一种基于姿态拟合预测的船舶防倾覆自扶正控制方法与流程
本发明涉及海上船舶安全领域,特别涉及一种基于姿态拟合预测的船舶防倾覆自扶正控制方法。
背景技术:
1、船舶航行安全是海上航行中最关键的问题,船舶由于装载不当,载前移位、船体破损、操纵不当及浸水、转舵、风暴、涌浪、海啸或具它强烈环境影响,导致复原力矩小于倾覆力矩而呈翻倒的状态,属严重海事的一种。船舶倾覆会导致排气口、透气和通风口进水,燃油泄漏和舱室进水,往往会造成人命、财产的巨大损失及海洋污染等,因此各领域都在努力探索避免船舶倾覆的有效手段。
2、船舶漂浮于水中,在浮力和重力的综合作用下保持姿态平衡,浮力的作用点为浮心,重力的作用点成为重心。一般来说,对于漂浮的船舶,重心的高度必须低于浮心的高度,两者的高度差叫做初稳性高度;初稳性高度越大,船舶的稳性越好,船舶稳性的好坏决定了船舶抗倾覆的能力的大小。船舶动稳性是指,船舶在水中会受到风与浪的作用,产生力矩使船舶向某一侧偏转,该侧浸没入水中的体积会增加,进而导致该侧浮力增大,即造成浮心的位置向倾覆一侧移动,指向朝内的浮力与向下的重力共同作用,使船舶产生一个力矩,与船舶倾覆的方向相反,使船舶在该力矩的作用下恢复到原来的平衡位置,该力矩就叫做复原力矩。一般来说,将船只能够保证一定回转力臂用于恢复自身姿态稳定的最大角度定义为船只的倾覆临界角度,船舶的倾覆程度只要不超过这个极限值都可以在船舶的复原力矩的作用下恢复平衡状态。
3、基于此原理设计的一些救助艇、救生艇和有特殊要求的小艇,在艇倾覆后可以自行回正,被称为自扶正能力,但是自扶正能力对船舶设计和外部密封均有较高要求,不适用于所有船舶,针对不具备自扶正能力的船舶,自动化领域设计了自扶正控制器用于船舶倾覆后的回正动作;但是无论是自扶正能力,亦或者是自扶正控制器,都是船舶倾覆后才起作用,此时损失已经造成,扶正也只是减少损失而已。船舶海上航行时,左右横摇姿态变化呈现周期性特征,船体固输特性较为稳定,因此可以通过姿态的变化,结合角速度和角加速度推算船舶是否有倾覆风险,然后作出反应。
4、综上所述,需要一种基于姿态拟合预测的船舶防倾覆自扶正控制系统及方法,能够在复杂的海上环境上快速、准确、合理的预测一定时间段内船舶姿态变化趋势,并判断其是否有倾覆风险,对于有倾覆风险的横摇冲击提前作出动作,触发船体两侧的自扶正气囊展开,避免船体倾覆,减少人员伤害和财产损失。
技术实现思路
1、本发明针对现有技术的不足,提供了一种基于姿态拟合预测的船舶防倾覆自扶正控制方法。
2、本发明包含以下步骤:
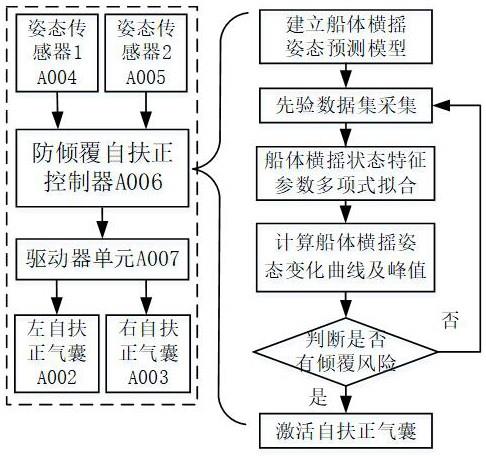
3、步骤100:基于船体运动学和动力学方程建立船体横摇姿态预测模型。
4、步骤200:由姿态传感器采集船体实时姿态数据和惯性数据,以一段时间内的先验冲击数据为输入,带入步骤001中的船体横摇姿态预测模型计算得到船体横摇状态特征参数数据集作为结果;所述的特征参数数据集中的元素包括船型的横摇特征频率和船型的摆动幅值衰减系数。
5、步骤300:以步骤200中的特征参数数据集为输入,基于最小二乘法线性拟合模型估算船体横摇状态特征参数与速度的多项式拟合关系,根据当前速度估算符合当前环境参数的最优船体横摇状态特征参数,得到调整后的船体横摇姿态预测模型。
6、步骤400:将姿态传感器数据输入调整后的船体横摇姿态预测模型,计算得到船体横摇姿态变化曲线;
7、根据曲线峰值判断是否有倾覆风险,对于有倾覆风险的横摇冲击提前作出动作,触发船体两侧的自扶正气囊展开,避免船体倾覆。
8、步骤500:当剧烈冲击导致船体倾覆或者防倾覆自扶正控制系统未有效阻止船体倾覆而导致船体翻转90度且无法依靠回转力臂扶正船体时,达到一定时间累计,防倾覆自扶正控制系统将会依次触发左右自扶正气囊展开保证倾覆船体逐步回正。
9、本发明的具有以下优点:
10、1.本发明基于船体运动学和动力学原理分析船体横摇姿态变化规律,将船体横摇近似处理为简谐运动,通过试验和船型特征参数分析可得到船体横摇状态特征参数,带入预测模型估算船体姿态变化曲线,对于有倾覆风险的横摇冲击提前作出动作,触发船体两侧的自扶正气囊展开,避免船体倾覆,减少人员伤害和财产损失;对于已经倾覆的船体,立刻激活自扶正气囊,扶正船体。
11、2.由于船体的横摇特性会受到船体速度和环境参数的影响,本发明采用基于最小二乘法的线性回归手段以船体航行前一段时间内的数据作为样本输入,结合当前环境条件下船体横摇姿态变化规律,反演拟合得到当前条件下船体横摇状态特征参数,采用调整后的船体横摇状态参数带入预测模型估算船体姿态变化曲线,可以减弱或抵消外部环境变化对船体摇摆特性的影响。
技术特征:
1.一种基于姿态拟合预测的船舶防倾覆自扶正控制方法,其特征在于包含以下步骤:
2.根据权利要求1所述的一种基于姿态拟合预测的船舶防倾覆自扶正控制方法,其特征在于:
3.根据权利要求1所述的一种基于姿态拟合预测的船舶防倾覆自扶正控制方法,其特征在于:
4.根据权利要求1所述的一种基于姿态拟合预测的船舶防倾覆自扶正控制方法,其特征在于:
5.根据权利要求1所述的一种基于姿态拟合预测的船舶防倾覆自扶正控制方法,其特征在于:所述的防倾覆自扶正控制系统由两个姿态传感器、防倾覆自扶正控制器、驱动器单元、左自扶正气囊和右自扶正气囊组成,两个姿态传感器互为冗余,相互校准;两个姿态传感器的输入连接防倾覆自扶正控制器,防倾覆自扶正控制器通过所述驱动器单元控制位于船舶两侧的左自扶正气囊和右自扶正气囊。
6.根据权利要求5所述的一种基于姿态拟合预测的船舶防倾覆自扶正控制方法,其特征在于:步骤401具体是:
技术总结
本发明提供了一种基于姿态拟合预测的船舶防倾覆自扶正控制方法,主要应用于海上船舶安全领域,可搭载在救助艇、救生艇和一些有特殊要求的小艇上。本发明基于船体运动学原理分析辨识船体横摇姿态变化规律,建立船舶姿态预测模型,能够在复杂的海上环境上快速、准确、合理的预测一定时间段内船舶姿态变化趋势,并判断其是否有倾覆风险,对于有倾覆风险的横摇冲击提前作出动作,触发船体两侧的自扶正气囊展开,避免船体倾覆,减少人员伤害和财产损失。
技术研发人员:彭德兴,任才龙,杨纪平,江佳
受保护的技术使用者:江苏佼燕船舶设备有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!