一种用于水下机器人的紧凑型拖缆机构
本发明涉及海洋无人自制水下机器人,尤其是涉及一种用于水下机器人的紧凑型拖缆机构。
背景技术:
1、无人自制水下机器人是近几年发展较快的领域,各种各样新型的无人自制水下机器研发问世。
2、由于我国水下机器人和海洋测量传感器技术还处于技术研发阶段,在研发和水域测试过程中,需要在尾部拖曳尾缆,以保证安全。常用的拖缆方式是在尾部螺旋桨周边安装防护罩或者导管用于栓系缆绳,但是在实际应用的过程中,由于螺旋桨对周边水流的抽吸作用,而缆绳恰好在桨叶周边经过,极容易发生缠绕,进而损坏推进电机和密封装置。
技术实现思路
1、本发明的目的是提供一种用于水下机器人的紧凑型拖缆机构,其结构简单、轴向尺寸小,并且可靠性高。
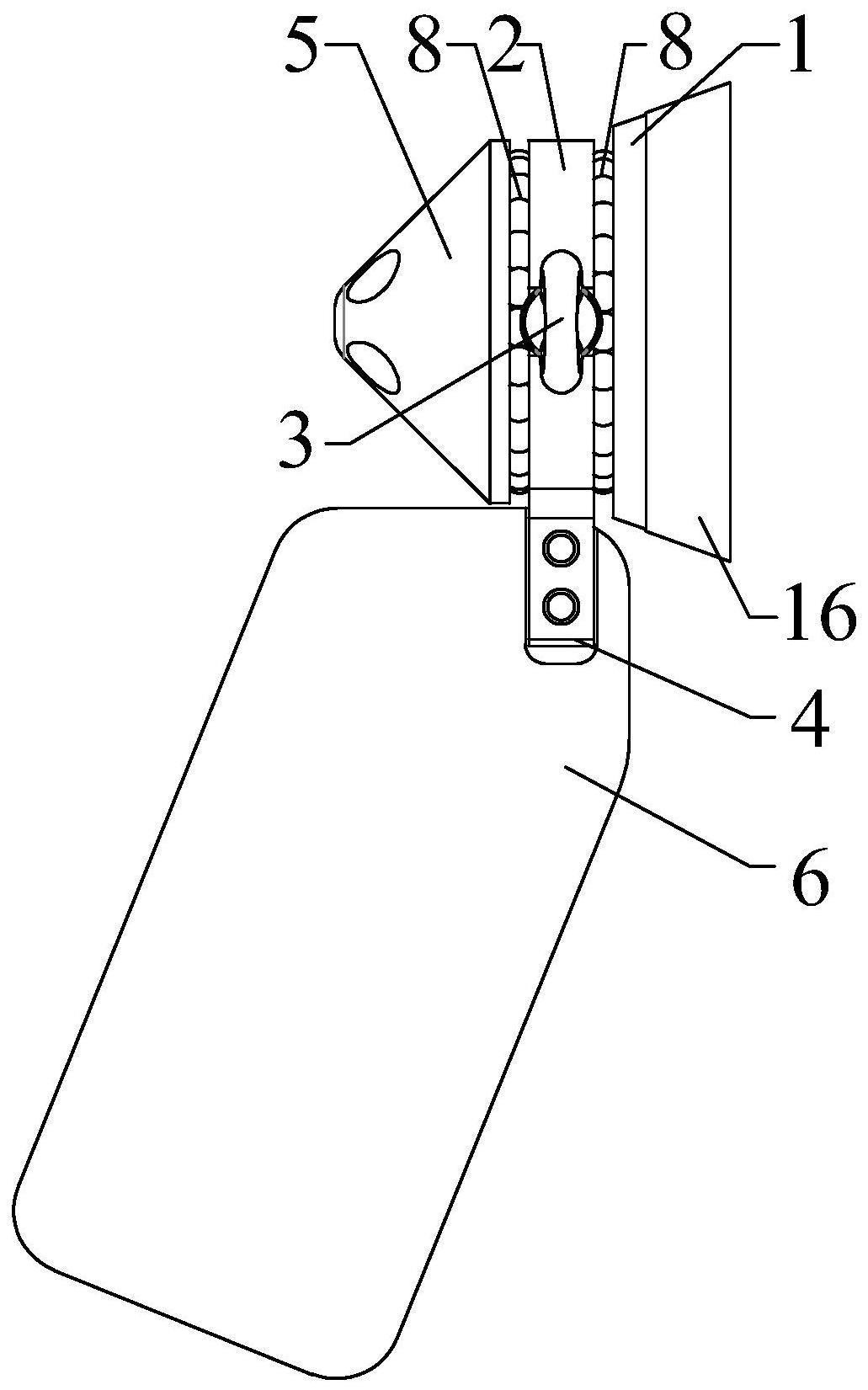
2、为实现上述目的,本发明提供了一种用于水下机器人的紧凑型拖缆机构,包括安装座、设置在所述安装座一侧的尾椎盖和设置在所述安装座另一侧的退扭环,所述退扭环左右两端螺纹连接有吊环,所述退扭环的底部固定设置有吊重板,所述吊重板上螺纹连接有配重块,所述退扭环的一侧设置有尾锥帽。
3、优选的,所述退扭环、所述尾椎盖和所述尾锥帽均与所述安装座同轴心。
4、优选的,所述退扭环的两侧均设置有滚道,所述滚道内安装有陶瓷珠。
5、优选的,所述安装座上设置有第一轴承座和第二轴承座,所述第一轴承座与所述退扭环连接,所述第二轴承座与所述尾椎盖连接,所述尾椎盖上连接有桨毂,所述桨毂上设置有桨叶。
6、优选的,所述第二轴承座的尺寸小于第一轴承座的尺寸,所述第一轴承座和所述第二轴承座均与所述安装座同轴心。
7、优选的,所述第一轴承座上均匀分布有第一限位孔,所述第一限位孔间隙处设置有第一螺纹孔。
8、优选的,所述退扭环上开设有与所述第一轴承座直径相同的安装孔,所述第一轴承座穿过所述安装孔。
9、优选的,所述尾锥帽上设置有第二限位孔和第二螺纹孔,所述第二螺纹孔与所述第一螺纹孔的位置和直径均相同,所述第二限位孔与位于中央位置的所述第一限位孔直径相同。
10、优选的,所述尾椎盖上设置有第三限位孔和第三螺纹孔,所述第三螺纹孔与所述第一螺纹孔的位置和直径均相同,所述第三限位孔与所述第一限位孔的位置和直径均相同。
11、因此,本发明采用上述结构的一种用于水下机器人的紧凑型拖缆机构,其结构简单、轴向尺寸小,并且可靠性高。
12、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种用于水下机器人的紧凑型拖缆机构,其特征在于:包括安装座、设置在所述安装座一侧的尾椎盖和设置在所述安装座另一侧的退扭环,所述退扭环左右两端螺纹连接有吊环,所述退扭环的底部固定设置有吊重板,所述吊重板上螺纹连接有配重块,所述退扭环的一侧设置有尾锥帽。
2.根据权利要求1所述的一种用于水下机器人的紧凑型拖缆机构,其特征在于:所述退扭环、所述尾椎盖和所述尾锥帽均与所述安装座同轴心。
3.根据权利要求2所述的一种用于水下机器人的紧凑型拖缆机构,其特征在于:所述退扭环的两侧均设置有滚道,所述滚道内安装有陶瓷珠。
4.根据权利要求3所述的一种用于水下机器人的紧凑型拖缆机构,其特征在于:所述安装座上设置有第一轴承座和第二轴承座,所述第一轴承座与所述退扭环连接,所述第二轴承座与所述尾椎盖连接,所述尾椎盖上连接有桨毂,所述桨毂上设置有桨叶。
5.根据权利要求4所述的一种用于水下机器人的紧凑型拖缆机构,其特征在于:所述第二轴承座的尺寸小于第一轴承座的尺寸,所述第一轴承座和所述第二轴承座均与所述安装座同轴心。
6.根据权利要求5所述的一种用于水下机器人的紧凑型拖缆机构,其特征在于:所述第一轴承座上均匀分布有第一限位孔,所述第一限位孔间隙处设置有第一螺纹孔。
7.根据权利要求6所述的一种用于水下机器人的紧凑型拖缆机构,其特征在于:所述退扭环上开设有与所述第一轴承座直径相同的安装孔,所述第一轴承座穿过所述安装孔。
8.根据权利要求7所述的一种用于水下机器人的紧凑型拖缆机构,其特征在于:所述尾锥帽上设置有第二限位孔和第二螺纹孔,所述第二螺纹孔与所述第一螺纹孔的位置和直径均相同,所述第二限位孔与位于中央位置的所述第一限位孔直径相同。
9.根据权利要求8所述的一种用于水下机器人的紧凑型拖缆机构,其特征在于:所述尾椎盖上设置有第三限位孔和第三螺纹孔,所述第三螺纹孔与所述第一螺纹孔的位置和直径均相同,所述第三限位孔与的所述第一限位孔的位置和直径均相同。
技术总结
本发明公开了一种用于水下机器人的紧凑型拖缆机构,包括安装座、设置在所述安装座一侧的尾椎盖和设置在所述安装座另一侧的退扭环,和设置在所述安装座一侧的退扭环,所述退扭环左右两端螺纹连接有吊环,所述退扭环的底部固定设置有吊重板,所述吊重板上螺纹连接有配重块,所述退扭环的一侧设置有尾锥帽。本发明采用上述结构的一种用于水下机器人的紧凑型拖缆机构,其结构简单、轴向尺寸小,并且可靠性高。
技术研发人员:廉正光
受保护的技术使用者:天津市职业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!