舶筏架姿态控制方法、设备及存储介质与流程
本发明涉及筏架控制,尤其涉及一种船舶筏架姿态控制方法、设备及存储介质。
背景技术:
1、近年来,国内在大载荷气囊隔振器理论设计、制造工艺等方面已取得突破性进展,并应用于许多工业领域大型设备的高效隔振。尤其在船舶大型动力设备的噪声治理方面,采用气囊隔振器的船舶筏架隔振系统,能大幅衰减设备振动向船体的传递。然而,由于船舶筏架隔振系统长时间工作,气囊隔振器不均匀的漏气或者船舶筏架隔振系统重量分布的局部变化,会导致船舶筏架隔振系统发生倾斜,影响船舶筏架隔振系统的安全性和隔振效果。
2、现有的船舶筏架姿态控制方法,例如渐进式调节方式,其根据多个垂直方向位移传感器的均值得到当前气囊隔振器质心的高度值,根据当前质心的高度值与期望值的高度差等比例划分,确定质心的高度调节步长h,后续在对气囊隔振器进行充放气操作时,根据固定步长h,以步进的方式提升或者降低质心的高度,进而控制船舶达到平衡姿态。这种方式调节速度相对较慢,特别是在气囊隔振装置质心需要提升较大步长的高度时,全程需要通过多步完成,过程繁琐;其次,由于无法动态调节步长,可能会导致气囊隔振装置质心最终达到的实际高度值与期望值存在一定的偏差,难以保证调节精度。
技术实现思路
1、本发明的主要目的在于提供一种船舶筏架姿态控制方法、设备及存储介质,旨在解决现有的船舶筏架姿态控制方法,存在调节速度慢和调节精度低的问题。
2、为实现上述目的,第一方面,本发明提供一种船舶筏架姿态控制方法,包括:
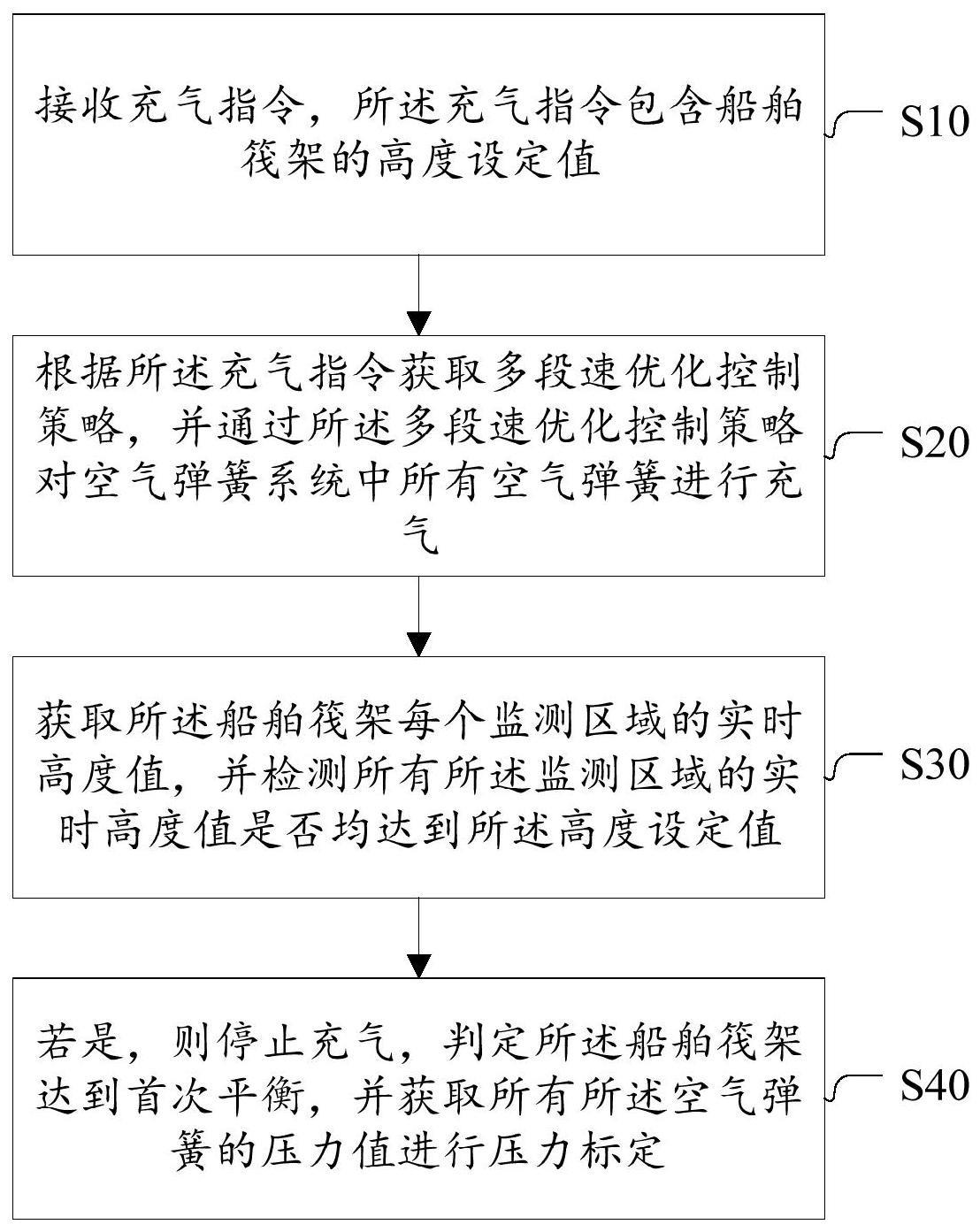
3、接收充气指令,所述充气指令包含船舶筏架的高度设定值;
4、根据所述充气指令获取多段速优化控制策略,并通过所述多段速优化控制策略对空气弹簧系统中所有空气弹簧进行充气;
5、获取所述船舶筏架每个监测区域的实时高度值,并检测所有所述监测区域的实时高度值是否均达到所述高度设定值;
6、若是,则停止充气,判定所述船舶筏架达到首次平衡,并获取所有所述空气弹簧的压力值进行压力标定。
7、第二方面,本发明还提供一种计算机设备,包括:存储器和处理器,所述存储器中存储有船舶筏架姿态控制程序,所述处理器执行所述船舶筏架姿态控制程序时实现第一方面所述的船舶筏架姿态控制方法。
8、第三方面,本发明还提供一种计算机可读存储介质,其上存储有船舶筏架姿态控制程序,所述船舶筏架姿态控制程序被处理器执行时实现第一方面所述的船舶筏架姿态控制方法。
9、上述船舶筏架姿态控制方法、设备及存储介质,在首次平衡阶段,通过多段速优化控制策略,依次对空气弹簧系统中所有空气弹簧进行快速和慢速闭环充气,并在充气控制过程中,通过实时监控船舶筏架的高度来判定船舶筏架是否达到首次平衡,实现了筏架姿态智能控制,提高了筏架姿态调节速度及筏架姿态调节精度。
技术特征:
1.一种船舶筏架姿态控制方法,其特征在于,所述船舶筏架姿态控制方法包括:
2.如权利要求1所述的船舶筏架姿态控制方法,其特征在于,所述多段速优化控制策略包含快速充气控制阶段和慢速充气控制阶段;
3.如权利要求1所述的船舶筏架姿态控制方法,其特征在于,所述船舶筏架姿态控制方法还包括:
4.如权利要求3所述的船舶筏架姿态控制方法,其特征在于,所述高度数据序列包含所述船舶筏架中每个监测区域的实时高度值;
5.如权利要求4所述的船舶筏架姿态控制方法,其特征在于,所述根据所述高度设定值和每个所述监测区域的实时高度值,获取每个所述监测区域的高度误差,包括:
6.如权利要求4所述的船舶筏架姿态控制方法,其特征在于,所述根据所述船舶筏架的高度数据序列和所述空气弹簧系统的压力数据序列,对所述空气弹簧系统进行漏气判断,得到漏气弹簧,包括:
7.如权利要求3所述的船舶筏架姿态控制方法,其特征在于,所述船舶筏架姿态控制方法还包括:
8.如权利要求3所述的船舶筏架姿态控制方法,其特征在于,所述船舶筏架姿态控制方法还包括:
9.一种计算机设备,其特征在于,所述计算机设备包括:存储器和处理器,所述存储器中存储有船舶筏架姿态控制程序,所述处理器执行所述船舶筏架姿态控制程序时实现如权利要求1至8中任一项所述的船舶筏架姿态控制方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有船舶筏架姿态控制程序,所述船舶筏架姿态控制程序被处理器执行时实现如权利要求1至8中任一项所述的船舶筏架姿态控制方法。
技术总结
本发明公开了一种船舶筏架姿态控制方法、设备及存储介质,其方法包括:接收充气指令,该充气指令包含船舶筏架的高度设定值;根据充气指令获取多段速优化控制策略,并通过多段速优化控制策略对空气弹簧系统中所有空气弹簧进行充气;获取船舶筏架每个监测区域的实时高度值,并检测所有监测区域的实时高度值是否均达到高度设定值;若是,则停止充气,判定船舶筏架达到首次平衡,并获取所有空气弹簧的压力值进行压力标定。本发明实现了筏架姿态智能控制,提高了筏架姿态调节速度及筏架姿态调节精度。
技术研发人员:卢一,谭高辉,周熙盛,王虎,陈康,马倩倩
受保护的技术使用者:湖南弘辉科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!