潜航器肋骨、潜航器及潜航器制造方法与流程
本发明涉及潜航器耐压壳体应用,特别涉及一种潜航器肋骨、潜航器及潜航器制造方法。
背景技术:
1、潜航器是进行水下航行的设备。潜航器主要为无人潜航器,无人潜航器是没有人驾驶、靠遥控或自动控制在水下航行的器具,主要指那些代替潜水员或载人小型潜艇进行深海探测、救生、排除水雷等高危险性水下作业的智能化系统。因此,无人潜航器也被称为“潜水机器人”或“水下机器人”。无人潜航器按应用领域,可分为军用与民用。在军用领域上,无人潜航器可作为一种新概念武器中无人作战平台武器。从这某层意义上说,无人潜航器的作用和无人机作用差不多。
2、现有技术中,无人潜航器主要包括艇身以及推进器等设备,而艇身则主要由耐压壳体组成,耐压壳体通常采用“壳体+肋骨”的结构形式。肋骨均为环形结构,且均是沿耐压壳体的延伸方向间隔分布在耐压壳体的内部或者外部。
3、现有技术中,耐压壳体的肋骨主要为环形结构。虽然环形结构的肋骨能够对潜航器的耐压壳起到支撑功能,然而环形结构的肋骨的支撑刚度不够,导致耐压壳体的稳定较低。
技术实现思路
1、本发明的主要目的是提供一种潜航器肋骨、潜航器及潜航器制造方法,旨在解决相关技术中的环形结构的肋骨的支撑刚度不够,导致耐压壳体的稳定较低的技术问题。
2、为实现上述目的,第一方面,本发明提出的一种潜航器肋骨,所述潜航器肋骨包括:
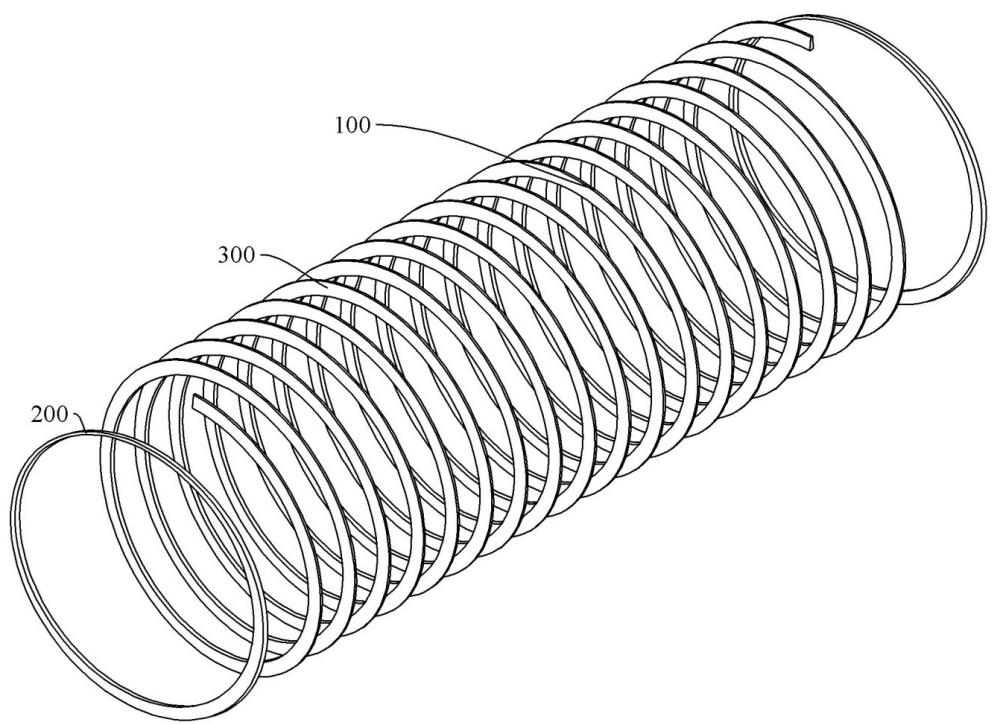
3、第一骨体,所述第一骨体呈螺旋状环绕设置并连接于所述潜航器的内壁,所述第一骨体包括多个螺旋段,多个所述螺旋段沿所述潜航器的内壁的延伸方向依次分布,任意相邻的两个螺旋段相互连接,且多个所述螺旋段一体成型设置。
4、可选地,多个所述螺旋段沿所述潜航器的内壁的延伸方向依次均匀分布,以使任意相邻的两个所述螺旋段之间的螺距相同。
5、可选地,各所述螺旋段的横截面形状一致且面积相同,所述螺旋段的横截面的轮廓呈环形闭合结构,且所述环形闭合结构的至少一处与所述潜航器的内壁连接。
6、可选地,所述环形闭合结构为多边形结构,所述多边形结构包括多个依次首尾相连的棱边,且所述环形闭合结构的至少一个棱边与所述潜航器的内壁面接触连接。
7、可选地,所述多边形结构为矩形结构;或者,所述多边形结构为梯形结构。
8、可选地,所述多边形结构包括连接段和延伸段,所述连接段上的至少一个棱边与所述潜航器的内壁面接触连接,所述延伸段自所述连接端的一端朝远离所述潜航器的内壁的方向延伸。
9、可选地,任意相邻的两个所述螺旋段之间的螺距为a,其中,200mm≤a≤430mm。
10、可选地,所述潜航器肋骨还包括两个第二骨体,两个所述第二骨体分别抵接于所述第一骨体的两端,两个所述第二骨体均为环形闭合骨体,且各所述第二骨体的内径与所述第一骨体的内径相同。
11、基于相同的技术构思,第二方面,本发明提出一种潜航器,包括长舱段,所述长舱段包括:
12、第一方面所述的潜航器肋骨;以及,
13、耐压壳,所述耐压壳的内壁形成所述潜航器的内壁。
14、基于相同的技术构思,第三方面,本发明提出一种潜航器制造方法,用于制造第二方面所述的潜航器;
15、所述潜航器制造方法包括如下步骤:
16、获取所述长舱段的长度以及所述耐压壳的外径,形成所述预设参数;
17、根据所述预设参数确定所述长舱段的设计参数;其中,所述设计参数包括所述耐压壳的壁厚、所述潜航器肋骨的尺寸以及相邻两段所述螺旋段之间的螺距;
18、根据所述设计参数制造所述耐压壳以及所述潜航器肋骨;
19、将所述潜航器肋骨安装于所述耐压壳内以制造所述潜航器。
20、本发明技术方案通过设置第一骨体,将第一骨体呈螺旋状环绕设置并连接于潜航器的内壁,将第一骨体包括多个螺旋段,多个螺旋段沿潜航器的内壁的延伸方向依次分布,让任意相邻的两个螺旋段相互连接,且多个螺旋段一体成型设置,使得螺旋型耐压壳体的肋骨形成一体结构,也无需在肋骨之间设置额外的结构进行连接,使得耐压壳体的整体结构变得更为精简,同时也使得耐压壳体在整体质量未增加的基础上提升了耐压壳体的刚度,保证了耐压壳体的稳定性。
技术特征:
1.一种潜航器肋骨,其特征在于,所述潜航器肋骨包括:
2.如权利要求1所述的潜航器肋骨,其特征在于,多个所述螺旋段沿所述潜航器的内壁的延伸方向依次均匀分布,以使任意相邻的两个所述螺旋段之间的螺距相同。
3.如权利要求1所述的潜航器肋骨,其特征在于,各所述螺旋段的横截面形状一致且面积相同,所述螺旋段的横截面的轮廓呈环形闭合结构,且所述环形闭合结构的至少一处与所述潜航器的内壁连接。
4.如权利要求3所述的潜航器肋骨,其特征在于,所述环形闭合结构为多边形结构,所述多边形结构包括多个依次首尾相连的棱边,且所述环形闭合结构的至少一个棱边与所述潜航器的内壁面接触连接。
5.如权利要求4所述的潜航器肋骨,其特征在于,所述多边形结构为矩形结构;或者,所述多边形结构为梯形结构。
6.如权利要求4所述的潜航器肋骨,其特征在于,所述多边形结构包括连接段和延伸段,所述连接段上的至少一个棱边与所述潜航器的内壁面接触连接,所述延伸段自所述连接端的一端朝远离所述潜航器的内壁的方向延伸。
7.如权利要求1至6中任一项所述的潜航器肋骨,其特征在于,任意相邻的两个所述螺旋段之间的螺距为a,其中,200mm≤a≤430mm。
8.如权利要求1至6中任一项所述的潜航器肋骨,其特征在于,所述潜航器肋骨还包括两个第二骨体,两个所述第二骨体分别抵接于所述第一骨体的两端,两个所述第二骨体均为环形闭合骨体,且各所述第二骨体的内径与所述第一骨体的内径相同。
9.一种潜航器,其特征在于,包括长舱段,所述长舱段包括:
10.一种潜航器制造方法,其特征在于,用于制造如权利要求9所述的潜航器;
技术总结
本发明涉及潜航器耐压壳体应用技术领域,特别涉及一种潜航器肋骨、潜航器及潜航器制造方法,通过设置第一骨体,将第一骨体呈螺旋状环绕设置并连接于潜航器的内壁,将第一骨体包括多个螺旋段,多个螺旋段沿潜航器的内壁的延伸方向依次分布,让任意相邻的两个螺旋段相互连接,且多个螺旋段一体成型设置,使得螺旋型耐压壳体的肋骨形成一体结构,也无需在肋骨之间设置额外的结构进行连接,使得耐压壳体的整体结构变得更为精简,同时也使得耐压壳体在整体质量未增加的基础上提升了耐压壳体的刚度,保证了耐压壳体的稳定性。
技术研发人员:乔建毅,王冠博,马丽然,李小磊,何刚文,文享龙,罗倩菲
受保护的技术使用者:季华实验室
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!