一种双端控制的水上无人救生装置的制作方法
1.本实用新型涉及水上无人救生技术领域,尤其涉及一种双端控制的水上无人救生装置。
背景技术:
2.水上救生是指人们在水上活动时发生意外事故所采取的救助措施,它是保障游泳者安全的一项重要措施,一般在无人的水域或者的海面上时都需要配有水上无人救生装置来进行救人操作。
3.随着现代科学技术的发展,越来越多的水面上都越来越配有无人救生装置来,现有市面上的无人救生装置也越来越向着高科技和高安全性的方向发展,比如飞行式等。
4.现有市面上的水上无人救生装置在工作使用中存在,传统的技术多采用单一的螺旋旋转式来进行控制救生处理,这样的设计兼容性较差,不方便进行双端控制,不方便对于不同的环境下进行使用。
5.因此,有必要提供一种双端控制的水上无人救生装置解决上述技术问题。
技术实现要素:
6.本实用新型提供一种双端控制的水上无人救生装置,解决了传统的技术多采用单一的螺旋旋转式来进行控制救生处理,这样的设计兼容性较差,不方便进行双端控制,不方便对于不同的环境下进行使用的问题。
7.为解决上述技术问题,本实用新型提供的一种双端控制的水上无人救生装置,包括浮板和稳定机构,所述浮板的上方安装有夹持机构,所述夹持机构包括固定于浮板上表面的定位板,所述定位板的内部开设有限位槽,且限位槽的数量为四个,四个所述限位槽的内部均滑动连接有螺杆,四个所述螺杆的外壁均套设有夹板,四个所述螺杆的外壁且位于四个所述夹板的上方均螺纹连接有螺母。
8.优选的,所述浮板的两侧均固定有浮囊,所述浮板的两侧且位于两个所述浮囊的背部均安装有驱动机构,所述驱动机构包括固定于浮板侧壁的箱体,所述箱体的顶部通过螺栓固定安装有第一电机,所述第一电机的输出轴键槽连接有第一齿轮,所述第一齿轮的外壁啮合连接有第二齿轮,所述第二齿轮的底部键槽连接有转杆,所述转杆的外壁固定有第三齿轮,所述第三齿轮的外壁啮合连接有第四齿轮,所述第四齿轮的外端键槽连接有螺旋桨。
9.优选的,所述转杆的外壁通过轴承与箱体的底部转动连接,所述转杆的底部通过轴承与箱体的内底部转动连接。
10.优选的,所述螺旋桨的外壁通过轴承与箱体的侧壁转动连接,所述第一齿轮的轴心延长线与第二齿轮的轴心延长线之间的夹角为九十度,所述第三齿轮的轴心延长线与第四齿轮的轴心延长线之间的夹角为九十度。
11.优选的,所述稳定机构包括固定于浮板上表面的安装座,所述安装座的侧壁通过
螺栓固定安装有第二电机,所述第二电机的输出轴键槽连接有驱动齿轮,所述驱动齿轮的外壁啮合连接有从动齿轮,所述安装座的内壁转动连接有转辊,所述转辊的外壁套设有钢缆,所述钢缆的底部固定有铁锚。
12.优选的,所述从动齿轮的轴心处通过与转辊的一端键槽连接。
13.与相关技术相比较,本实用新型提供的一种双端控制的水上无人救生装置具有如下有益效果:
14.对本装置设计有夹持机构,用户需要把无人机的底座放置到定位板上,然后用户需要根据无人机的大小在限位槽内滑动控制螺杆,控制完成后用户需要下滑夹板使得每个夹板接触到无人机的底座上,最后用户需要旋转螺母使得夹板受力夹紧无人机,这样的设计使得本装置具备了双端控制的功能,从而使得更加的使用。
附图说明
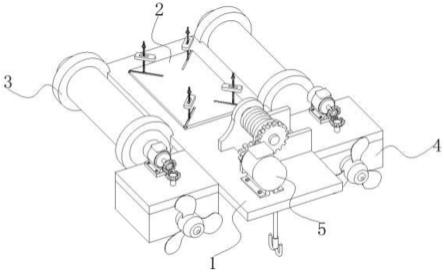
15.图1为本实用新型提供的一种双端控制的水上无人救生装置的一种较佳实施例的结构示意图;
16.图2为图1所示夹持机构结构示意图;
17.图3为图1所示驱动机构剖视结构示意图;
18.图4为图1所示稳定机构结构示意图。
19.图中标号:1、浮板;2、夹持机构;21、定位板;22、限位槽;23、螺杆; 24、夹板;25、螺母;3、浮囊;4、驱动机构;41、箱体;42、第一电机;43、第一齿轮;44、第二齿轮;45、转杆;46、第三齿轮;47、第四齿轮;48、螺旋桨;5、稳定机构;51、安装座;52、转辊;53、钢缆;54、铁锚;55、第二电机;56、驱动齿轮;57、从动齿轮。
具体实施方式
20.下面结合附图和实施方式对本实用新型作进一步说明。
21.请结合参阅图1至图4,其中,图1为本实用新型提供的一种双端控制的水上无人救生装置的一种较佳实施例的结构示意图;图2为图1所示夹持机构结构示意图;图3为图1所示驱动机构剖视结构示意图;图4为图1所示稳定机构结构示意图。一种双端控制的水上无人救生装置,包括浮板1和稳定机构 5,浮板1的上方安装有夹持机构2,夹持机构2包括固定于浮板1上表面的定位板21,定位板21的内部开设有限位槽22,且限位槽22的数量为四个,四个限位槽22的内部均滑动连接有螺杆23,四个螺杆23的外壁均套设有夹板24,四个螺杆23的外壁且位于四个夹板24的上方均螺纹连接有螺母25。
22.浮板1的两侧均固定有浮囊3,浮板1的两侧且位于两个浮囊3的背部均安装有驱动机构4,驱动机构4包括固定于浮板1侧壁的箱体41,箱体41的顶部通过螺栓固定安装有第一电机42,第一电机42的输出轴键槽连接有第一齿轮43,第一齿轮43的外壁啮合连接有第二齿轮44,第二齿轮44的底部键槽连接有转杆45,转杆45的外壁固定有第三齿轮46,第三齿轮46的外壁啮合连接有第四齿轮47,第四齿轮47的外端键槽连接有螺旋桨48,用户需要把无人机的底座放置到定位板21上,然后用户需要根据无人机的大小在限位槽 22内滑动控制螺杆23,控制完成后用户需要下滑夹板24使得每个夹板24接触到无人机的底座上,最后用户需要旋转螺母25使得夹板24受力夹紧无人机。
23.转杆45的外壁通过轴承与箱体41的底部转动连接,转杆45的底部通过轴承与箱体41的内底部转动连接。
24.螺旋桨48的外壁通过轴承与箱体41的侧壁转动连接,第一齿轮43的轴心延长线与第二齿轮44的轴心延长线之间的夹角为九十度,第三齿轮46的轴心延长线与第四齿轮47的轴心延长线之间的夹角为九十度,启动第一电机42 旋转控制第一齿轮43啮合控制第二齿轮44旋转控制转杆45带动第三齿轮46 啮合控制第四齿轮47控制螺旋桨48进行旋转运动从而控制浮板1进行前进运动。
25.稳定机构5包括固定于浮板1上表面的安装座51,安装座51的侧壁通过螺栓固定安装有第二电机55,第二电机55的输出轴键槽连接有驱动齿轮56,驱动齿轮56的外壁啮合连接有从动齿轮57,安装座51的内壁转动连接有转辊52,转辊52的外壁套设有钢缆53,钢缆53的底部固定有铁锚54。
26.从动齿轮57的轴心处通过与转辊52的一端键槽连接,这样的设计可以使得浮板1在放置时可以更加的稳定。
27.本实用新型提供的一种双端控制的水上无人救生装置的工作原理如下:
28.第一步:首先用户需要在浮囊3内充满气体,然后需要把浮板1放置到水面上。
29.第二步:当需要进行使用时用户可以通过两种方式来进行操作浮板1,一种是用户启动第一电机42旋转控制第一齿轮43啮合控制第二齿轮44旋转控制转杆45带动第三齿轮46啮合控制第四齿轮47控制螺旋桨48进行旋转运动从而控制浮板1进行前进运动。
30.第三步:另外一种就是用户需要把无人机的底座放置到定位板21上,然后用户需要根据无人机的大小在限位槽22内滑动控制螺杆23,控制完成后用户需要下滑夹板24使得每个夹板24接触到无人机的底座上,最后用户需要旋转螺母25使得夹板24受力夹紧无人机,这样即可对浮板1进行飞行控制。
31.第四步:当浮板1不使用时用户需要启动第二电机55旋转控制驱动齿轮 56啮合控制从动齿轮57带动转辊52控制钢缆53控制铁锚54下降与水底的泥土进行稳定接触。
32.与相关技术相比较,本实用新型提供的一种双端控制的水上无人救生装置具有如下有益效果:
33.对本装置设计有夹持机构2,用户需要把无人机的底座放置到定位板21 上,然后用户需要根据无人机的大小在限位槽22内滑动控制螺杆23,控制完成后用户需要下滑夹板24使得每个夹板24接触到无人机的底座上,最后用户需要旋转螺母25使得夹板24受力夹紧无人机,这样的设计使得本装置具备了双端控制的功能,从而使得更加的使用。
34.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1