深海多点位坐底观测AUV系统
本发明属于深海探测,特别涉及一种深海多点位坐底观测auv系统。
背景技术:
1、海洋是人类社会赖以生存和发展的重要基础空间,蕴藏着丰富的资源,包括生物资源、海洋矿物资源和海洋能源,拥有巨大的探索价值。自主水下机器人(auv)能够在水下自主执行任务,广泛应用于海洋环境观测、海底测绘、资源勘探、和生物探测等领域,但它们仍然依赖于辅助船的干预来完成单个航次任务,每个航次任务针对某一深海区域开展探测。深海相关科学研究(生态系统分析等)要求对深海长期进行多区域、多方位监测,深海探测正从单航次探测向深海长期多点位探测发展,当前auv探测模式难以满足上述需求,需要研究具备深海海底多点位观测功能的auv,并能够将探测数据传输至陆地,供科研工作人员进行海底生态、环境与资源分析。
技术实现思路
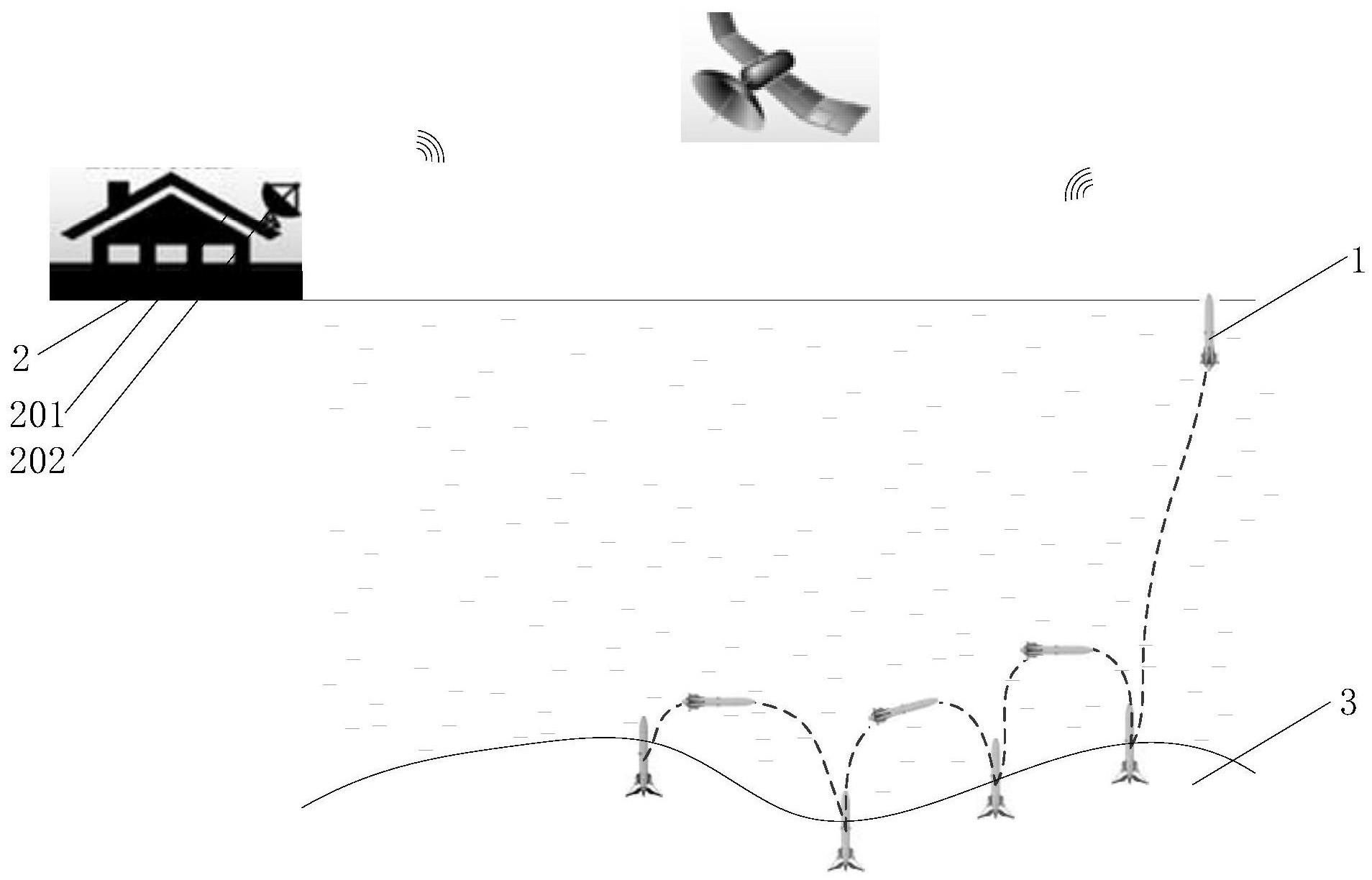
1、针对上述问题,本发明的目的在于提供一种深海多点位坐底观测auv系统,能够根据任务需求在深海海底进行多点位坐底长期观测,在观测后能够浮出水面将数据传输至陆地接收站,再次下潜至海底进行多点位观测。
2、为了实现上述目的,本发明采用以下技术方案:
3、本发明提供一种深海多点位坐底观测auv系统,包括:
4、auv,具备在深海海底坐底多点位观测功能,在多点位长期观测后,浮出水面将数据传输至陆地接收站;
5、所述auv包括auv本体、水平推进装置、浮力调节装置、垂直推进装置、陆地通信天线及坐底装置,其中auv本体的重心位于形心之下,水平推进装置设置于auv本体的形心平面上;浮力调节装置设置于水平推进装置的上方,用于auv本体的浮心位置变换;陆地通信天线设置于auv本体的艏部,用于与陆地接收站通讯;垂直推进装置和坐底装置设置于auv本体的艉部,坐底装置用于auv本体坐底于深海海底。
6、所述垂直推进装置和所述坐底装置均为多个,且间隔交替设置。
7、所述坐底装置包括坐底支架和液压驱动杆,其中坐底支架的一端与所述auv本体的艉部铰接,液压驱动杆的尾部与坐底支架的另一端铰接,液压驱动杆的输出端与所述auv本体铰接;
8、当所述auv坐底观测时,液压驱动杆驱动坐底支架展开,支撑于海底;
9、当所述auv航行时,液压驱动杆驱动坐底支架折叠贴在auv本体上。
10、所述陆地通信天线包括电机、蜗轮蜗杆机构及天线,其中电机的输出端与蜗轮蜗杆机构中的涡轮固连,天线与蜗轮蜗杆机构的蜗杆固连,电机通过蜗轮蜗杆机构驱动天线伸缩。
11、所述垂直剖面auv本体的上部还设有无线充电装置和数据传输装置,可与深海实验站对接进行充电与数据交互。
12、所述auv本体为鱼雷体外形,且艏部与艉部形状相同。
13、所述auv在向地面传输数据时,利用所述浮力调节装置和所述垂直推进装置实现所述auv浮出水面作业;利用卫星实现所述auv与陆地接收站建立远程通讯,进行数据传输;在完成数据传输后,所述auv下潜继续开展海底多点位观测。
14、本发明的优点及有益效果是:本发明提供的一种深海多点位坐底观测auv系统,能够反复在水平运动与垂直运动之间相切换,实现长期深海环境多个规划点位的坐底观测,在观测完成后,能够浮出水面将探测数据向陆地传输,然后再次下潜开展多点位坐底观测,以便于科研人员进行分析,提高深海长期监测能力。
技术特征:
1.一种深海多点位坐底观测auv系统,其特征在于:包括
2.根据权利要求1所述的深海多点位坐底观测auv系统,其特征在于,所述auv(1)包括auv本体(101)、水平推进装置(102)、浮力调节装置(103)、垂直推进装置(104)、陆地通信天线(105)及坐底装置(108),其中auv本体(101)的重心(110)位于形心之下,水平推进装置(102)设置于auv本体(101)的形心平面上;浮力调节装置(103)设置于水平推进装置(102)的上方,用于auv本体(101)的浮心位置变换;陆地通信天线(105)设置于auv本体(101)的艏部,用于与陆地接收站(2)通讯;垂直推进装置(104)和坐底装置(108)设置于auv本体(101)的艉部,坐底装置(108)用于auv本体(101)坐底于深海海底(3)。
3.根据权利要求2所述的深海多点位坐底观测auv系统,其特征在于,所述垂直推进装置(104)和所述坐底装置(108)均为多个,且间隔交替设置。
4.根据权利要求2或3所述的深海多点位坐底观测auv系统,其特征在于,所述坐底装置(108)包括坐底支架(1081)和液压驱动杆(1082),其中坐底支架(1081)的一端与所述auv本体(101)的艉部铰接,液压驱动杆(1082)的尾部与坐底支架(1081)的另一端铰接,液压驱动杆(1082)的输出端与所述auv本体(101)铰接;
5.根据权利要求2所述的深海多点位坐底观测auv系统,其特征在于,所述陆地通信天线(105)包括电机(1051)、蜗轮蜗杆机构(1052)及天线(1053),其中电机(1051)的输出端与蜗轮蜗杆机构(1052)中的涡轮固连,天线(1053)与蜗轮蜗杆机构(1052)的蜗杆固连,电机(1051)通过蜗轮蜗杆机构(1052)驱动天线(1053)伸缩。
6.根据权利要求2所述的深海多点位坐底观测auv系统,其特征在于,所述垂直剖面auv本体(101)的上部还设有无线充电装置(106)和数据传输装置(107)。
7.根据权利要求2所述的深海多点位坐底观测auv系统,其特征在于,所述auv本体(101)为鱼雷体外形,且艏部与艉部形状相同。
8.根据权利要求2所述的深海多点位坐底观测auv系统,其特征在于,所述auv(1)在向地面传输数据时,利用所述浮力调节装置(103)和所述垂直推进装置(104)实现所述auv(1)浮出水面作业;利用卫星实现所述auv(1)与所述陆地接收站(2)建立远程通讯,进行数据传输;在完成数据传输后,所述auv(1)下潜继续开展海底多点位观测。
技术总结
本发明属于深海探测技术领域,特别涉及一种深海多点位坐底观测AUV系统。包括AUV,AUV包括AUV本体、水平推进装置、浮力调节装置、垂直推进装置、陆地通信天线及坐底装置,其中AUV本体的重心位于形心之下,水平推进装置设置于AUV本体的形心平面上;浮力调节装置设置于水平推进装置的上方,用于AUV本体的浮心位置变换;陆地通信天线设置于AUV本体的艏部,用于与陆地接收站通讯;垂直推进装置和坐底装置设置于AUV本体的艉部,坐底装置用于AUV本体坐底于深海海底。本发明所设计AUV结构简单,运动灵活,能够根据任务需求在深海海底进行多点位坐底长期观测,在观测后能够浮出水面将数据传输至陆地接收站,再次下潜至海底进行多点位观测。
技术研发人员:吕凤天,徐会希,白云鹏,赵红印
受保护的技术使用者:中国科学院沈阳自动化研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!