一种跨域式双体无人帆船
本发明属于无人帆船,具体地说,是一种跨域式双体无人帆船。
背景技术:
1、无人帆船是以风能为驱动的海洋机器人,属于无人艇的一种。随着海洋开发与海洋观测需求的日益旺盛,国内外对无人帆船的研究越来越多。国外对无人帆船的研究起步较早,从设计方法、运动控制与路径规划算法等方面都有大量的研究成果,并且已经有较成熟的产品应用于海洋观测与海洋军事等应用场景中。国内对无人帆船的研究起步较晚,浙江大学、上海交通大学、中国海洋大学、大连海事大学等学校对无人帆船进行了研究并取得了一系列成果。目前我国对无人帆船的研究还主要集中于理论研究及样机研制阶段,成熟的商用产品及应用案例较少。下面对国内外无人帆船的研究进行介绍:
2、美国harbor wing科技公司推出hwt x-1原型样机,该样机的翼帆可以360°旋转,风力推进模式和可折叠螺旋桨辅助推进相结合,前者模式航行速度低于4kn时,使用后者推进方式,续航能力可达4小时,2008年推出hwt x-3三体船,续航能力大于三个月。美国oceanaero公司研制的submarans10,采用风力推进和光伏发电辅助获取电能方式,是一款两栖海洋机器人,类似潜艇将海水吸入舱内,可下潜至水下200m。美国saildrone公司推出的无人帆船saildrone系列从2015年研究至今。可以通过太阳能进行发电,航速可达5kn,续航力12个月,在白令海执行了观测任务,为分析海冰融化对海面降温的影响提供了数据。挪威offshore sensing as自动驾驶帆船公司推出sb met号,完成了无人帆船首次横跨大西洋的目标,sb met号成功横跨大西洋是无人帆船发展史上的转折点。奥地利创新计算机科学学会研制的asv roboat,获得了第四届世界机器人帆船锦标赛冠军。
3、国内2018年8月,wrsc在浙江宁波举办,一定程度上证明了我国对无人帆船研宄的重视和在该领域日益提高的国际影响力。上海交通大学对无人船进行了多年研究,其在无人帆船领域的研究重点主要在帆船控制理论方面。中国科学院沈阳自动化研究所的科研团队对无人帆船在海洋观测时的航行机理、设计与优化等问题展开了研究,在2018年研发出了“海鸥”号,实现长时间海洋观测,2019年该帆船在其航向控制、位置保持、和路径跟踪等方面表现出了良好的控制能力,2022年实现速度预测程序快速收敛,同时在设计和优化上取得了新的进展。
4、无人帆船是一种可以自动航行的机器人,尽管人类可以进行远程控制,但大部分时间是自主航行。它们配备了传感器、摄像机和科学仪器,可以执行各种任务,如海洋勘测、环境监测和海洋科学研究。目前,无人帆船的技术包括自主导航、避障、通信和能源管理等方面的创新,对无人帆船结构上的创新较少。无人帆船依靠风能提供驱动力,绿色无污染,而固定翼飞机可实现大范围转移,如果将帆船与飞机进行融合设计,可充分发挥帆船长时间作业及飞机快速飞行的优势,极大提升无人平台的作业半径与响应速率,基于此,我们开展固定翼飞机与无人帆船的融合设计,进一步赋予帆船生命力,让其可以上天入海,跨域作业。
技术实现思路
1、本发明的目的在于提供一种跨域式双体无人帆船,是一种具备空中飞行、水面航行两种方式的无人帆船系统,融合机器视觉,依靠太阳能和风能提供持续动力,绿色无污染,可实现长时间、跨区域水面作业,并可进行自主规划路径巡航及自主避障,在水体数据采集、水面巡逻、海洋勘探等方面应用前景广阔。
2、为实现上述目的,本发明采用以下技术方案:
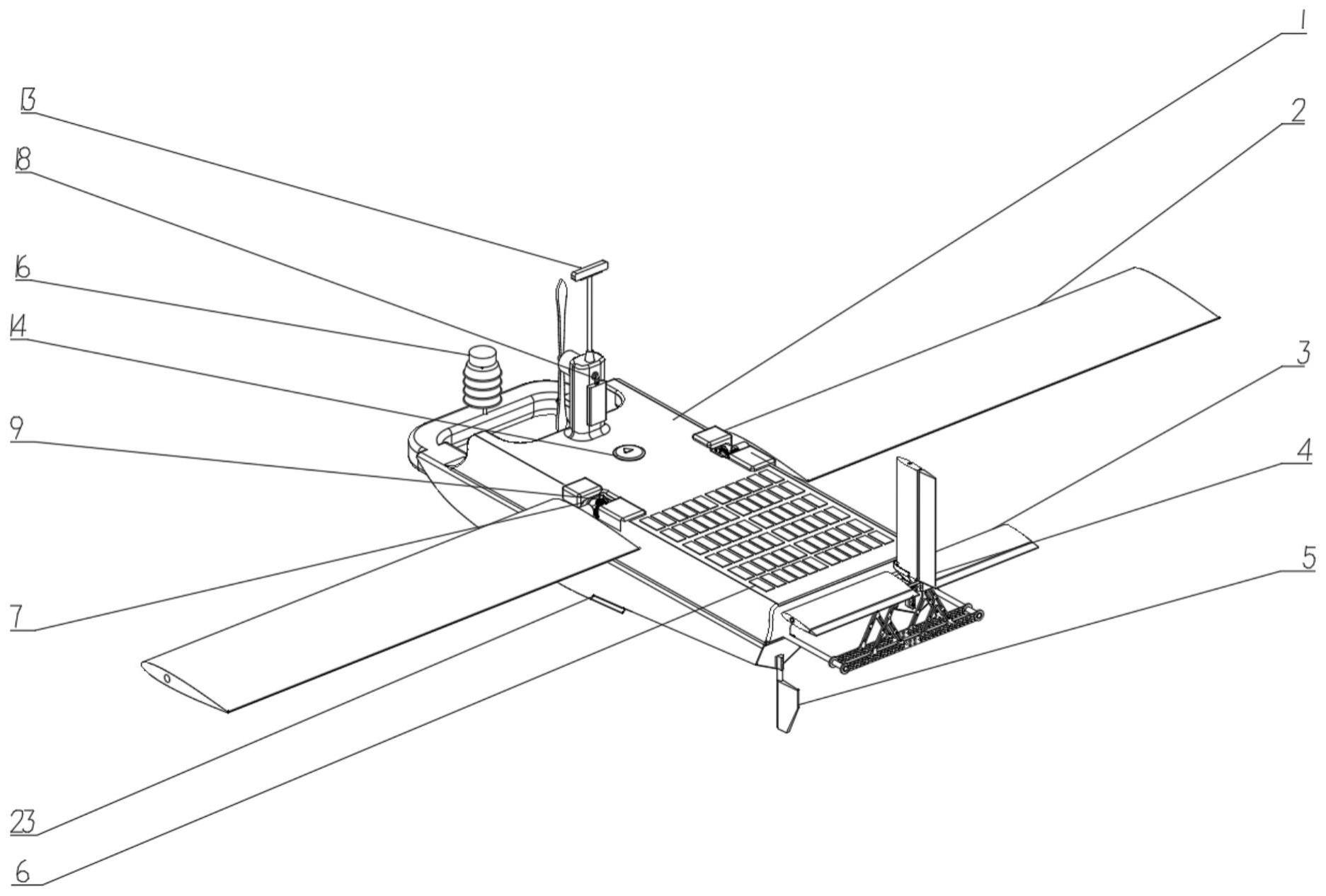
3、一种跨域式双体无人帆船,结构部分包括船体、风帆、转向舵,及覆盖柔性薄膜太阳能发电板的基本框架和由两个直流减速电机和二自由度翻转关节组成的旋转折叠装置;电路部分包括航行控制器,与该航行控制器连接的信号接收机、航模电池、gps传感器、imu姿态传感器、双目摄像头、风速风向传感器和信息综合处理计算机,所述信息综合处理计算机根据设定的使命及所述双目摄像头、gps传感器、imu姿态传感器和风速风向传感器的信息进行自主路径规划;
4、还包括动力装置,其设于基本框架上,为整个帆船提供足够飞行动力;
5、在航行模式下,无人帆船的两个风帆通过所述旋转折叠装置垂直于水面,通过旋转折叠装置改变其角度并结合转向舵的角度控制,实现风力驱动下的前进、转弯行为,位于无人帆船前端的双目摄像头(13)在航行过程中对周围海洋环境进行观测,结合自主路径规划算法,实现自主航行及避障;
6、在飞行模式下,所述风帆通过所述旋转折叠装置由竖直状态转换为水平状态,整体呈现固定翼飞机的形态。
7、进一步地,所述船体的材质是聚苯乙烯,为双船体结构。
8、进一步地,所述船体前端具有防止水面滑行时水花喷溅的抑波槽结构,底部1/2处具有减少水面粘黏阻力的断阶结构。
9、进一步地,所述风帆与旋转折叠装置(10)连接,是naca 0021对称翼型。
10、进一步地,所述基本框架,由多根碳纤维管和匹配的连接件组成,所述船体、风帆、gps传感器、imu姿态传感器、风速风向传感器及信息综合处理计算机均安装于所述基于框架之上。
11、进一步地,还包括平尾和垂尾,所述平尾与尾部增高件连接,垂尾与平尾连接,控制飞行时的俯仰和转向以及增加水面航行过程中的稳定性与灵活性;所述尾部增高件与基本框架尾部延长的碳纤维管连接,防止起飞时尾部浸入水中产生粘黏阻力;所述转向舵连接在船体尾部,为水面航行提供转向能力。
12、进一步地,所述柔性薄膜太阳能发电板覆盖在基本框架上,为所述航模电池充电,保证无人帆船的航行控制器和所有传感器供电的持续性。
13、进一步地,所述二自由度翻转关节,以两个直流减速电机为原动件,其中第一直流减速电机经由蜗轮、蜗杆减速带动旋转体转动,实现风帆翻折;第二直流减速电机通过联轴器与旋转体中的锥齿轮相连,在旋转体中啮合的锥齿轮实时改变转矩的传递方向,实现风帆旋转。
14、进一步地,所述航模电池、所述航行、所述信号接收机和所述imu姿态传感器均设于密封舱内部,该密封舱固定于所述基本框架前端的平台上,所述航模电池用于无人帆船飞行模式下供电,所述航行控制器用于控制无人帆船的飞行;所述信号接收机接收遥控信号并把信号发送给航行控制器,以实现对无人帆船的远程遥控;所述imu姿态传感器位于密封舱内部,用于采集无人帆船的航向角、横摇角、俯仰角及其对应角速度;所述双目摄像头镶嵌于船体头部,用于进行环境信息采集及目标检测与跟踪;所述gps传感器位于船体前部,用于确定无人帆船的经纬度和航速;所述风速风向传感器安装在船体前部,用于采集相对风向角和相对风速。
15、进一步地,所述动力装置包括防水电调、u3515推进电机和13寸固定翼螺旋桨,所述u3515推进电机通过电机支架与所述基本框架固定,所述13寸固定翼螺旋桨固定在所述u3515推进电机前面,所述防水电调与该u3515推进电机连接,为其提供信号,整个动力装置可提供4kg的拉力,为飞行提供充足动力。
16、有益效果
17、本发明的一种跨域式双体无人帆船,是一种具备飞行、航行两种方式的无人帆船系统,融合机器视觉,可实现长时间远距离作业,自主规划路径巡航,及时躲避障碍物,依靠太阳能和风能提供动力,绿色无污染,在水体数据采集、水面巡逻、海洋勘探等方面应用前景广阔。
- 还没有人留言评论。精彩留言会获得点赞!