一种船艉轴转速的控制方法、装置及存储介质与流程
本申请涉及船舶动力,具体涉及一种船艉轴转速的控制方法、装置及存储介质。
背景技术:
1、船舶运行的过程涉及到多个系统的协同作用和控制。其中一个重要的系统就是船舶主机的控制系统,它负责控制船艉轴的转速,以保证船舶运行的平稳和安全。
2、船艉轴转速的控制受转子热应力影响,然而,由于转子热应力并不能直接测量,现有船艉轴转速的控制方式往往只能靠经验来限制转速变化的速率。这种方式无法保证转子热应力不超限,也就无法实现转速快速跟踪指令,影响船舶的机动性能和运行平稳性。
技术实现思路
1、本申请提供一种船艉轴转速的控制方法,通过获取转速参考值和速率变化范围来控制第一转速的变化,解决现有技术中的无法实现转速快速跟踪指令,影响船舶的机动性能和运行平稳性的问题;本申请还提供一种船艉轴转速的控制装置;本申请还提供一种计算机可读存储介质。
2、本申请第一方面提供一种船艉轴转速的控制方法,用于控制所述船艉轴转速,所述控制方法包括:
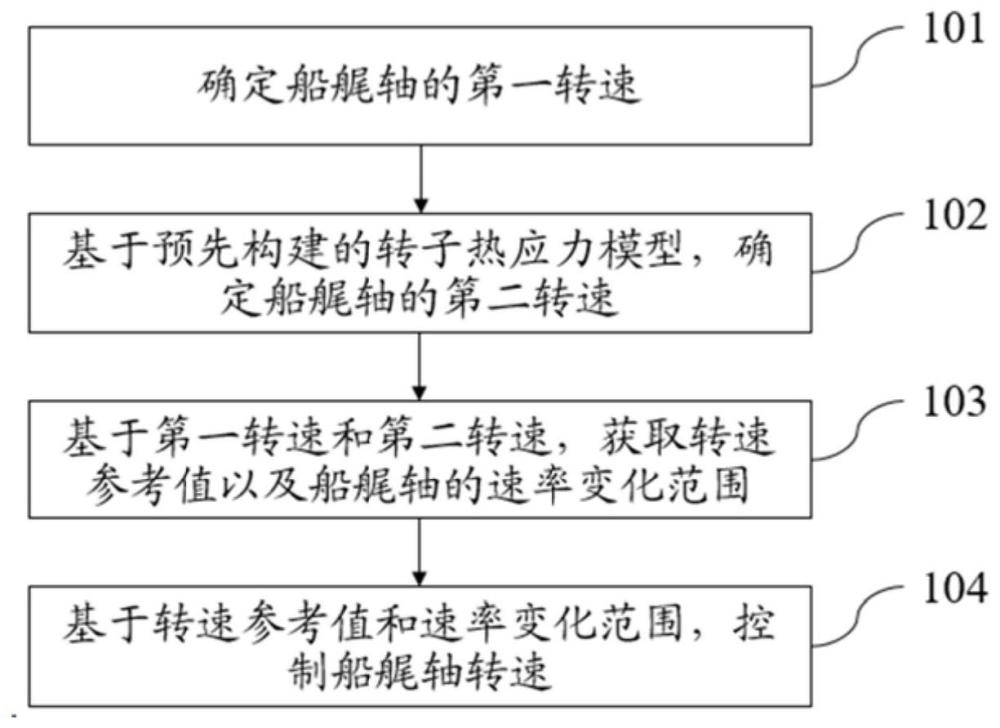
3、确定所述船艉轴的第一转速;
4、基于预先构建的转子热应力模型,确定所述船艉轴的第二转速;
5、基于所述第一转速和所述第二转速,获取转速参考值以及所述船艉轴的速率变化范围;
6、基于所述转速参考值和所述速率变化范围,控制所述船艉轴转速。
7、在第一方面的一种可实现方式中,所述第一转速被配置为表征实时转速;所述第二转速被配置为表征最大承受转速。
8、在第一方面的一种可实现方式中,基于预先构建的转子热应力模型,确定所述船艉轴的第二转速的步骤,进一步包括:
9、确定所述船艉轴的实时表面温度和实时表面压力;
10、确定所述实时表面压力对应的放热系数;
11、基于所述实时表面温度和所述放热系数,确定所述船艉轴的热流密度;
12、基于所述热流密度,确定所述船艉轴的理论热应力;
13、确定所述船艉轴的实际热应力;
14、基于所述理论热应力和所述实际热应力,确定所述第二转速。
15、在第一方面的一种可实现方式中,确定所述船艉轴的速率变化范围的步骤,进一步包括:
16、对所述第二转速进行临界条件判断,获取理论转速变化率;
17、基于所述理论转速变化率,获取理论越限时间;
18、基于所述理论越限时间和理论热应力,获取转速变化率;
19、基于所述第一转速和所述转速变化率,获取所述速率变化范围。
20、在第一方面的一种可实现方式中,基于所述转速参考值和所述速率变化范围,控制所述船艉轴转速的步骤,进一步包括:
21、确定柴油机的喷油量和输出功率;
22、基于所述喷油量和所述输出功率获取所述船艉轴转速的调整速率,所述调整速率位于所述速率变化范围内;
23、基于所述调整速率调整所述第一转速,直至所述第一转速达到所述转速参考值。
24、在第一方面的一种可实现方式中,所述实时表面温度根据以下步骤获取:
25、确定所述船艉轴上多个测温点的表面测量温度;
26、基于预先构建的温度分布数据库,对所述表面测量温度进行折算,获取所述实时表面温度。
27、在第一方面的一种可实现方式中,所述温度分布数据库基于以下步骤预先构建:
28、在所述船艉轴上设置多个所述测温点;
29、基于船舶运行工况,采集所述测温点的多个参考温度;
30、基于多个所述参考温度,获取所述测温点在任一所述船舶运行工况下的理论温度;
31、将所有所述理论温度共同确定为所述温度分布数据库。
32、在第一方面的一种可实现方式中,还包括:
33、基于所述第一转速获取船舶对水速度;
34、基于所述实时表面温度和所述船舶对水速度,获取所述船艉轴的健康状态。在第一方面的一种可实现方式中,所述船舶对水速度基于以下公式获取:
35、v=a+b×ω,
36、其中,v为所述船舶对水速度,ω为所述第一转速,a、b为修正参数。
37、在第一方面的一种可实现方式中,获取船艉轴的第一转速的步骤,进一步包括:
38、将与所述船艉轴电连接的测速电机的直流电压转换为脉冲信号;
39、对所述脉冲信号进行计数,获取所述第一转速。
40、相应的,本申请第二方面还提供一种船艉轴转速的控制装置,用于执行如第一方面中任意一种可实现方式中所述的船艉轴转速的控制方法,所述控制装置包括:
41、第一获取模块,所述第一转速获取模块被配置为确定所述船艉轴的第一转速;
42、第二获取模块,所述第二转速获取模块被配置为基于预先构建的转子热应力模型,获取所述船艉轴的第二转速;
43、第三获取模块,所述第三获取模块被配置为基于所述第一转速和所述第二转速,获取转速参考值以及所述船艉轴的速率变化范围;
44、控制模块,所述控制模块被配置为基于所述转速参考值和所述速率变化范围,控制所述船艉轴转速。
45、相应的,本申请第三方面还提供一种计算机可读存储介质,所述计算机可读介质存储用于计算设备执行的指令,所述计算设备执行所述指令时,实现如第一方面中任一项所述的方法。
46、与现有技术相比,本申请提供的一种船艉轴转速的控制方法,用于控制船艉轴转速,控制方法包括:确定船艉轴的第一转速;基于预先构建的转子热应力模型,获取船艉轴的第二转速;基于第一转速和第二转速,获取转速参考值以及船艉轴的速率变化范围;基于转速参考值和速率变化范围,控制船艉轴转速。如此,本申请结合第一转速和理论上的第二转速,获取当前时刻的转速参考值,同时结合船艉轴的第二转速获取速率变化范围,从而在速率变化范围内,根据转速参考值控制第一转速的变化,实现转速快速跟踪指令,提升船舶的机动性能和运行平稳性。
47、与现有技术相比,本申请提供的一种船艉轴转速的控制装置,用于执行如第一方面中任意一种可实现方式中所述的船艉轴转速的控制方法。可以理解的是,控制装置具有上述控制方法的所有技术特征以及有益效果,在此不再赘述。
技术特征:
1.一种船艉轴转速的控制方法,其特征在于,用于控制所述船艉轴转速,所述控制方法包括:
2.如权利要求1所述的船艉轴转速的控制方法,其特征在于,所述第一转速被配置为表征实时转速;所述第二转速被配置为表征最大承受转速。
3.如权利要求1所述的船艉轴转速的控制方法,其特征在于,基于预先构建的转子热应力模型,确定所述船艉轴的第二转速的步骤,包括:
4.如权利要求1所述的船艉轴转速的控制方法,其特征在于,确定所述船艉轴的速率变化范围的步骤,包括:
5.如权利要求1所述的船艉轴转速的控制方法,其特征在于,基于所述转速参考值和所述速率变化范围,控制所述船艉轴转速的步骤,包括:
6.如权利要求3所述的船艉轴转速的控制方法,其特征在于,所述实时表面温度根据以下步骤获取:
7.如权利要求6所述的船艉轴转速的控制方法,其特征在于,所述温度分布数据库基于以下步骤预先构建:
8.如权利要求6所述的船艉轴转速的控制方法,其特征在于,还包括:
9.如权利要求8所述的船艉轴转速的控制方法,其特征在于,所述船舶对水速度基于以下公式获取:
10.如权利要求1所述的船艉轴转速的控制方法,其特征在于,获取船艉轴的第一转速的步骤,进一步包括:
11.一种船艉轴转速的控制装置,其特征在于,用于执行如权利要求1至9中任意一项所述的船艉轴转速的控制方法,所述控制装置包括:
12.如权利要求11所述的船艉轴转速的控制装置,其特征在于,所述第三获取模块包括速率变化范围获取单元,所述速率变化范围获取单元被配置为执行以下步骤:
13.一种计算机可读存储介质,其特征在于,所述计算机可读介质存储用于计算设备执行的指令,所述计算设备执行所述指令时,实现如权利要求1-10中任一项所述的方法。
技术总结
本申请公开了一种船艉轴转速的控制方法、装置及存储介质,涉及船舶动力技术领域。用于控制船艉轴转速,控制方法包括:确定船艉轴的第一转速;基于预先构建的转子热应力模型,确定船艉轴的第二转速;基于第一转速和第二转速,获取转速参考值以及船艉轴的速率变化范围;基于转速参考值和速率变化范围,控制船艉轴转速。如此,本申请结合第一转速和理论上的第二转速,获取当前时刻的转速参考值,同时结合船艉轴的第二转速获取速率变化范围,从而在速率变化范围内,根据转速参考值控制第一转速的变化,实现转速快速跟踪指令,提升船舶的机动性能和运行平稳性。
技术研发人员:顾智超,彭杰伟,焦庆,丁一,楼佳颖,冯金勇
受保护的技术使用者:中国船舶集团有限公司第七一一研究所
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!