一种水下运载器的制作方法
本发明涉及运载设备,特别是涉及一种水下运载器。
背景技术:
1、水下运载器最初主要用在军事用途上,主要用来从水下隐秘输送蛙人及其伴随装备至目的地执行秘密任务,是一种水中的特战装备,随着技术的发展,水下运载器的使用也逐步扩展到民用和潜水娱乐领域,民用主要在水下检修,勘测,打捞救援等领域使用蛙人运载器。潜水娱乐方面主要用单人的小型蛙人运载器(水下助推器)作短途低速的水中体验活动。
2、在军事领域中,为了能够运输1至2名蛙人及其伴随装备,一般都将运载器的长度设计为超过两米,但在存储和运输过程中,往往需要在有限的空间内存储更多的运载器或装备,需要将运载器所占用的空间缩小。现有技术中,如专利号为“cn107628210a”名称为“一种潜水员操控骑行的水下运载器”该水下运载器也是设置有两个可以伸缩滑动的舱体,以减少运载器的占用空间,但是该运载器在对舱体的限位是通过设置前排插销和后排插销来调整两个舱体的位置情况,无法根据需要灵活调整两个舱体的相对位置。
技术实现思路
1、本发明的目的是:提供一种能灵活调整两个舱体相对位置情况的水下运载器。
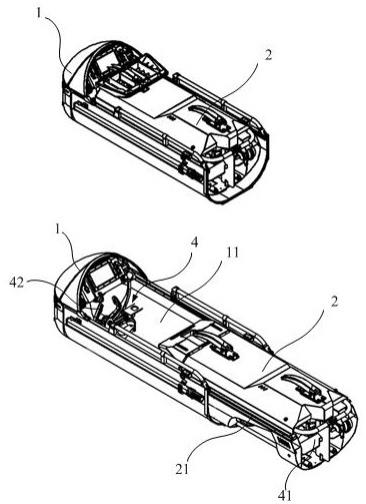
2、为了实现上述目的,本发明提供了一种水下运载器,包括第一舱体和第二舱体,还包括:
3、驱动机构,所述驱动机构固定安装在所述第二舱体中;
4、操舵系统,所述操舵系统具有用于改变所述驱动机构喷流方向的舵叶和用于控制所述舵叶转动的控制机构;所述舵叶位于所述驱动机构的后端;
5、所述第一舱体具有容置腔,所述第二舱体与所述容置腔滑动连接;所述第一舱体上设有限位机构;所述第二舱体与所述容置腔的滑动连接处通过所述限位机构夹紧限位。
6、其中,限位机构与第一舱体固定连接,且限位结构的数量为两个,两个限位机构位于容置腔的相对两侧。能很好的限制第二舱体的移动。
7、本发明实施例一种水下运载器与现有技术相比,其有益效果在于:通过设置驱动机构为运载器提供动力,操舵系统的控制机构控制舵叶的转动进而改变驱动机构的喷流方向,最终改变了推进方向。第一舱体和第二舱体滑动连接,通过在该滑动连接处设置限位机构来夹紧限位第一舱体和第二舱体的相对移动,相比于通过插销限位的方式能灵活的根据需求将第二舱体相对容置腔伸缩移动相应的长度后,通过限位机构在滑动连接处进行夹紧限位,提高了水下运载器在使用中的适应能力。
8、进一步的,所述第二舱体上设有滑轨,所述容置腔的内壁上设有滑槽,所述滑轨卡入所述滑槽内且与所述滑槽滑动连接;所述限位机构将所述滑轨和所述滑槽夹紧抵接在一起。设置相互配合的滑槽和滑轨能便于第二舱体在容置腔中沿滑槽的延伸方向滑动;通过将限位机构将滑槽和滑轨夹紧抵接,增加滑轨和滑槽的之间的摩擦力,进而限制了第二舱体和容置腔的相对移动。该结构简单,便于实现滑动和限位。
9、具体的,滑轨和滑槽的数量分别为两个,两个滑槽分别位于容置腔相对两个侧壁上,两个限位机构分别夹紧在两个所述滑轨上。该设置能合理分布了夹紧限位的摩擦力分布,能更好的保证限位情况。
10、进一步的,所述滑槽和所述滑轨的横截面均呈c型结构,且所述滑槽和所述滑轨相互扣合连接。采用c型结构的滑槽和滑轨相互扣合连接,该设计合理,连接牢固,不容易发生脱轨现象。
11、具体的,滑槽采聚四氟乙烯材料制成,聚四氟乙烯材料具有高润滑的性能,而滑轨采用铝合金材料制成。保证了铝合金材料能在聚四氟乙烯材料制成的滑槽中更加顺畅滑动。减少伸缩第二舱体时所需的外力。
12、进一步的,所述限位机构包括夹紧件和螺栓;所述螺栓与所述第一舱体转动连接;所述夹紧件与所述螺栓螺纹配合,且所述夹紧件可相对所述第一舱体移动,并可将所述滑轨夹紧抵接在所述滑槽上。通过螺栓的转动进而带动了夹紧件沿螺栓的延伸方向移动,移动的夹紧件抵接在滑轨上,使得滑轨抵接在滑槽内,增加了滑轨与滑槽之间的摩擦力,实现夹紧限位功能。结构简单,操作灵活方便。
13、具体的,螺栓通过卡簧限制螺栓与第一舱体的相对移动,即第一舱体上开设有装配孔,螺栓插设于装配孔中,螺栓上开设有卡簧且螺栓可相对卡簧相对转动,卡簧卡入装配孔内的卡槽中;
14、或者螺栓上具有凸环,螺栓深入装配孔内以后,凸环卡入卡槽中,使得螺栓无法滑出装配孔,但螺栓可相对装配孔发生转动。
15、进一步的,所述限位机构还包括安装座,且所述安装座与所述第一舱体固定连接;所述螺栓与所述安装座转动连接。设置安装座能便于将螺栓插入安装座内,便于实现螺栓与安装座的转动连接。
16、进一步的,控制机构包括手柄、转动件、处理器、舵机;所述手柄通过所述转动件与所述第一舱体铰接;所述第一舱体上还安装有用于获取所述转动件的转动角度的信号采集器;所述信号采集器与所述处理器电性连接,所述处理器与所述舵机电性连接,且所述舵机的输出端与所述舵叶传动连接。手柄的转动能带动转动件的相应转动,信号采集器收集转动件的转到角度,并输入到处理器内,通过处理器的处理后,处理器向舵机输出相应的信号,舵机转动相应角度,最终使得舵叶发生一定的转动,最终改变了驱动机构的喷流方向,改变推进方向。
17、进一步的,所述转动件包括连接座、第一转轴、第二转轴;所述手柄与所述第一转轴固定连接,且所述第一转轴与所述连接座转动连接;所述第二转轴与所述连接座固定连接,且所述第二转轴与所述第一舱体转动连接;所述第一转轴和所述第二转轴上均设有所述信号采集器。第一转轴和第二转轴的转动角度被对应的信号采集器获取后,输入到处理器中,处理器处理后输出相应的信号给舵机,舵机转动后改变舵叶的角度,实现运载器向不同方向的转向。
18、具体的,第一转轴和第二转轴相互垂直设置,第一转轴的轴向与运载器的前进方向平行;第二转轴的轴向与运载器的前进方向垂直;第一转轴转动时,对应的信号采集器获取相应的角度信息(左转或者右转的角度信号),第二转轴转动时,对应的信号采集器获取相应的角度信息(上转或者下转的角度信号)。舵机和舵叶的数量分别为一一对应的两个,其中两个舵叶相互垂直设置,一个舵叶用于控制运载器的左转或者右转,另一个舵叶用于控制运载器的上转或者下转。
19、具体的,信号采集器为角度编码器,采用角度编码器能便捷的获取转轴的转动角度。
20、进一步的,还包括导航系统,所述导航系统包括定位器、罗经、控制器、显示屏;所述显示屏的一端;所述定位器和所述罗经均与所述控制器电性连接,且所述控制器与所述显示屏电性连接;所述定位器、所述罗经、所述控制器、所述显示屏均固定设置在所述第一舱体上。采用导航系统能为运载器提供导航功能,为使用者在水下和水上提供精确的导航方向,且导航系统能计算出实时的航行速度,供使用者参考。当运载器在水面上航行时,可以依靠定位器提供的实时位置信息,控制器计算后得出导航的方向。当运载器在水下航行时,定位器信号差,此时通过罗经进行航向指示,在偏航时给出提示。等到运载器到达水面后再通过定位器进行校正。保证在水下也能按照准确的方向进行航行。
21、具体的,定位器为gps定位器,该定位器还连接有用于增加信号的天线,该天线与第一舱体的外部固定连接;罗经为电子罗盘,用于提供方向信息。
22、进一步的,所述驱动机构包括电池、驱动电机、螺旋桨;所述电池和所述驱动电机均与所述控制器电性连接;所述螺旋桨与所述驱动电机的输出端传动连接,所述电池与所述驱动电机电连接。通过驱动电机驱动螺旋桨转动,为运载器提供前进的动力。控制器能控制电池输入电机的电流,进而控制电机的输出功率,最终能影响电机的转速,和螺旋桨的转速。
23、进一步的,所述处理器与所述控制器电性连接。控制器将前进的速度信号传输至处理器,控制器根据速度信号调整转向角度,实现合理的转向速度。
24、具体的,处理器对输入的两个角度信号再根据控制器输入的当前速度信号和当前的电池电量,处理计算后输出舵叶的转动角度和转动速度,最终将相应信号输入到舵机中,以驱动舵叶的转动。
- 还没有人留言评论。精彩留言会获得点赞!