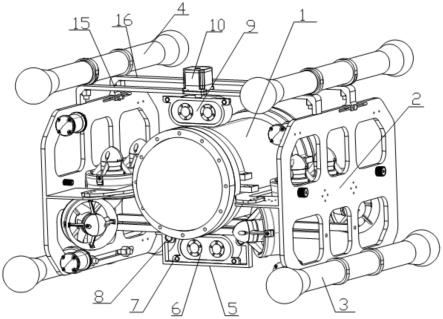
15.图1为本实用新型的结构示意图;
16.图2为本实用新型的支架结构示意图;
17.图3为本实用新型的气囊套与下防撞气囊连接结构示意图;
18.图4为本实用新型的下防撞气囊剖视结构示意图;
19.图5为本实用新型的活动横梁局部结构示意图。
20.图中:1、舱体;2、支架;3、下防撞气囊;31、外胆;32、内胆;33、连接片;4、上防撞气囊;5、相机防撞架;6、固定位相机;7、探照灯;8、探照大灯;9、活动相机;10、防水电机;11、底部滑槽;12、气囊套;13、螺杆;14、锁紧螺母;15、固定横梁;16、活动横梁;17、顶部滑槽;18、n型架;19、螺栓副。
具体实施方式
21.下面结合附图对本实用新型的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本实用新型,但并不构成对本实用新型的限定。此外,下面所描述的本实用新型各个实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互组合。
22.本实用新型提供了如图1-5所示的一种水下机器人防撞机构,包括舱体1和支架2,舱体1安装在支架2的中间,支架2的底部两侧均设置下防撞气囊3,支架2的顶部两侧均设置上防撞气囊4;下防撞气囊3与上防撞气囊4结构相同,下防撞气囊3与的两端均设置为球形,且下防撞气囊3包括外胆31、内胆32和连接片33,内胆32设置在外胆31内部,连接片33连接外胆31和内胆32,下防撞气囊3与上防撞气囊4设置两层结构,在外侧意外破漏,内层依然可以起到防护作用,防护效果好,而且使用气囊进行防护,内部充满气体放入水中时,可以提供浮力,抵消水下机器人部分重力,更利于水下机器人在水下移动。
23.支架2的底部两侧均开设底部滑槽11,底部滑槽11内穿过螺杆13,螺杆13的一端固定连接气囊套12,螺杆13的另一端穿过底部滑槽11并螺接锁紧螺母14,下防撞气囊3穿过并固定连接气囊套12;每个下防撞气囊3通过两个气囊套12固定,使固定更加牢固,拧松锁紧螺母14移动下侧的气囊套12,带动下防撞气囊3移动,从而调节下防撞气囊3的位置,进行前后侧的平衡调节。
24.支架2顶部设置固定横梁15和活动横梁16,固定横梁15固定设置在支架2顶部,支架2顶部一侧设置顶部滑槽17,活动横梁16的两端向下弯折并固定连接n型架18,n型架18滑动跨设在支架2的边缘上,n型架18的一边设置为弹性板,n型架18上横向穿过螺栓副19,螺
栓副19由一个安装螺栓和安装螺母组成,安装螺栓穿过n型架18和顶部滑槽17,安装螺母螺接在安装螺栓的端头,拧紧安装螺母,安装螺母可形变的弹性板,从而使n型架18与支架2挤压,从而将支架2的位置固定,活动横梁16和固定横梁15上均安装有气囊套12,上防撞气囊4穿过并固定连接活动横梁16上的气囊套12,上防撞气囊4穿过并活动连接固定横梁15上的气囊套12,通过移动活动横梁16,上防撞气囊4跟随移动,从而调节上防撞气囊4的位置,进行前后侧的平衡调节。
25.固定横梁15的中间安装防水电机10,防水电机10的输出端穿过固定横梁15并固定连接活动相机9;活动相机9在防水电机10的带动下转向拍摄,拍摄更加灵活。
26.支架2上且位于舱体1下侧设置相机防撞架5,相机防撞架5内侧设置固定位相机6,固定位相机6下方两侧设置探照灯7;相机防撞架5侧壁上部设置探照大灯8;相机防撞架5的形状为倒“几”字型,相机防撞架5侧壁上部的内侧设置灯安装板,探照大灯8安装在灯安装板上,固定位相机6安装在相机防撞架5的下部横梁上,相机防撞架5的上端向外凸起部通过螺丝连接支架2。
27.当出现前后失衡的情况时,前后调节下防撞气囊3与上防撞气囊4的位置,从而使该水下机器人在水中处于平衡状态,不会出现前后倾斜的问题,非常实用,调节方便,而且采用气囊防撞,防撞效果好。
28.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1