一种应用于水下机器人的无轴矢量推进器
本发明属于水下机器人推进器,具体涉及一种应用于水下机器人无轴矢量推进器。
背景技术:
1、水下机器人(auv)由于其体积小,机动性好且隐蔽性高,能很好的完成海底管线铺设、海底考察、水下设备维修等民用和海底排雷、侦察、搜救等军用方面的任务。在水下机器人低速情况下,常规的推进器加方向舵操纵水下机器人的方式难以提供足够的转向力,因此需要矢量推进器来提高水下机器人的机动性。
2、目前,国内外在螺旋桨式矢量推进器的设计上,主要分为传统螺旋桨式、变矢量螺旋桨式和吊舱式推进器。传统螺旋桨式矢量推进器是在水下潜器的周围布置多个固定螺旋桨或者固定螺旋桨和二元矢量螺旋桨搭配式组合,由于其非流线型并且所使用的部分固定螺旋桨的利用率不高,所以其局限性较大。变矢量螺旋桨推进器是一种在桨叶旋转一周的过程中,叶片螺距角作周期性变化的特种推进器,其结构复杂且不利于维护。吊舱式推进器的原理是把船舶的推进器密封于一个吊舱内,这种方式集成了传统船舶推进装置的固定动力源和方向舵的功能,节省了大量的空间,但其需要单独的舱室,易影响到水下机器人的操纵性,适用范围窄,因此仅适用于远洋船只和破冰船只等。
技术实现思路
1、本发明的目的在于提出一种应用于水下机器人的无轴矢量推进器,解决现有技术存在的局限性大、结构复杂不利于维修以及适用范围窄的问题;实现机器人三自由度运动的水下推进。
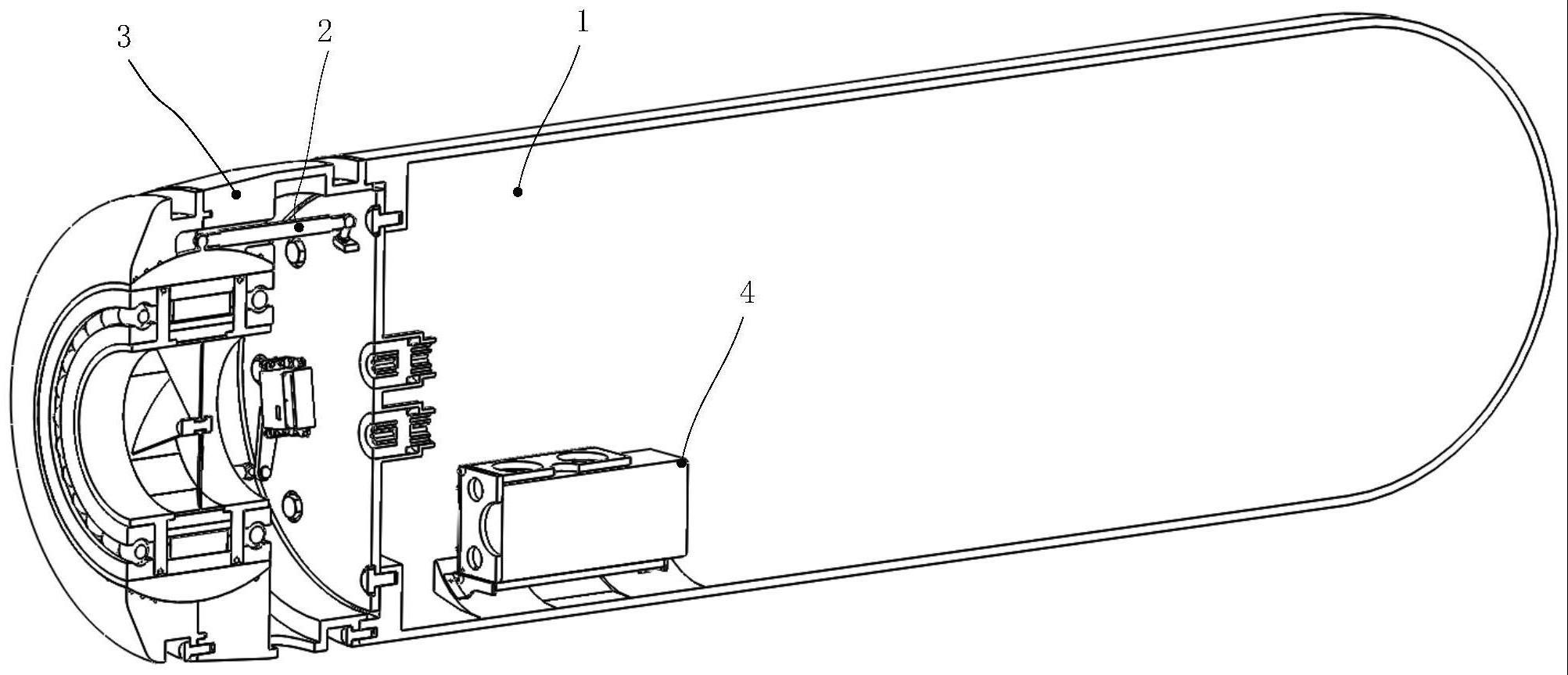
2、为实现上述目的,本发明的一种应用于水下机器人的无轴矢量推进器包括设置在机器人主体端部的动力驱动机构、设置在机器人主体和动力驱动机构之间的矢量调节机构以及供电单元,通过所述供电单元为所述动力驱动机构以及矢量调节机构供电;
3、所述动力驱动机构包括:
4、驱动机构外壳,所述驱动机构外壳一端和所述机器人主体密封固定连接的驱动机构外壳,所述驱动机构外壳内表面整体为球面;
5、设置在所述驱动机构外壳内部并和内表面的球面形成球面副的驱动机构密封壳,通过所述矢量调节机构调节驱动机构密封壳相对驱动机构外壳做球面运动;
6、设置在所述驱动机构密封壳内并和驱动机构密封壳内壁面固定连接的转动电机,通过所述驱动机构密封壳对所述转动电机密封;
7、以及螺旋桨,所述螺旋桨烧接于所述转动电机上,通过所述转动电机带动所述螺旋桨转动。
8、所述机器人主体包括:
9、圆筒状的控制舱段壳体;
10、以及可拆卸垂直固定连接在控制舱段壳体内部一端的尾部段壳体,所述动力驱动机构连接在控制舱段壳体的尾部段壳体所在一端。
11、所述矢量调节机构包括三组圆周均布的结构相同的矢量调节单元,每组所述矢量调节单元包括:
12、通过舵机固定件连接在机器人主体的尾部段壳体外壁面的舵机;
13、一端和所述舵机输出端连接的摇臂;
14、一端和所述摇臂另一端转动配合的连接轴;
15、一端和所述连接轴另一端形成球面副配合的连杆;
16、以及设置在所述驱动机构密封壳外壁面上的球铰,所述连杆另一端和所述球铰形成球面副配合。
17、所述驱动机构外壳上设置有与三组矢量调节单元的连杆对应的三个圆柱体槽,所述圆柱体槽为所述连杆运动提供运动空间,所述运动驱动机构外壳包括:
18、下壳体,所述下壳体的一端和所述机器人主体的控制舱段壳体一端可拆卸密封固定连接;
19、和所述下壳体另一端可拆卸连接的上壳体;
20、以及圆周均布在所述下壳体侧壁上的三个进水孔,所述进水孔和所述圆柱体槽交错设置。
21、所述驱动机构密封壳包括:
22、电机外壳,所述电机外壳外表面为球形,和所述驱动机构外壳形成球面副,所述矢量调节机构的球铰设置在所述电机外壳的外壁面;
23、对称设置的两个电机支撑结构,所述电机支撑结构位于所述电机外壳内部;
24、两个密封o形圈,所述密封o形圈安装于电机支撑结构与电机外壳接触支撑的轴肩凹槽;
25、以及两个支撑轴承,所述支撑轴承设置在所述电机支撑结构和所述电机外壳之间,所述支撑轴承外圈安装于电机外壳内表面,所述支撑轴承内圈和所述电机支撑结构固定。
26、所述转动电机包括由外圈向内圈依次设置的多极绕组定子、定子绕组、永磁体和永磁体转子;所述多极绕组定子的外壁面与驱动机构密封壳内壁面固定连接,所述多极绕组定子的内壁面安装有定子绕组,所述永磁体为四个形状相同永磁铁,烧接于永磁体转子外壁面,所述永磁体转子与电机支撑结构固定连接。
27、所述螺旋桨包括:
28、设置在所述转动电机轴线位置的桨中轴;
29、以及圆周均布的四个结构相同的桨叶,所述桨叶均布于永磁体转子内壁面,与永磁体转子固定连接,且桨叶均烧接于螺旋桨中轴上。
30、所述供电单元包括设置在机器人主体的控制舱段壳体内的电池以及安装于水下机器人主体尾部段壳体上的水密接插件a和水密接插件b,所述电池通过水密接插件a与所述动力驱动机构连接供电,所述电池通过水密接插件b与所述矢量调节机构连接供电。
31、本发明的有益效果为:本发明的一种应用于水下机器人的无轴矢量推进器中将螺旋桨内置于动力驱动机构中,可有效避免螺旋桨与水下植物等的缠绕,提高水下机器人的可靠性和作业稳定性。由舵机、摇臂、连接轴、连杆和球铰组成的矢量调节机构,结构可靠,实施方便,易于实现矢量推进。本发明中无传统螺旋桨轴,有效提高了推进器的推进效率,易于实现水下机器人的长航时作业。本发明将应用于水下机器人的无轴矢量推进器模块化,可应用于不同结构类型和作业类型的水下机器人。
技术特征:
1.一种应用于水下机器人的无轴矢量推进器,其特征在于,包括设置在机器人主体(1)端部的动力驱动机构(3)、设置在机器人主体(1)和动力驱动机构(3)之间的矢量调节机构(2)以及供电单元(4),通过所述供电单元(4)为所述动力驱动机构(3)以及矢量调节机构(2)供电;
2.根据权利要求1所述的一种应用于水下机器人的无轴矢量推进器,其特征在于,所述机器人主体(1)包括:
3.根据权利要求2所述的一种应用于水下机器人的无轴矢量推进器,其特征在于,所述矢量调节机构(2)包括三组圆周均布的结构相同的矢量调节单元,每组所述矢量调节单元包括:
4.根据权利要求3所述的一种应用于水下机器人的无轴矢量推进器,其特征在于,所述驱动机构外壳(301)上设置有与三组矢量调节单元的连杆(205)对应的三个圆柱体槽,所述圆柱体槽为所述连杆(205)运动提供运动空间,所述运动驱动机构外壳(301)包括:
5.根据权利要求1所述的一种应用于水下机器人的无轴矢量推进器,其特征在于,所述驱动机构密封壳(302)包括:
6.根据权利要求5所述的一种应用于水下机器人的无轴矢量推进器,其特征在于,所述转动电机(303)包括由外圈向内圈依次设置的多极绕组定子(3031)、定子绕组(3032)、永磁体(3033)和永磁体转子(3034);所述多极绕组定子(3031)的外壁面与驱动机构密封壳(302)内壁面固定连接,所述多极绕组定子(3031)的内壁面安装有定子绕组(3032),所述永磁体(3033)为四个形状相同永磁铁,烧接于永磁体转子(3034)外壁面,所述永磁体转子(3034)与电机支撑结构(3024)固定连接。
7.根据权利要求6所述的一种应用于水下机器人的无轴矢量推进器,其特征在于,所述螺旋桨(304)包括:
8.根据权利要求1-7中任意一项所述的一种应用于水下机器人的无轴矢量推进器,其特征在于,所述供电单元(4)包括设置在机器人主体(1)的控制舱段壳体(102)内的电池(401)以及安装于水下机器人主体(1)尾部段壳体(101)上的水密接插件a(402)和水密接插件b(403),所述电池(401)通过水密接插件a(402)与所述动力驱动机构(3)连接供电,所述电池(401)通过水密接插件b(403)与所述矢量调节机构(2)连接供电。
技术总结
本发明的一种应用于水下机器人的无轴矢量推进器属于水下机器人推进器技术领域,目的在于解决现有技术存在的局限性大、结构复杂不利于维修以及适用范围窄的问题。本发明包括设置在机器人主体端部的动力驱动机构、设置在机器人主体和动力驱动机构之间的矢量调节机构以及供电单元,通过供电单元为动力驱动机构以及矢量调节机构供电;动力驱动机构包括:驱动机构外壳,设置在驱动机构外壳内部并和内表面的球面形成球面副的驱动机构密封壳,设置在驱动机构密封壳内并和驱动机构密封壳内壁面固定连接的转动电机以及烧接于转动电机上的螺旋桨;通过矢量调节机构调节驱动机构密封壳相对驱动机构外壳做球面运动;通过转动电机带动螺旋桨转动。
技术研发人员:陈延礼,曹哲,张学兵,白桂强,胡鑫玉
受保护的技术使用者:吉林大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!