一种水下测量无人船
本发明涉及无人船,尤其涉及一种水下测量无人船。
背景技术:
1、如今,越来越多的水下探测任务是通过无人船来完成的,无人船包括船身主体和安装于船身主体的检测装置。检测时,将无人船停放于被检水域的水面上,随后通过检测装置对水域内的同一区域进行多次检测,从而得到检测结果。
2、当需要在水中停止行动来进行测量任务时,由于水中的水流较大,当没有向前行驶的动力时,就会导致测量船发生侧翻的后果,从而影响整个的测量工作的进度和效果;
3、而且现有的探测器大多固定在船身上,无法进行水体内部环境观察,只能通过特定的潜水机器人或人工潜水进行探测,这无疑增加了水体测量的难度和任务强度,为此我们提出一种水下测量无人船,能够实现多角度位置水下测量观察。
技术实现思路
1、本发明提出的一种水下测量无人船,解决了现有的无人船探测稳定性差,探测器不能实现独立水下运动,探测局限性大的问题。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种水下测量无人船,包括船主体和两个侧片体,所述船主体的顶端安装有船体稳定装置,船主体尾端活动安装有弧形固定板,弧形固定板的顶端两侧均设有卡口,船主体的两侧均嵌入有与卡口配合的锁紧机构,船主体的内部通过安装架固定有电动机三,电动机三的输出轴连接有缠绕辊,缠绕辊上卷绕有一端固接有探测器的连接绳,且探测器安装在弧形固定板的中间位置,弧形固定板的两侧均通过固定件安装有电动机二,电动机二的输出轴连接有侧片体,船主体的底端两侧均安装有辅助环,侧片体的一端插接在辅助环内,对侧片体进行辅助固定,且侧片体的底端安装有推进器。
4、优选的,所述船体稳定装置包括安装在船主体顶端中间位置的固定框架,固定框架的底端外部安装有固定环,固定框架的外部滑动套接有活动环,活动环的外侧壁上铰接有多个支撑杆,支撑杆和固定环之间铰接有对应数量的连接杆,支撑杆的外端底部共同固定有环形充气气囊,所述船主体的内部安装有电动机一,电动机一的输出轴连接有转动连接在固定框架内部的丝杆,丝杆与活动环内壁上凸出部螺旋传动连接。
5、优选的,所述环形充气气囊在展开后环绕在船主体的外部,且环形充气气囊在充气后,其底端漂浮在水面上,在遇到风浪时,为船体提供稳定稳定支撑,同时在进行水下测量时,同样保持了船主体的稳定性。
6、优选的,所述探测器包括筒体,筒体的顶端安装有电源接头,筒体的内部安装有控制器、蓄电池二、检测模块和电动机四,筒体的底端安装有半圆形的透明保护罩,电动机四的底端输出轴连接有位于透明保护罩内部的摄像模组,控制器与蓄电池二、检测模块、电动机四以及摄像模组电性连接。
7、值得说明的是,所述弧形固定板的顶端两侧均设有弧形部,卡接块与弧形部滑动连接。
8、优选的,所述锁紧机构包括嵌入在船主体上的盒体,盒体的内部安装有水平设置的限位杆,限位杆的两端均滑动套接有卡接块,卡接块与盒体的一侧壁之间安装有弹簧,两个卡接块之间设有安装在盒体内的双头伸缩杆,卡接块的延伸部活动卡接在弧形固定板上的卡口内。
9、优选的,所述侧片体包括位于两端的导水端头,两个导水端头之间密封连接有柱形的膨胀气囊,两个导水端头之间安装有三级伸缩杆,推进器安装在其中一个导水端头的底端。
10、进一步的,所述船主体的底端开有凹槽,探测器的一端插接在凹槽内,船主体底端凹槽内安装有与电源接头配合的防水插座,且凹槽的竖截面为等腰梯形,船主体的内部同样设有蓄电池一,在探测器与船主体连接时,蓄电池一能够为蓄电池二充电。
11、优选的,所述船体稳定装置上的多个支撑杆端口均安装有水体取样器;
12、水体取样器包括安装在支撑杆一端的取样筒,取样筒的顶端安装有单头伸缩杆,单头伸缩杆的输出轴连接有滑动密封连接在取样筒内部的活塞块,取样筒的底端连接有带有单向阀的取样管以及放水阀。
13、值得说明的是,所述船主体以及探测器的内部均安装有充气泵,两个充气泵分别通过导气管连接有环形充气气囊、膨胀气囊。
14、与现有技术相比,本发明的有益效果是:
15、1、本发明提出了一种水下测量无人船,能够实现船体单体船以及三体船状态的切换,实现船体在不同环境下的行进需要;
16、船体上的动力部分推进器能够实现与船主体的分离,并与探测器结合后为探测器提供动力,从而带动探测器在水下进行多方位多角度探测,满足多种测量需求。
17、2、本发明提出了一种水下测量无人船,通过船体稳定装置的设置,能够在风浪较大时展开,防止船体发生侧翻的后果;
18、同时在推进器脱离船体辅助探测器进行探测时,进一步保持船主体的稳定性,为船体提供更好的稳定性和浮力,为探测器的运动回收提供支撑。
技术特征:
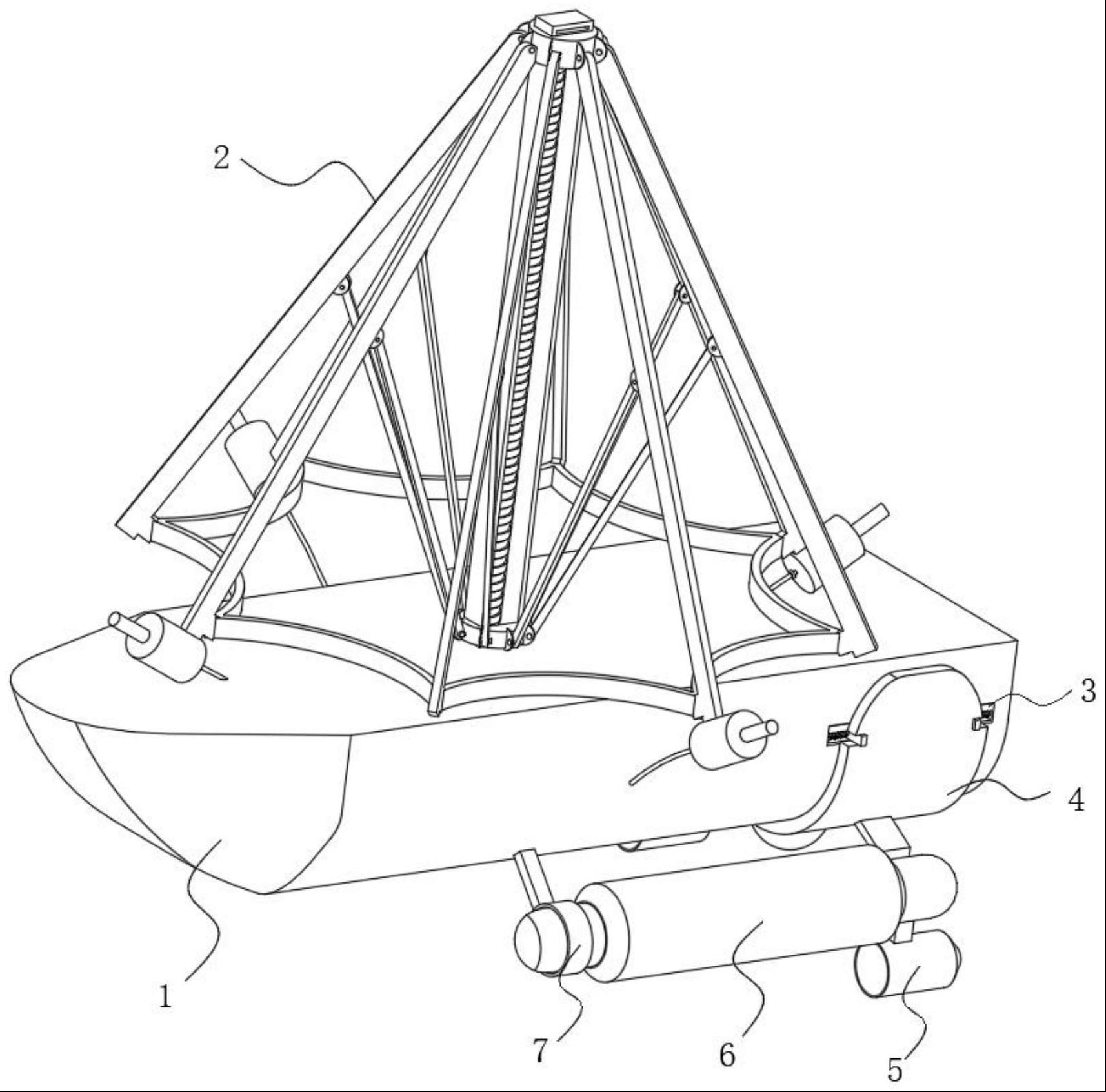
1.一种水下测量无人船,包括船主体(1)和两个侧片体(6),其特征在于,所述船主体(1)的顶端安装有船体稳定装置(2),船主体(1)尾端活动安装有弧形固定板(4),弧形固定板(4)的顶端两侧均设有卡口(401),船主体(1)的两侧均嵌入有与卡口(401)配合的锁紧机构(3),船主体(1)的内部通过安装架(10)固定有电动机三(11),电动机三(11)的输出轴连接有缠绕辊(12),缠绕辊(12)上卷绕有一端固接有探测器(14)的连接绳(13),且探测器(14)安装在弧形固定板(4)的中间位置,弧形固定板(4)的两侧均通过固定件(8)安装有电动机二(9),电动机二(9)的输出轴连接有侧片体(6),船主体(1)的底端两侧均安装有辅助环(7),侧片体(6)的一端插接在辅助环(7)内,且侧片体(6)的底端安装有推进器(5)。
2.根据权利要求1所述的一种水下测量无人船,其特征在于,所述船体稳定装置(2)包括安装在船主体(1)顶端中间位置的固定框架(206),固定框架(206)的底端外部安装有固定环(204),固定框架(206)的外部滑动套接有活动环(205),活动环(205)的外侧壁上铰接有多个支撑杆(208),支撑杆(208)和固定环(204)之间铰接有对应数量的连接杆(203),支撑杆(208)的外端底部共同固定有环形充气气囊(209),所述船主体(1)的内部安装有电动机一(201),电动机一(201)的输出轴连接有转动连接在固定框架(206)内部的丝杆(207),丝杆(207)与活动环(205)内壁上凸出部螺旋传动连接。
3.根据权利要求2所述的一种水下测量无人船,其特征在于,所述环形充气气囊(209)在展开后环绕在船主体(1)的外部,且环形充气气囊(209)在充气后,其底端漂浮在水面上。
4.根据权利要求1所述的一种水下测量无人船,其特征在于,所述探测器(14)包括筒体(1404),筒体(1404)的顶端安装有电源接头(1401),筒体(1404)的内部安装有控制器、蓄电池二(1402)、检测模块(1403)和电动机四(1405),筒体(1404)的底端安装有半圆形的透明保护罩(1406),电动机四(1405)的底端输出轴连接有位于透明保护罩(1406)内部的摄像模组(1407)。
5.根据权利要求1所述的一种水下测量无人船,其特征在于,所述弧形固定板(4)的顶端两侧均设有弧形部(402),卡接块(304)与弧形部(402)滑动连接。
6.根据权利要求5所述的一种水下测量无人船,其特征在于,所述锁紧机构(3)包括嵌入在船主体(1)上的盒体(301),盒体(301)的内部安装有水平设置的限位杆(303),限位杆(303)的两端均滑动套接有卡接块(304),卡接块(304)与盒体(301)的一侧壁之间安装有弹簧(305),两个卡接块(304)之间设有安装在盒体(301)内的双头伸缩杆(302),卡接块(304)的延伸部活动卡接在弧形固定板(4)上的卡口(401)内。
7.根据权利要求1所述的一种水下测量无人船,其特征在于,所述侧片体(6)包括位于两端的导水端头(603),两个导水端头(603)之间密封连接有柱形的膨胀气囊(601),两个导水端头(603)之间安装有三级伸缩杆(602),推进器(5)安装在其中一个导水端头(603)的底端。
8.根据权利要求4所述的一种水下测量无人船,其特征在于,所述船主体(1)的底端开有凹槽,探测器(14)的一端插接在凹槽内,船主体(1)底端凹槽内安装有与电源接头(1401)配合的防水插座,且凹槽的竖截面为等腰梯形。
9.根据权利要求1所述的一种水下测量无人船,其特征在于,所述船体稳定装置(2)上的多个支撑杆(208)端口均安装有水体取样器(202);
10.根据权利要求1所述的一种水下测量无人船,其特征在于,所述船主体(1)以及探测器(14)的内部均安装有充气泵,两个充气泵分别通过导气管连接有环形充气气囊(209)、膨胀气囊(601)。
技术总结
本发明属于无人船领域,尤其是一种水下测量无人船,针对现有的无人船探测稳定性差,探测器不能实现独立水下运动,探测局限性大的问题,现提出如下方案,其包括船主体和两个侧片体,所述船主体的顶端安装有船体稳定装置,船主体尾端活动安装有弧形固定板,弧形固定板的顶端两侧均设有卡口,船主体的两侧均嵌入有与卡口配合的锁紧机构,船主体的内部通过安装架固定有电动机三,电动机三的输出轴连接有缠绕辊。本装置能够实现船体单体船以及三体船状态的切换,实现船体在不同环境下的行进需要;船体上的推进器能够实现与船主体的分离,并与探测器结合后为探测器提供动力,从而带动探测器在水下进行多方位多角度探测,满足多种测量需求。
技术研发人员:巩庆涛,滕瑶,胡鑫,李康强,孙忠玉,韩彦青,神克常,何士龙
受保护的技术使用者:鲁东大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!