城市洪涝救援机器人
本发明属于救援机器人领域,具体涉及一种城市洪涝救援机器人。
背景技术:
1、近几年,受全球气候变化影响,我国大部分城市洪涝灾害频繁发生,严重影响着城市经济发展,威胁着人民群众的生命财产安全。从洪涝发生到救援结束时间十分宝贵,以传统的救援方式,需要大量人力和物力,大大小小的城市道路和小街小巷,大大降低了搜救效率,耗费过多的救援黄金时间,导致救援不及时、不彻底。
2、洪涝救援机器人是一种专门设计用于灾害救援的机器人。目前,洪涝救援机器人通常采用以下几种形式:1.水面机器人:可携带摄像机和遥控器,适用于浅水区域的搜寻和救援。2.水下机器人:包括载人和无人两种类型,可通过搭载水下摄像机和机械臂完成搜寻、打捞、修复等任务。3.无人机:可以在空中进行水面巡查和搜寻,通过搭载红外线、热成像等设备,可快速发现被淹没的人员和物品。
3、现有的水面救援机器人通常只能移动到救援目标周围完成救援任务,例如公开号为cn215663933u公开的一种水面救援机器人,其可行进到落水人员周围,需要落水人员自主爬上船体,进而带动落水人员向岸边靠近,进而对落水人员进行搜救;对于船体无法靠近的落水人员,或者无法自主爬上救援船的人员和物品无法开展救援工作。
4、本发明设计了一种城市洪涝灾害救援机器人,该机器人相比传统的人工救援方式,具有速度快、效率高、安全性高等优势,可以有效提高救援的效率和减少人力和财力的浪费,从而更好地保护人民生命财产安全。
技术实现思路
1、本发明的目的是:提供一种城市洪涝灾害救援机器人,该机器人能够在水面上自主行进,通过将救援网弹射至救援对象处,利用救援网使救援对象漂浮在水面上方,进而完成救援任务。
2、为实现上述技术目的,本发明采用的技术方案如下:
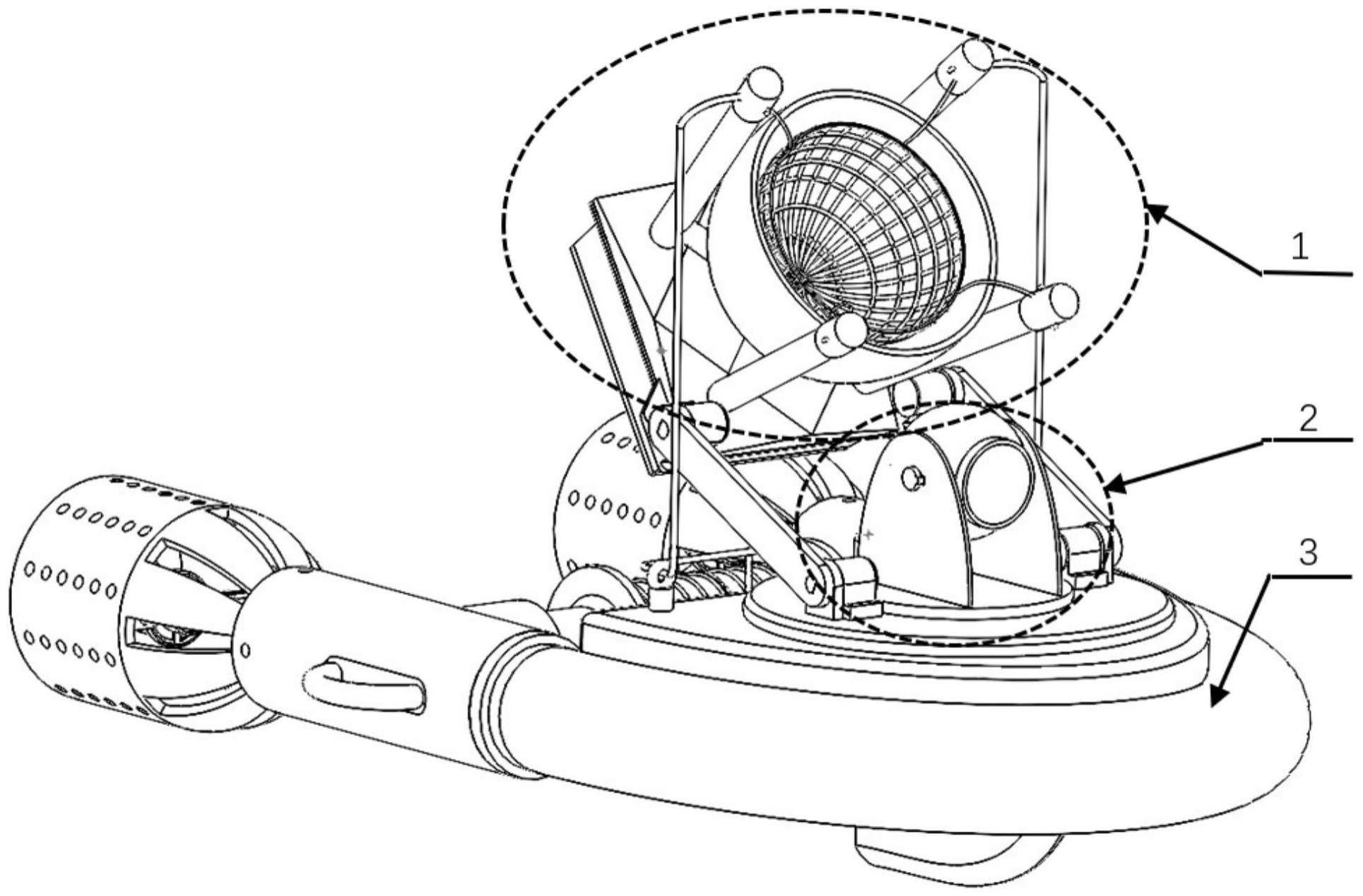
3、本发明的城市洪涝救援机器人,至少包括可在水面上行进的船身部分和用于将救援网弹射至救援对象处的弹射部分;所述弹射部分包括弹射箱体、弹射管、节点、弹头、弹头弹射机构和弹射触发机构;所述弹射管固定设置于弹射箱体外;所述节点可分离式安装于弹射管外端并与救援网相连;所述弹头安装于弹射管内部;所述弹头弹射机构包括弹射弹簧、弹头连接绳、凸轮舵机、收线电机、离合器和收线轴ⅰ;所述弹射弹簧置于弹头下方;所述凸轮舵机、收线电机、离合器和收线轴ⅰ安装于弹射箱体内,所述凸轮舵机用于控制收线电机移动,使收线电机的输出端与离合器输入端结合或分离;所述离合器输出端连接于收线轴ⅰ;所述收线轴ⅰ通过弹头连接绳连接于弹头,以拉动弹头移动使弹射弹簧压缩;所述弹射触发机构包括横管、卡子、卡子弹簧、卡子连接绳和触发舵机;所述横管固定于弹射管侧部;所述卡子和卡子弹簧设置于横管内,所述卡子弹簧用于将卡子推出至弹射管以卡住弹头;所述触发舵机设置于弹射箱体内,触发舵机输出端通过卡子连接绳连接于卡子;所述触发舵机通过卡子连接绳将卡子拉回横管使弹头弹起并撞击节点,使节点与弹射管分离并带动救援网弹出;
4、进一步,所述船身部分设有云台和用于驱动云台转动的云台驱动舵机;所述弹射箱体通过连杆与云台连接;所述弹射箱体和连杆、连杆和云台之间均设有舵机以调节弹射箱体的仰角;
5、进一步,所述船体部分包括船头、船身和船尾;所述云台设置于船头上方,船头下方设有控制船体前进方向的船舵;所述船身设有收线轴ⅱ,收线轴ⅱ通过牵引绳与救援网相连;所述船尾设有推进器;
6、进一步,所述离合器包括若干依次啮合的减速齿轮;第一级减速齿轮端面固定有从动摩擦片;所述收线电机的输出端固定有与之配合的主动摩擦片;
7、进一步,所述收线电机安装于一电机座内并可沿电机座滑动;所述电机座内设有用于推动收线电机始终与凸轮舵机的凸轮保持接触的压紧弹簧;
8、进一步,所述机器人还包括设置于船身部分上的摄像部分;所述摄像部分包括设置于云台上的支架和设置于支架上的摄像头;
9、进一步,所述救援网包括网格状的绳体和设置于网格内的气垫;所述气垫遇水后发生膨胀。
10、本发明的有益效果为:采用本发明的城市洪涝救援机器人进行救援作业时;通过触发机构解除卡子对弹头的锁定,使弹头在弹射弹簧的作用下弹出并撞击节点,节点脱离弹射管并携带救援网弹射至救援对象位置;然后通过收线轴ⅱ进行收线,使救援网前两个节点向回收拢,使救援网置于被救人员身下,然后,救援网遇水充气,成功营救落水人员。因此,相比现有的水面救援机器人而言,本发明的救援机器人能够极大的提高救援的范围,从而更好、更快速地完成救援任务。
技术特征:
1.一种城市洪涝救援机器人,其特征在于:至少包括可在水面上行进的船身部分和用于将救援网弹射至救援对象处的弹射部分;
2.根据权利要求1所述的城市洪涝救援机器人,其特征在于:所述船身部分设有云台和用于驱动云台转动的云台驱动舵机;所述弹射箱体通过连杆与云台连接;所述弹射箱体和连杆、连杆和云台之间均设有舵机以调节弹射箱体的仰角。
3.根据权利要求2所述的城市洪涝救援机器人,其特征在于:所述船体部分包括船头、船身和船尾;所述云台设置于船头上方,船头下方设有控制船体前进方向的船舵;所述船身设有收线轴ⅱ,收线轴ⅱ通过牵引绳与救援网相连;所述船尾设有推进器。
4.根据权利要求1所述的城市洪涝救援机器人,其特征在于:所述离合器包括若干依次啮合的减速齿轮;第一级减速齿轮端面固定有从动摩擦片;所述收线电机的输出端固定有与之配合的主动摩擦片。
5.根据权利要求1所述的城市洪涝救援机器人,其特征在于:所述收线电机安装于一电机座内并可沿电机座滑动;所述电机座内设有用于推动收线电机始终与凸轮舵机的凸轮保持接触的压紧弹簧。
6.根据权利要求1所述的城市洪涝救援机器人,其特征在于:所述机器人还包括设置于船身部分上的摄像部分;所述摄像部分包括设置于云台上的支架和设置于支架上的摄像头。
7.根据权利要求2所述的城市洪涝救援机器人,其特征在于:所述救援网包括网格状的绳体和设置于网格内的气垫;所述气垫遇水后发生膨胀。
技术总结
本发明公开了一种城市洪涝救援机器人,至少包括可在水面上行进的船身部分和用于将救援网弹射至救援对象处的弹射部分;所述弹射部分包括弹射箱体、弹射管、节点、弹头、弹头弹射机构和弹射触发机构;所述弹头弹射机构包括弹射弹簧、弹头连接绳、凸轮舵机、收线电机、离合器和收线轴Ⅰ;所述弹射触发机构包括横管、卡子、卡子弹簧、卡子连接绳和触发舵机;进行救援时,弹射触发机构解除对弹头的锁止,弹头在弹射弹簧的作用下撞击节点,使节点携带救援网弹出至救援对象处,利用救援网使救援对象漂浮在水面上方,进而完成救援任务。
技术研发人员:龙樟,方祥丞,陈锘弋,唐鹏,谌贵辉,游东潘,李波,林伟
受保护的技术使用者:西南石油大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!