一种用于水下目标打捞的液压支撑结构的制作方法
本发明涉及水下打捞设备,特别涉及一种用于水下目标打捞的液压支撑结构。
背景技术:
1、在对水下目标进行打捞时,通常会使用到水下机器人,水下机器人主体上安装有支撑结构,而水下机器人主体上的支撑结构主要作用是方便水下机器人在水底进行作业。
2、传统的用于水下目标打捞的水下机器人上的支撑结构在使用时,虽然能够辅助水下机器人在水底进行作业,但是水下机器人上的支撑结构在与水底接触后只能起到一个支撑作用,不能辅助水下机器人进行精准位移,导致水下机器人在水底作业时仍需采用推进器进行位移,而水下机器人通过推进器在水底位移时,由于推进器在运作时容易将水底淤泥搅浑导致水底视线变得模糊,从而无法很好的观察作业,而且通过推进器的位移的精度较差,操控难度较大,再者由于传统水下机器人上的支撑结构具有一定重量,从而使得水下机器人在水中向上移动时只通过推进器的推进作用,从而在深水中完成作业后,很难快速的向上移动,从而降低了水下机器人的上移效率。
技术实现思路
1、有鉴于此,本发明提供一种用于水下目标打捞的液压支撑结构,其通过液压支撑部与左右移动机构的配合,从而使得水下机器人主体在水底作业过程中进行位移时无需通过推进器即可轻松实现位移,从而有效避免了推进器在运作时将水底淤泥搅浑导致水底视线变得模糊的现象,再者,通过浮力调节部的设置,使得水下机器人主体在水中向上移动时,能够快速的向上移动,从而提高了水下机器人主体的上移效率。
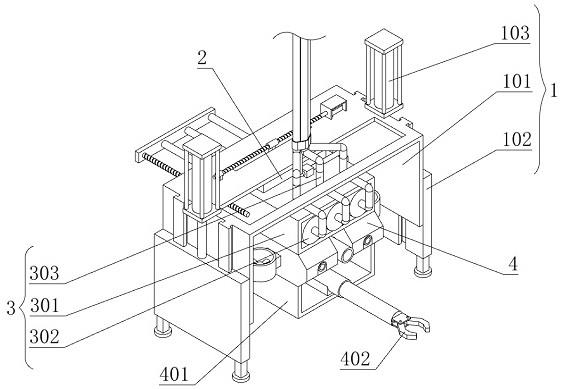
2、本发明提供了一种用于水下目标打捞的液压支撑结构的目的与功效,具体包括:液压支撑部;所述液压支撑部内侧顶部设有左右移动机构,且左右移动机构底部安装有浮力调节部;所述浮力调节部底部安装有水下机器人主体;所述液压支撑部包括匚字形支撑板、滑动支撑块和液压缸,所述匚字形支撑板左右两端面均设有两个t型滑条,且匚字形支撑板左右两端面均通过t型滑条滑动连接有一个滑动支撑块,且每个滑动支撑块下端均固定安装有两根支腿,所述液压缸的数量为两个,且两个液压缸分别安装在匚字形支撑板顶端面左右两侧,两个液压缸的伸缩杆下端分别与两个滑动支撑块固定连接。
3、进一步的,所述左右移动机构包括移动块、螺纹筒、调节电机和调节螺杆,所述移动块滑动连接在匚字形支撑板内部顶端面,且移动块上端面固定连接有螺纹筒;所述调节电机安装在匚字形支撑板上端面,且调节电机的转轴固定连接有调节螺杆,并且调节螺杆与螺纹筒螺纹连接。
4、进一步的,所述浮力调节部包括矩形壳体、抽气筒、抽气软管、导向滑筒、滑动杆和活塞,所述矩形壳体固定连接在移动块底端面,且矩形壳体内部呈均匀状安装有三个抽气筒,每个抽气筒前端均连接有一根抽气软管,且每个抽气筒内部后端均固定安装有一个导向滑筒;每个所述导向滑筒内部滑动连接有一根滑动杆,且每根滑动杆前端均设有一个活塞,活塞与抽气筒内壁紧密接触,三根滑动杆后端固定连接有矩形板。
5、进一步的,所述浮力调节部还包括驱动电机、驱动螺杆、固定支板、螺母、第一同步带轮和第二同步带轮,所述驱动电机安装在矩形壳体左端面后侧,且驱动电机的转轴固定连接有第一同步带轮;所述滑动杆后端的矩形板前端面左侧固定连接有驱动螺杆,且驱动螺杆贯穿固定支板;所述固定支板固定安装在矩形壳体左端面,且固定支板后端面转动连接有螺母,并且螺母与驱动螺杆螺纹连接,螺母外部固定连接有第二同步带轮,且第二同步带轮与第一同步带轮通过同步带传动连接。
6、进一步的,所述水下机器人主体底部安装有匚字形支板,且匚字形支板内侧下端安装有夹持装置;所述水下机器人主体连接有水下电缆,且水下电缆固定连接在矩形壳体外部。
7、进一步的,所述驱动电机、调节电机外部均设有密封防水罩,且驱动电机、调节电机均通过水下电缆与外部控制装置电性连接。
8、进一步的,所述夹持装置为可伸缩的机械手,水下电缆和三根抽气软管外部套接有绑紧带。
9、进一步的,当所述水下机器人主体位于水下时,三根抽气软管上端均位于水面上方部位。
10、进一步的,所述匚字形支撑板顶端面前侧开设有矩形通口,且矩形通口位于水下机器人主体上的前侧推进器正上方。
11、进一步的,当所述滑动杆带着活塞向后移动时,外部空气经抽气软管进入到抽气筒内部。
12、有益效果:1.本发明通过液压支撑部与左右移动机构的配合,当水下机器人主体在水底作业过程中需要进行左右位移时,通过左右移动机构,带着浮力调节部和水下机器人主体左右微量移动,然后当水下机器人主体需要进行上下移动时,通过控制两个液压缸的伸缩杆进行伸缩运动,使得两个滑动支撑块在匚字形支撑板左右两侧进行上下移动,从而使匚字形支撑板带着浮力调节部和水下机器人主体上下微量移动,从而使得水下机器人主体在水底作业过程中进行位移时无需通过推进器即可轻松实现位移,从而有效避免了推进器在运作时将水底淤泥搅浑导致水底视线变得模糊的现象,从而能够很好的观察作业,而且,位移的精度较高,操控简便,实用性强。
13、2.本发明通过推进器与浮力调节部的配合,当水下机器人主体在水底完成作业后需要上移时,首先,通过水下机器人主体上的推进器将水下机器人主体向上推进,然后再通过外部控制装置将驱动电机启动,使第一同步带轮、第二同步带轮带着螺母转动,然后驱动螺杆在螺纹作用下带着矩形板、三根滑动杆和三个活塞向后移动,从而将外部空气经抽气软管抽到三个抽气筒内部,从而使三个抽气筒的浮力得到大幅度提高,然后在浮力作用下,使得水下机器人主体在水中向上移动时,能够快速的向上移动,从而提高了水下机器人主体的上移效率。
14、3.本发明通过将三根抽气软管上端设置位于水面上方部位,从而使得抽气筒在进行抽气时,能够有效避免将水抽到抽气筒内部,从而大大提高了浮力调节部在使用时的可靠性。
15、4.本发明通过浮力调节部的设置,能够根据需要调节浮力,调节时,通过外部控制装置控制驱动电机的转轴正反转,使第一同步带轮、第二同步带轮带着螺母正反转动,然后驱动螺杆在螺纹作用下带着矩形板、三根滑动杆和三个活塞向后移动,从而使得抽气筒的浮力得到调节,从而使得水下机器人主体在水中运作时更加平稳可靠。
技术特征:
1.一种用于水下目标打捞的液压支撑结构,包括液压支撑部(1);其特征在于:所述液压支撑部(1)内侧顶部设有左右移动机构(2),且左右移动机构(2)底部安装有浮力调节部(3);所述浮力调节部(3)底部安装有水下机器人主体(4);所述液压支撑部(1)包括匚字形支撑板(101)、滑动支撑块(102)和液压缸(103),所述匚字形支撑板(101)左右两端面均设有两个t型滑条,且匚字形支撑板(101)左右两端面均通过t型滑条滑动连接有一个滑动支撑块(102),且每个滑动支撑块(102)下端均固定安装有两根支腿,所述液压缸(103)的数量为两个,且两个液压缸(103)分别安装在匚字形支撑板(101)顶端面左右两侧,两个液压缸(103)的伸缩杆下端分别与两个滑动支撑块(102)固定连接。
2.如权利要求1所述一种用于水下目标打捞的液压支撑结构,其特征在于:所述左右移动机构(2)包括移动块(201)、螺纹筒(202)、调节电机(203)和调节螺杆(204),所述移动块(201)滑动连接在匚字形支撑板(101)内部顶端面,且移动块(201)上端面固定连接有螺纹筒(202);所述调节电机(203)安装在匚字形支撑板(101)上端面,且调节电机(203)的转轴固定连接有调节螺杆(204),并且调节螺杆(204)与螺纹筒(202)螺纹连接。
3.如权利要求2所述一种用于水下目标打捞的液压支撑结构,其特征在于:所述浮力调节部(3)包括矩形壳体(301)、抽气筒(302)、抽气软管(303)、导向滑筒(304)、滑动杆(305)和活塞(3012),所述矩形壳体(301)固定连接在移动块(201)底端面,且矩形壳体(301)内部呈均匀状安装有三个抽气筒(302),每个抽气筒(302)前端均连接有一根抽气软管(303),且每个抽气筒(302)内部后端均固定安装有一个导向滑筒(304);每个所述导向滑筒(304)内部滑动连接有一根滑动杆(305),且每根滑动杆(305)前端均设有一个活塞(3012),活塞(3012)与抽气筒(302)内壁紧密接触,三根滑动杆(305)后端固定连接有矩形板。
4.如权利要求3所述一种用于水下目标打捞的液压支撑结构,其特征在于:所述浮力调节部(3)还包括驱动电机(306)、驱动螺杆(307)、固定支板(308)、螺母(309)、第一同步带轮(3010)和第二同步带轮(3011),所述驱动电机(306)安装在矩形壳体(301)左端面后侧,且驱动电机(306)的转轴固定连接有第一同步带轮(3010);所述滑动杆(305)后端的矩形板前端面左侧固定连接有驱动螺杆(307),且驱动螺杆(307)贯穿固定支板(308);所述固定支板(308)固定安装在矩形壳体(301)左端面,且固定支板(308)后端面转动连接有螺母(309),并且螺母(309)与驱动螺杆(307)螺纹连接,螺母(309)外部固定连接有第二同步带轮(3011),且第二同步带轮(3011)与第一同步带轮(3010)通过同步带传动连接。
5.如权利要求4所述一种用于水下目标打捞的液压支撑结构,其特征在于:所述水下机器人主体(4)底部安装有匚字形支板(401),且匚字形支板(401)内侧下端安装有夹持装置(402);所述水下机器人主体(4)连接有水下电缆(403),且水下电缆(403)固定连接在矩形壳体(301)外部。
6.如权利要求5所述一种用于水下目标打捞的液压支撑结构,其特征在于:所述驱动电机(306)、调节电机(203)外部均设有密封防水罩,且驱动电机(306)、调节电机(203)均通过水下电缆(403)与外部控制装置电性连接。
7.如权利要求5所述一种用于水下目标打捞的液压支撑结构,其特征在于:所述夹持装置(402)为可伸缩的机械手,水下电缆(403)和三根抽气软管(303)外部套接有绑紧带。
8.如权利要求3所述一种用于水下目标打捞的液压支撑结构,其特征在于:当所述水下机器人主体(4)位于水下时,三根抽气软管(303)上端均位于水面上方部位。
9.如权利要求1所述一种用于水下目标打捞的液压支撑结构,其特征在于:所述匚字形支撑板(101)顶端面前侧开设有矩形通口,且矩形通口位于水下机器人主体(4)上的前侧推进器正上方。
10.如权利要求3所述一种用于水下目标打捞的液压支撑结构,其特征在于:当所述滑动杆(305)带着活塞(3012)向后移动时,外部空气经抽气软管(303)进入到抽气筒(302)内部。
技术总结
本发明提供一种用于水下目标打捞的液压支撑结构,涉及水下打捞设备领域,包括液压支撑部;所述液压支撑部内侧顶部设有左右移动机构,且左右移动机构底部安装有浮力调节部;所述浮力调节部底部安装有水下机器人主体,本发明通过液压支撑部与左右移动机构的配合,从而使得水下机器人主体无需通过推进器即可轻松实现位移,避免了推进器在运作时将水底淤泥搅浑导致水底视线变得模糊的现象,再者通过浮力调节部的设置,提高了水下机器人主体的上移效率。解决传统水下机器人上的支撑结构在水下作业时,仍需采用推进器,从而造成水底淤泥浑浊,无法很好的观察作业,再者水下机器人在水中带着支撑结构上移时效率较低的问题。
技术研发人员:马鑫宇,张里斌,李谦,杜凯
受保护的技术使用者:临沂星泽海洋科技有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!