一种隧道洞口用气囊封堵车的制作方法
本发明涉及一种气囊封堵车,具体涉及一种隧道洞口用气囊封堵车。
背景技术:
1、随着我国水电站系统的发展建造,伴随着水电站建造的泄洪洞自水电站运行起,常未经大流量泄洪的检验,且右岸泄洪洞存在不同程度的泄洪冲损现象,要求开展右岸泄洪洞泄洪安全性相关研究并提出处理措施。若右岸泄洪洞缺损不进行处理,再继续泄洪洞使用的情况下,内部缺陷可能会继续发展,影响到泄洪安全,因此,必须对泄洪洞进行修复。为了给泄洪洞修复提供干式施工条件,研究科学合理的放空洞封堵方案是十分必要的。
2、近年来,不正常的洪涝灾害在我国出现的频率愈加增高,发生洪涝的地点和时间常存在不确定性,从而导致水电站泄洪洞泄洪任务更加多变,以往固定式封堵装置在使用地点方面存在巨大的局限性。根据此问题,本专利提出一种隧道洞口用气囊封堵车,rov水下机器人带有水下定位系统和深水超高清摄像系统等,可自行定位并携带气囊封堵装置前往任意位置开展封堵作业工作。
技术实现思路
1、本公开的主要目的在于:针对气囊封堵装置位置限制问题,提出一种灵活机动能力强,能快速响应的可自行推进式隧道洞口用气囊封堵车,可前往任意位置开展封堵作业工作。
2、为达成上述目的,本发明采用的技术方案如下:
3、一种隧道洞口用气囊封堵车,包括气囊结构和rov水下机器人,所述气囊结构由钢制内核结构、气囊垫块、外圈气囊、左端环板以及右端封头组成,所述外圈气囊套装在钢制内核结构外沿,各外圈气囊之间安装有气囊垫块,用于固定、支撑外圈气囊,所述左端环板固定在钢制内核结构的左侧,所述右端封头固定在钢制内核结构的右侧,所述rov水下机器人与气囊结构连接,并牵引气囊在水下运动。
4、优选的,所述气囊结构由rov水下机器人实现多方向运动,所述rov水下机器人安装有加压装置和电磁阀,所述加压装置连接有与气囊接通的充管路,所述钢制内核结构内装有设备分流器,用于对各个气囊进行注气或水。
5、优选的,所述电磁阀打开后,通过外部的加压装置经充管路往气囊内注气或水,实现气囊的交错式加压,通过气囊包裹钢制内核结构形成封堵状态。
6、优选的,所述rov水下机器人上连接有收缩升降架,且收缩升降架的另一端连接气囊结构,用于将气囊放置于洞口内,所述外圈气囊充气后实现封堵。
7、优选的,所述左端挡环用橡胶圈包裹密封,避免对外圈气囊造成损坏。
8、优选的,所述rov水下机器人前端的水下定位系统和深水超高清摄像系统,在一定距离内自主寻找给定泄洪洞位置,根据洞口位置机器人携带零浮力状态下的气囊封堵装置自行推进至洞口。
9、鉴于此,与现有技术相比,本发明的有益效果是:
10、(一)、本申请中,针对气囊封堵装置位置限制问题,提出一种灵活机动能力强,能快速响应的可自行推进式隧道洞口用气囊封堵车,可前往任意位置开展封堵作业工作。
11、(二)、本申请中,气囊封堵车入水后,rov水下机器人前端的水下定位系统和深水超高清摄像系统在一定距离内自主寻找给定泄洪洞位置,根据洞口位置机器人携带零浮力状态下的气囊封堵装置自行推进至洞口,收缩升降架将气囊放置于洞口内,气囊充气后实现封堵,封堵完成后气囊排气或水,待气体或液体完全排出后,将气囊封堵装置收回完成撤离,安全可靠。
技术特征:
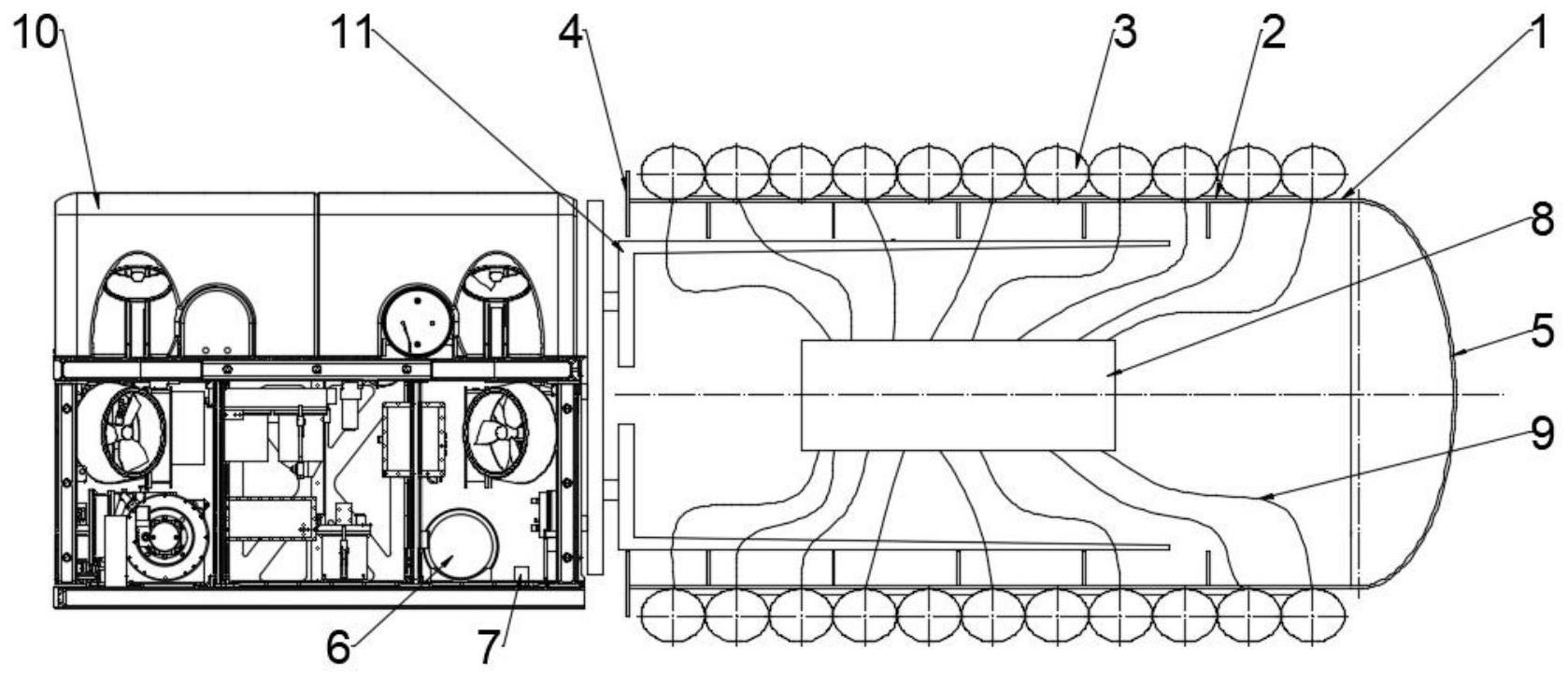
1.一种隧道洞口用气囊封堵车,其特征在于:包括气囊结构和rov水下机器人(10),所述气囊结构由钢制内核结构(1)、气囊垫块(2)、外圈气囊(3)、左端环板(4)以及右端封头(5)组成,所述外圈气囊(3)套装在钢制内核结构(1)外沿,各外圈气囊(3)之间安装有气囊垫块(2),用于固定、支撑外圈气囊(3),所述左端环板(4)固定在钢制内核结构(1)的左侧,所述右端封头(5)固定在钢制内核结构(1)的右侧,所述rov水下机器人(10)与气囊结构连接,并牵引气囊在水下运动。
2.根据权利要求1所述的一种隧道洞口用气囊封堵车,其特征在于:所述气囊结构由rov水下机器人(10)实现多方向运动,所述rov水下机器人(10)安装有加压装置(6)和电磁阀(7),所述加压装置(6)连接有与气囊接通的充管路(9),所述钢制内核结构(1)内装有设备分流器(8),用于对各个气囊进行注气或水。
3.根据权利要求2所述的一种隧道洞口用气囊封堵车,其特征在于:所述电磁阀(7)打开后,通过外部的加压装置(6)经充管路(9)往气囊内注气或水,实现气囊的交错式加压,通过气囊包裹钢制内核结构(1)形成封堵状态。
4.根据权利要求1所述的一种隧道洞口用气囊封堵车,其特征在于:所述rov水下机器人(10)上连接有收缩升降架(11),且收缩升降架(11)的另一端连接气囊结构,用于将气囊放置于洞口内,所述外圈气囊(3)充气后实现封堵。
5.根据权利要求1所述的一种隧道洞口用气囊封堵车,其特征在于:所述左端挡环(4)用橡胶圈包裹密封,避免对外圈气囊(3)造成损坏。
6.根据权利要求4所述的一种隧道洞口用气囊封堵车,其特征在于:所述rov水下机器人(10)前端的水下定位系统和深水超高清摄像系统,在一定距离内自主寻找给定泄洪洞位置,根据洞口位置机器人携带零浮力状态下的气囊封堵装置自行推进至洞口。
技术总结
本申请属于水电站水下封堵技术领域,尤其是涉及一种隧道洞口用气囊封堵车,包括气囊结构和ROV水下机器人,所述气囊结构由钢制内核结构、气囊垫块、外圈气囊、左端环板以及右端封头组成,所述外圈气囊套装在钢制内核结构外沿,各外圈气囊之间安装有气囊垫块,用于固定、支撑外圈气囊,所述左端环板固定在钢制内核结构的左侧,所述右端封头固定在钢制内核结构的右侧,所述ROV水下机器人与气囊结构连接,并牵引气囊在水下运动。本发明中,针对气囊封堵装置位置限制问题,提出一种灵活机动能力强,能快速响应的可自行推进式隧道洞口用气囊封堵车,可前往任意位置开展封堵作业工作。
技术研发人员:李小冬,魏屹坤,曹学兴,程品,陈豪,余记远,谭彬,聂兵兵,赵欢
受保护的技术使用者:上海交大海洋水下工程科学研究院有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!