无人捕捞船和捕鱼系统的制作方法
1.本技术实施例涉及捕鱼技术领域,尤其涉及一种无人捕捞船和一种捕鱼系统。
背景技术:
2.海洋或河流内里存在着大量的资源。传统技术中在河内或海洋内进行捕鱼时,通常是在河内或海水内下放渔网,设置在河内的渔网通常是固定不动的,海水内的渔网通常由水面上的船只进行定位,这两种方式渔网固定设置会降低捕鱼效率,渔网通过船只定位会增加渔网的长度,且需要船只能够提供很大的牵引力,会增加捕鱼成本。
技术实现要素:
3.本实用新型旨在至少解决现有技术或相关技术中存在的技术问题之一。
4.为此,本实用新型的第一方面提供了一种无人捕捞船。
5.本实用新型的第二方面提供了一种捕鱼系统。
6.有鉴于此,根据本技术实施例的第一方面提出了一种无人捕捞船,包括:
7.船体;
8.侧摇臂,铰接于所述船体的两侧;
9.驱动组件,连接于所述船体的一侧;
10.前摇臂,连接于所述船体背离于所述船体的一侧;
11.卷绳装置,设置在所述船体的顶部。
12.在一种可行的实施方式中,无人捕捞船还包括:
13.船塔,设置在所述船体的顶部,所述船塔上形成有进气口和排气口;
14.其中,所述船塔包括金属塔体和透明塔体,所述金属塔体连接于所述船体,所述透明塔体连接于所述金属塔体。
15.在一种可行的实施方式中,无人捕捞船还包括:
16.图像采集装置,设置在所述透明上;
17.定位模块,设置在所述船体内;
18.信号发射器,连接于所述图像采集装置和所述定位模块。
19.在一种可行的实施方式中,所述驱动组件包括:
20.依次连接的蓄电池、变频器、电机和齿轮箱;
21.螺旋桨,连接于所述齿轮箱;
22.托底铁,连接于所述船体,所述螺旋桨位于所述托底铁和所述船体之间。
23.在一种可行的实施方式中,无人捕捞船还包括:
24.船舵,连接于所述船体靠近于所述驱动组件的一端。
25.在一种可行的实施方式中,所述船体的两侧形成有配重腔,中部形成有动力舱,所述蓄电池、所述变频器、所述电机和所述齿轮箱设置在所述动力舱内。
26.在一种可行的实施方式中,无人捕捞船还包括:
27.ups电源,设置在所述船体内;
28.卫星导航系统和惯性导航系统,所述ups电源连接于所述卫星导航系统和所述惯性导航系统。
29.根据本技术实施例的第二方面提出了一种捕鱼系统,包括:
30.多个如上述任一技术方案所述的无人捕捞船;
31.母船,所述母船通信连接于所述无人捕捞船。
32.在一种可行的实施方式中,捕鱼系统还包括:
33.控制器,设置在所述母船上,连接于所述驱动组件,用于控制所述驱动组件的开启和驱动方向。
34.相比现有技术,本实用新型至少包括以下有益效果:本技术实施例提供的无人捕捞船包括了船体、侧摇臂、驱动组件、前摇臂和卷绳装置,在需要进行海水内或河内捕鱼时,可以将无人捕捞船下放到河内或海水内,通过卷绳装置可以固定渔网,通过驱动组件可以带动无人捕捞船在水内移动,进而即可带动渔网在水内移动,通过侧摇臂的设置可以调节无人捕捞船在水内运行的平衡和行进方向,便于使无人捕捞船行驶到目标的水域,再结合固定再卷绳装置之上的渔网即可进行捕鱼。
附图说明
35.通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本技术的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
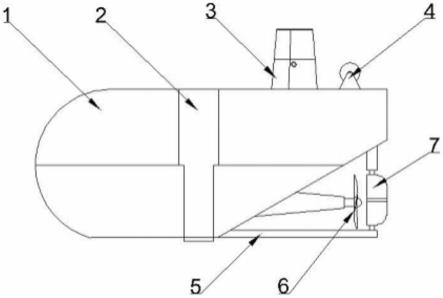
36.图1为本技术提供的一种实施例的无人捕捞船的第一个角度的一种工作状态示意性结构图;
37.图2为本技术提供的一种实施例的无人捕捞船的第一个角度的另一种工作状态示意性结构图;
38.图3为本技术提供的一种实施例的无人捕捞船的第二个角度的一种工作状态示意性结构图;
39.图4为本技术提供的一种实施例的无人捕捞船的第二个角度的另一种工作状态示意性结构图。
40.其中,图1至图4中附图标记与部件名称之间的对应关系为:
41.1船体、2侧摇臂、3船塔、4卷绳装置、5托底铁、6螺旋桨、7船舵、8前摇臂;
42.301透明塔体、302金属塔体、303进气口、304排气口。
具体实施方式
43.为了更好的理解上述技术方案,下面通过附图以及具体实施例对本技术实施例的技术方案做详细的说明,应当理解本技术实施例以及实施例中的具体特征是对本技术实施例技术方案的详细的说明,而不是对本技术技术方案的限定,在不冲突的情况下,本技术实施例以及实施例中的技术特征可以相互组合。
44.如图1至图4所示根据本技术实施例的第一方面提出了一种无人捕捞船,包括:船体1;侧摇臂2,铰接于船体1的两侧;驱动组件,连接于船体1的一侧;前摇臂8,连接于船体1
背离于船体1的一侧;卷绳装置4,设置在船体1的顶部。
45.本技术实施例提供的无人捕捞船包括了船体1、侧摇臂2、驱动组件、前摇臂8和卷绳装置4,在需要进行海水内或河内捕鱼时,可以将无人捕捞船下放到河内或海水内,通过卷绳装置4可以固定渔网,通过驱动组件可以带动无人捕捞船在水内移动,进而即可带动渔网在水内移动,通过侧摇臂2的设置可以调节无人捕捞船在水内运行的平衡和行进方向,便于使无人捕捞船行驶到目标的水域,再结合固定再卷绳装置4之上的渔网即可进行捕鱼。
46.在一种可行的实施方式中,无人捕捞船还包括:船塔3,设置在船体1的顶部,船塔3上形成有进气口303和排气口304。
47.在该技术方案中,无人捕捞船还可以包括船塔3,通过船塔3的设置可以起到平衡船体1的作用;
48.其中,船塔3包括金属塔体302和透明塔体301,金属塔体302连接于船体1,透明塔体301连接于金属塔体302。
49.在一种可行的实施方式中,无人捕捞船还包括:图像采集装置,设置在透明塔体301上;定位模块,设置在船体1内;信号发射器,连接于图像采集装置和定位模块。
50.在该技术方案中,无人捕捞船还可以包括图像采集装置、定位模块和信号发射器,通过图像采集装置的设置可以采集水内的图像信息,通过定位模块的设置可以获知到无人捕捞船在水内所处的位置,再结合信号发射器,可以将水内的图像信息和无人捕捞船的位置信息发送到母船,便于对无人捕捞船的行驶方向和位置进行控制。
51.在一些示例中,图像采集装置可以为包括设置在船体1顶骨的设置360
°
全向摄像头,一对带压缩解压图像的通讯板,定位模块包括设置在控制电路板上的具有gps和北斗信号接收及位置解算功能。通讯板传输摄像头视频及声音和传输交互式控制命令。海洋环境下信号发射器的通讯距离为16海里(30公里)。
52.在一种可行的实施方式中,驱动组件包括:依次连接的蓄电池、变频器、电机和齿轮箱;螺旋桨6,连接于齿轮箱;托底铁5,连接于船体1,螺旋桨6位于托底铁5和船体1之间。
53.在该技术方案中,进一步提供了驱动组件的结构组成,驱动组件包括蓄电池、变频器、电机和齿轮箱,如此设置可以将电能转换为动能,动能在输送到螺旋桨6之上,螺旋桨6的转动即可驱动船体1移动,通过托底铁5的设置可以起到保护螺旋桨6,避免螺旋桨6叶片碰到硬物变形和定位船舵7的作用。
54.在一种可行的实施方式中,无人捕捞船还包括:船舵7,连接于船体1靠近于驱动组件的一端。
55.在一种可行的实施方式中,船体1的两侧形成有配重腔,中部形成有动力舱,蓄电池、变频器、电机和齿轮箱设置在动力舱内。
56.在该技术方案中,进一步提供了船体1的样式,船体1的后端船舱分为3个部分,两侧为压水配重,宽度为600mm,中间为动力舱,分为上下2层,上层全部布置蓄电池,下层从前向后布置变频器、电机、齿轮箱,尾部接螺旋桨6。
57.在一些示例中,为了提高无人捕捞船的使用寿命,蓄电池可以为安全性高的磷酸铁锂电池。电池容量约210kwh,直流输出母线电压500v-600v。充电枪对电池包进行充电。主控单元对高压配电箱进行控制,向电力驱动器输出电能。电池包具有安全状态监测和保护功能。
58.在一些示例中,无人捕捞船的主控单元采用ups不间断电源供电。控制电源由太阳能板,控制电路和ups储能蓄电池组成,其电力来源于动力电池组。ups储能蓄电池采用2路供电方式。平时由动力电池给控制舱ups蓄电池充电。在子船动力电池电量不足时,太阳能板辅助充电以使无人捕捞船有充足的电力用于船控和通讯,视频传输。
59.在一些示例中,船体1具有密封等防水浸能力(半潜式)。
60.在一些示例中,船长7.2米,宽2.2米,型深1米,前端控制舱长度1.2米。
61.在一些示例中,船体1需密封,具有水下穿越5米高海浪的能力。
62.在一种可行的实施方式中,无人捕捞船还包括:ups电源,设置在船体1内;卫星导航系统和惯性导航系统,ups电源连接于卫星导航系统和惯性导航系统。
63.在该技术方案中,无人捕捞船还可以包括ups电源、卫星导航系统和惯性导航系统,组合导航同时融合使用卫星导航系统(gps/bd)和惯性导航系统(ins)。卫星导航系统精度高,但需要能够接收到gnss信号;而惯性导航系统通过惯性器件(陀螺、加速度计等)迭代计算当前位置,可以连续提供航向、姿态等参数,无需和外界通讯,自主性和抗干扰性强。组合导航通常是组合的卫星导航gnss和惯性导航ins。航向精度不低于0.1度(bd信号良好,基线长度≥2m);姿态精度不低于0.1度(bd信号良好);位置精度不高于5米。
64.根据本技术实施例的第二方面提出了一种捕鱼系统,包括:多个如上述任一技术方案的无人捕捞船;母船,母船通信连接于无人捕捞船。
65.本技术实施例提供的捕鱼系统因包括了上述任一技术方案的无人捕捞船,因此该捕鱼系统具备上述技术方案的无人捕捞船的全部有益效果,在此不做赘述。
66.可以理解的是,捕鱼系统包括了无人捕捞船和母船,母船用于收纳盒控制无人捕捞船。
67.本技术实施例提供的无人捕捞船,在需要进行作业时,可将无人捕捞船从母船下放到河里或海里,通过无人捕捞船的驱动组件可以带动无人捕捞船在水里移动,进而即可带动渔网在水里移动,通过侧摇臂的设置可以调节无人捕捞船在水里运行的平衡和行进方向,便于使无人捕捞船行驶到目标的水域,再结合固定再卷绳装置之上的渔网即可进行捕鱼。
68.在一种可行的实施方式中,捕鱼系统还包括:控制器,设置在母船上,连接于驱动组件,用于控制驱动组件的开启和驱动方向。
69.在该技术方案中,捕鱼系统还包括了控制器,控制器可以为设置在母船之上的工控机,工控机可以包括多个控制屏,主显示屏显示遥控船海图,副显示屏显示设备参数,三台影像显示器分别显示船顶部三个摄像头的360全景图像,可以看到无人船的现场情况(视频和声音)。控制器还可以包括设置模拟驾驶方向舵和航速操作手柄或者按钮,其控制方向优选与母船的操作方式相一致,并且需要具有抗电磁干扰能力。工控机可以为plc工控机,plc工控机作为控制主机,实现远程控制和自主驾驶功能。plc具有较大的数据存储能力,防止在水下作业时不能保证实时的数据传输。
70.在一些示例中,无人捕捞船的性能参数为:
71.吨位(排水量):30吨。
72.速度:航速3.1节(1节=1海里/h=1.852公里/h)。
73.续航里程:单次续航里程估算40海里(经济航速)。
74.拖曳能力:拖网作业时,转速990rpm,航速3.1节,网宽73米,网绳320米,水下73米。
75.拖曳航速:主机50kw时转速1350rpm航速10.9节满载。
76.螺旋桨6直径500mm,带导流罩。
77.作业航程内,开启310kw供电,液压收放拖网;航程内(含100海里)满载全速10节。
78.排水量:30吨。
79.在本实用新型中,术语“第一”、“第二”、“第三”仅用于描述的目的,而不能理解为指示或暗示相对重要性;术语“多个”则指两个或两个以上,除非另有明确的限定。术语“安装”、“相连”、“连接”、“固定”等术语均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;“相连”可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
80.本实用新型的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或单元必须具有特定的方向、以特定的方位构造和操作,因此,不能理解为对本实用新型的限制。
81.在本说明书的描述中,术语“一个实施例”、“一些实施例”、“具体实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
82.以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1