一种深海空腔抗压检测机器人
本发明涉及抗压检测,具体而言,涉及一种深海空腔抗压检测机器人。
背景技术:
1、为了实现在深海内实施作业,从而需要生产空腔类物体,使得人员可以在空腔内可以操作,其中在空腔完成生产后,为了保证后期在使用时的安全性,从而需要对空腔在深海中的抗压能力进行检测,如申请号为cn202121529876.7一种抗压检测装置,包括底板、支架和放置板,支架、放置板均固定在底板的上方,支架的底部固定连接有电动伸缩杆,电动伸缩杆的伸缩端连接有竖杆,竖杆的底端设有压板;放置板的上方开设有适于放置气垫的放置槽,电动伸缩杆的伸缩端设有空腔,竖杆一端设置在空腔内;空腔内设有第一弹性件,第一弹性件的下端与竖杆连接,其上端与压力传感器连接,压力传感器适于将第一弹性件反馈的压力值传递给外部控制器;外部控制器与电动伸缩杆连接,以记录电动伸缩杆的伸缩次数。上述实用新型的抗压检测装置,通过结合伸缩次数、反馈的压力值变化情况,抗压次数极限计算准确,能够清楚地了解到气垫抗压性能;
2、但是现有的抗压检测机器在检测时一般采用液压杆之类的设备对空腔进行直接的挤压,来检测出空腔的抗压性能,但是在基于深海作业的空腔在进行检测时,因空腔设置环境在深海中,导致空腔外表面均会收到压力,如直接采用现有的抗压检测机器,无法模拟出在深海中的压力,进而导致得出的检测数据不能运用在深海作业中,为此本申请设计了一种可以模拟出在深海中全面施压的检测机器。
技术实现思路
1、针对现有技术的不足,本发明提供了一种深海空腔抗压检测机器人,解决了现有抗压检测机器不能够针对深海环境需求进行检测的问题。
2、为实现上述目的,本发明采取的技术方案为:
3、一种深海空腔抗压检测机器人,包括设备壳体,所述设备壳体内部上下端分别开设有空腔检测槽和蓄水槽,所述空腔检测槽设置在蓄水槽的上方,所述空腔检测槽和蓄水槽之间设置有分隔板,所述分隔板的一侧开设有若干排水孔,所述排水孔与蓄水槽连通;
4、所述设备壳体内部且位于空腔检测槽上下两侧分别设置有用于保证检测稳定的密闭组件,所述空腔检测槽与蓄水槽之间设置有用于模拟压力的增压组件,所述密闭组件的一侧设置有用于控制密闭组件的驱动组件,所述设备壳体外侧设置有电机。
5、作为优选,所述增压组件包括有增压通道,所述增压通道设置在蓄水槽一侧并相互连通,所述增压通道上端设置有分支通道,所述分支通道的两端分别连接有第一输送泵和第二输送泵,所述分支通道另一端安装有单向阀并与空腔检测槽连通。
6、作为优选,所述第一输送泵出口两端分别连接有第二连接管,两侧所述第二连接管一端固定连接有下落通道,两侧所述下落通道一端连接有第一连接管,每个所述第一连接管延伸至空腔检测槽内部,每个所述第一连接管一端分别固定连接有侧位囊,两侧所述侧位囊分别位于空腔检测槽内壁两侧。
7、作为优选,两侧所述下落通道另一端连接有减压通道,两侧所述减压通道分别连接至蓄水槽内,两侧所述减压通道一端均固定安装有控制阀。
8、作为优选,所述设备壳体的上端贯穿开设有放入槽,所述蓄水槽一端设置有用于后期补水的补水口。
9、作为优选,所述密闭组件包括有活动槽和配合槽,每组所述活动槽和配合槽分别开设在空腔检测槽的上下两侧,所述活动槽和配合槽内壁两侧分别开设有配合滑槽,所述活动槽内部设置有活动挡板,所述活动挡板的两侧与配合滑槽滑动配合。
10、作为优选,所述放入槽开设处边沿一体化设置有配合条,两侧所述活动挡板一端均安装有挤压气囊,两侧所述活动挡板内部均开设有转移孔,上侧所述转移孔开设有一组安装槽,下侧所述转移孔开设有若干组安装槽,每组所述安装槽内部设置有第一扩展气囊,每个所述第一扩展气囊均与对应的转移孔开口处连接。
11、作为优选,两侧所述转移孔一侧一体化开设有延伸孔,每个所述延伸孔外侧开设有另一组安装槽且安装槽内部设置有第二扩展气囊;
12、上侧的所述第一扩展气囊和第二扩展气囊与配合条密封贴合,下侧的所述第一扩展气囊和第二扩展气囊与排水孔密封贴合。
13、作为优选,所述驱动组件包括有两个驱动丝杆,每个所述活动挡板板身一侧贯穿开设有螺纹孔,两个所述驱动丝杆杆身均转动设置在配合滑槽内且驱动丝杆杆身与螺纹孔螺纹配合。
14、作为优选,每个所述驱动丝杆一侧开设有密封转槽,所述密封转槽内部转动安装有密封转盘,所述密封转盘的一侧开设有传动槽,所述传动槽内部上下端分别安装有主传动杆和次传动杆,所述主传动杆外侧与电机输出端固定连接,所述主传动杆和次传动杆杆身之间共同设置有传动带;
15、所述主传动杆和次传动杆一端均开设有第一插槽,所述驱动丝杆的一端开设有第二插槽,所述密封转盘中部一体化设置有卡和块,两侧所述卡和块分别与第一插槽和第二插槽配合。
16、与现有技术相比,本发明具有如下有益效果:
17、1、其中为了使得密封的效果得到提升,避免因密封不佳导致检测效果发生偏差,通过活动挡板移动至配合槽中,挤压气囊会与配合槽接触并进行挤压,在转移孔和延伸孔的传输下,使得第一扩展气囊和第二扩展气囊得到介质并向外挤出,其中上侧的第一扩展气囊和第二扩展气囊会与放入槽边沿处的配合条密封贴合,下侧的第一扩展气囊和第二扩展气囊会与排水孔密封贴合,从而使得本申请在可以快速取出和排水的情况下也可以保证稳定的检查操作。
18、2、其中当液体转移至单向阀内,随后液体会堆积在空腔检测槽内实现填水增压,其中为了更加灵活的检测不同尺寸物体,本申请通过控制第二输送泵将液体依次从第二连接管、下落通道、第一连接管转移至侧位囊中,使得两侧侧位囊的体积可以预先控制,便于适配不同尺寸,从而减少检测时填水时长;并且为了可以微调内部压力,通过控制两侧不同位置的控制阀,使得对应位置上的侧位囊内部液体从减压通道流回至蓄水槽中,从而实现减压处理,反之关闭控制阀并继续启动第二输送泵实现微增压操作。
19、3、本发明通过启动第二输送泵将蓄水槽内部的液体转移至增压通道内,随后增压通道将液体分别注入至单向阀和第二输送泵,当液体转移至单向阀内,随后液体会堆积在空腔检测槽内实现填水增压即可进行检测,在检测过程中可直接在本申请内部设置有压力传感器直接得出当前压力,相对于现有设备本申请模拟深海中的压力对空腔表面进行全面施压实现精准检测。
20、4、为了使得本申请在完成使用后每个第一扩展气囊和第二扩展气囊可以复位,在两侧活动挡板复位时,会与配合条贴合,使得第一扩展气囊和第二扩展气囊内部空气会回流至挤压气囊中,实现下一次的检测,下侧的第一扩展气囊和第二扩展气囊会直接与分隔板配合进行复位。
技术特征:
1.一种深海空腔抗压检测机器人,包括设备壳体(1),其特征在于:所述设备壳体(1)内部上下端分别开设有空腔检测槽(5)和蓄水槽(6),所述空腔检测槽(5)设置在蓄水槽(6)的上方,所述空腔检测槽(5)和蓄水槽(6)之间设置有分隔板(7),所述分隔板(7)的一侧开设有若干排水孔(9),所述排水孔(9)与蓄水槽(6)连通;
2.根据权利要求1所述的一种深海空腔抗压检测机器人,其特征在于:所述增压组件(2)包括有增压通道(206),所述增压通道(206)设置在蓄水槽(6)一侧并相互连通,所述增压通道(206)上端设置有分支通道(207),所述分支通道(207)的两端分别连接有第一输送泵(208)和第二输送泵(209),所述分支通道(207)另一端安装有单向阀(210)并与空腔检测槽(5)连通。
3.根据权利要求2所述的一种深海空腔抗压检测机器人,其特征在于:所述第一输送泵(208)出口两端分别连接有第二连接管(211),两侧所述第二连接管(211)一端固定连接有下落通道(203),两侧所述下落通道(203)一端连接有第一连接管(202),每个所述第一连接管(202)延伸至空腔检测槽(5)内部,每个所述第一连接管(202)一端分别固定连接有侧位囊(201),两侧所述侧位囊(201)分别位于空腔检测槽(5)内壁两侧。
4.根据权利要求3所述的一种深海空腔抗压检测机器人,其特征在于:两侧所述下落通道(203)另一端连接有减压通道(204),两侧所述减压通道(204)分别连接至蓄水槽(6)内,两侧所述减压通道(204)一端均固定安装有控制阀(205)。
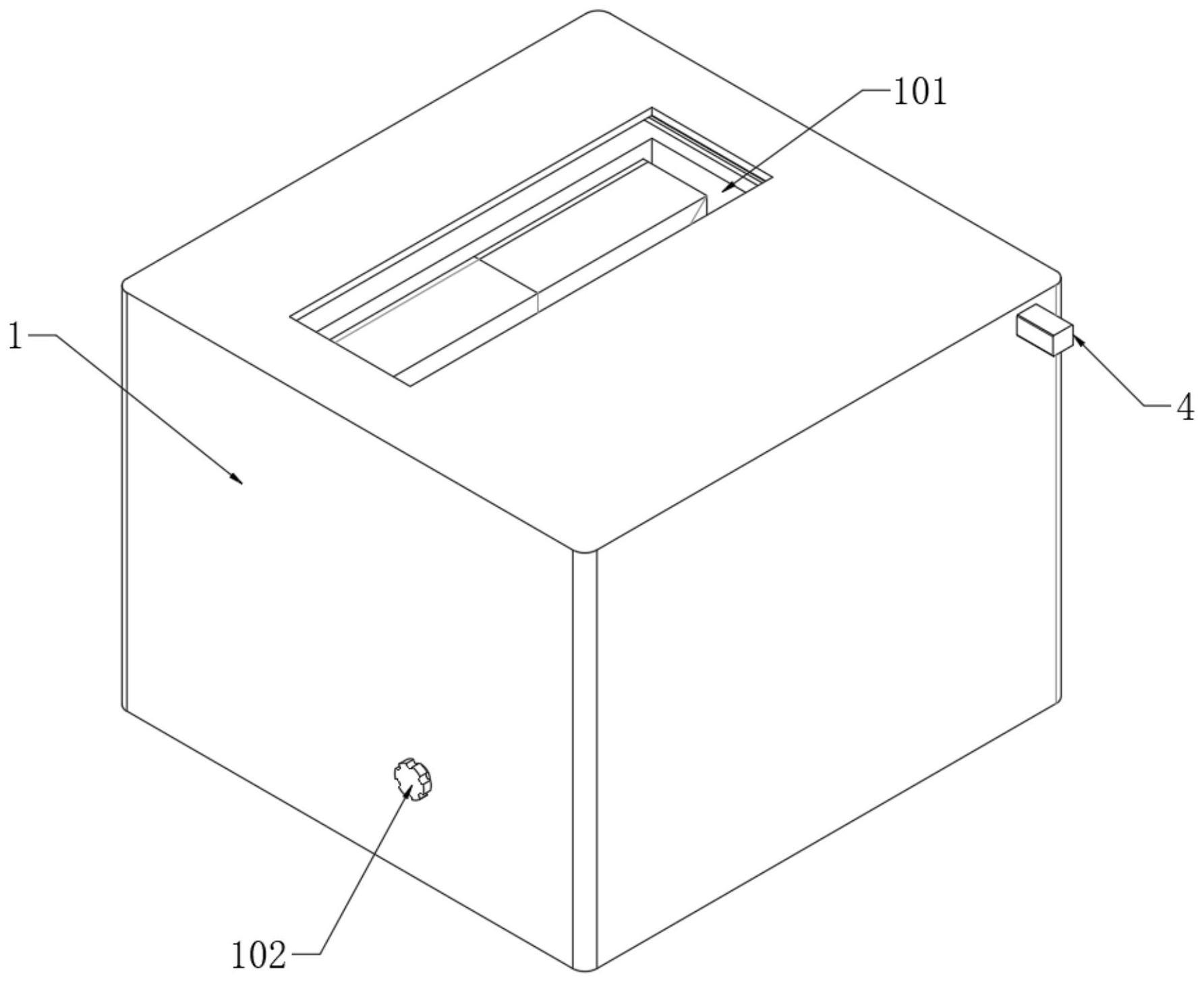
5.根据权利要求1所述的一种深海空腔抗压检测机器人,其特征在于:所述设备壳体(1)的上端贯穿开设有放入槽(101),所述蓄水槽(6)一端设置有用于后期补水的补水口(102)。
6.根据权利要求5所述的一种深海空腔抗压检测机器人,其特征在于:所述密闭组件(3)包括有活动槽(301)和配合槽(303),每组所述活动槽(301)和配合槽(303)分别开设在空腔检测槽(5)的上下两侧,所述活动槽(301)和配合槽(303)内壁两侧分别开设有配合滑槽(304),所述活动槽(301)内部设置有活动挡板(302),所述活动挡板(302)的两侧与配合滑槽(304)滑动配合。
7.根据权利要求6所述的一种深海空腔抗压检测机器人,其特征在于:所述放入槽(101)开设处边沿一体化设置有配合条(10),两侧所述活动挡板(302)一端均安装有挤压气囊(3021),两侧所述活动挡板(302)内部均开设有转移孔(3022),上侧所述转移孔(3022)开设有一组安装槽(3023),下侧所述转移孔(3022)开设有若干组安装槽(3023),每组所述安装槽(3023)内部设置有第一扩展气囊(3024),每个所述第一扩展气囊(3024)均与对应的转移孔(3022)开口处连接。
8.根据权利要求7所述的一种深海空腔抗压检测机器人,其特征在于:两侧所述转移孔(3022)一侧一体化开设有延伸孔(3025),每个所述延伸孔(3025)外侧开设有另一组安装槽(3023)且安装槽(3023)内部设置有第二扩展气囊(3026);
9.根据权利要求8所述的一种深海空腔抗压检测机器人,其特征在于:所述驱动组件(8)包括有两个驱动丝杆(801),每个所述活动挡板(302)板身一侧贯穿开设有螺纹孔(3027),两个所述驱动丝杆(801)杆身均转动设置在配合滑槽(304)内且驱动丝杆(801)杆身与螺纹孔(3027)螺纹配合。
10.根据权利要求9所述的一种深海空腔抗压检测机器人,其特征在于:每个所述驱动丝杆(801)一侧开设有密封转槽(807),所述密封转槽(807)内部转动安装有密封转盘(808),所述密封转盘(808)的一侧开设有传动槽(802),所述传动槽(802)内部上下端分别安装有主传动杆(803)和次传动杆(805),所述主传动杆(803)外侧与电机(4)输出端固定连接,所述主传动杆(803)和次传动杆(805)杆身之间共同设置有传动带(804);
技术总结
本发明提供一种深海空腔抗压检测机器人,涉及抗压检测技术领域,包括设备壳体,所述设备壳体内部上下端分别开设有空腔检测槽和蓄水槽,所述空腔检测槽设置在蓄水槽的上方,所述空腔检测槽和蓄水槽之间设置有分隔板,所述分隔板的一侧开设有若干排水孔,所述排水孔与蓄水槽连通;本发明通过启动第二输送泵将蓄水槽内部的液体转移至增压通道内,随后增压通道将液体分别注入至单向阀和第二输送泵,当液体转移至单向阀内,随后液体会堆积在空腔检测槽内实现填水增压即可进行检测,在检测过程中可直接在本申请内部设置有压力传感器直接得出当前压力,相对于现有设备本申请模拟深海中的压力对空腔表面进行全面施压实现精准检测。
技术研发人员:潘剑飞,李丽,张宙,王璨,洪岳
受保护的技术使用者:深圳大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!