一种可下潜扫描的无人测绘船及其测绘系统的制作方法
本发明涉及一种测绘船,具体为一种可下潜扫描的无人测绘船及其测绘系统,属于测绘船。
背景技术:
1、海洋测绘是获取和描绘海洋、江河、湖泊等水体和包围水体各对象的基础地理要素及其几何和物理属性信息的理论和技术,是测绘科学与技术的一个重要分支,是一切海洋军事、海洋科学研究及开发和利用活动的基础。海洋测绘主要包括海洋测量、各类测量信息的绘制以及信息的综合管理和利用三大内容。海洋测量是对水体、水底、周围陆地进行测量的理论、技术和方法,按照研究内容和任务可分为海洋大地测量、海洋导航定位、水深测量及水下、海岸带地形测量、海洋遥感、海洋水文测量、海底声学底质测量以及海洋工程测量等内容。
2、现有技术多采用无人声呐测绘船用于对水下地形进行测量。而现如今,在水域之中对水底中的地形地貌进行测绘时,由于河流湖泊中存在各种垃圾,当垃圾的密度大于水体的密度时以及在水流影响下,垃圾容易在水下随着水流进行移动,当遇到水下坑道或是空洞时,会堵在坑道口处,而坑道的堵塞会对声呐的探测造成较大影响,导致堵塞的坑道内部结构无法被精准探测,需要将堵塞的坑道口进行疏通,但是现有疏通装置通过夹持机构将堵塞物取出,但是夹持机构在疏通时需要使结构与堵塞物精准对应,使两个夹板同时与堵塞物两侧接触,否则会夹持不稳,然而在水下洋流的影响下,下潜的疏通装置容易晃动,影响固定效果。
技术实现思路
1、(一)解决的技术问题
2、本发明的目的就在于为了解决上述问题而提供一种可下潜扫描的无人测绘船及其测绘系统,以解决现有技术中现有疏通装置通过夹持机构将堵塞物取出,但是夹持机构在疏通时需要使结构与堵塞物精准对应,使两个夹板同时与堵塞物两侧接触,否则会夹持不稳,然而在水下洋流的影响下,下潜的疏通装置容易晃动,影响固定效果的问题。
3、(二)技术方案
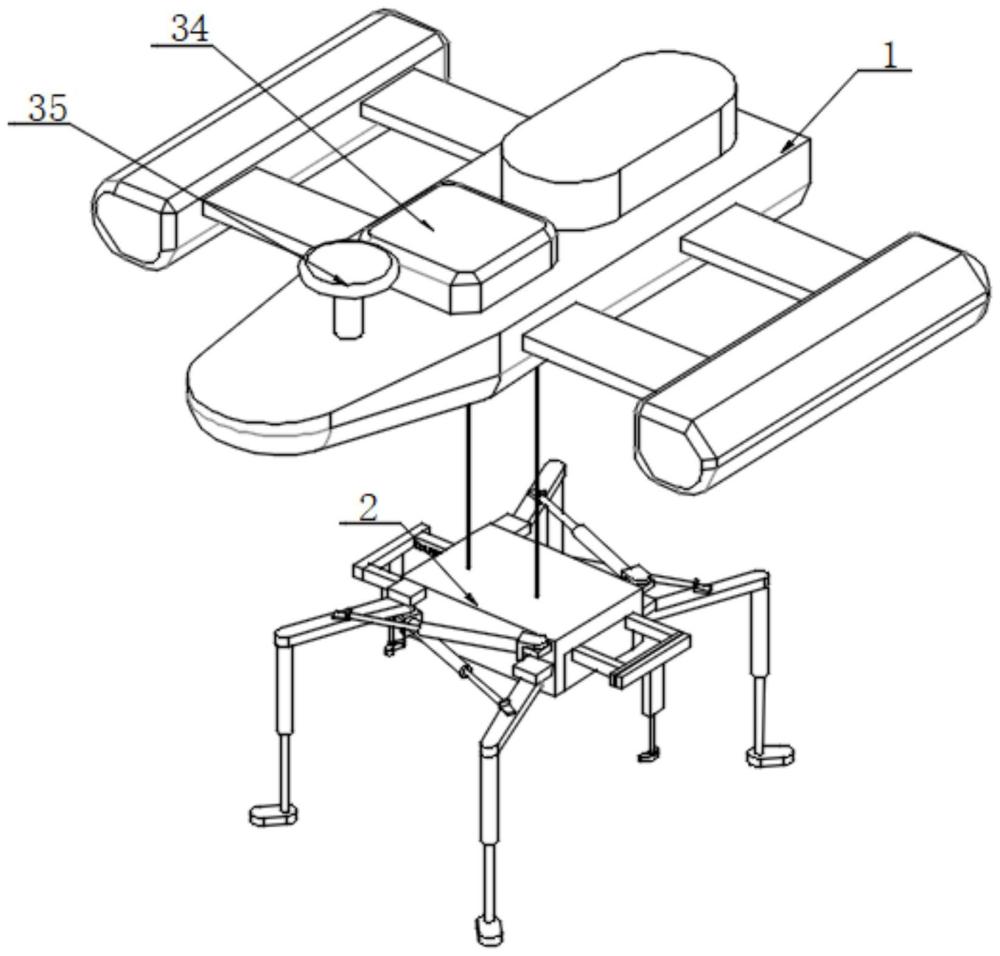
4、为实现以上目的,本发明通过以下技术方案予以实现:一种可下潜扫描的无人测绘船,包括船体,所述船体底部设置有下潜器,所述下潜器两侧均设置有支撑组件,所述下潜器内部两侧相对设置有第一齿板和第二齿板,所述第一齿板和第二齿板分别贯穿下潜器两侧壁并与下潜器滑动连接,所述第一齿板和第二齿板延伸至下潜器外侧一端均固定连接有固定板,两个所述固定板底部均设置有拉伸组件,所述下潜器内部设置有滑动板,所述下潜器内部一侧设置有移动板,所述移动板一端内部开设有空腔,所述移动板空腔内部一侧滑动连接有移动套,所述移动板空腔内部一端固定连接有插接板,所述移动套内部转动连接有转杆,所述转杆顶端固定连接有限位齿轮。
5、优选地,两个所述固定板相对一侧均固定连接有限位板,两个所述限位板分别贯穿下潜器两侧壁并与下潜器滑动连接所述下潜器内部一侧固定连接有定位板,所述滑动板内部开设有滑槽,所述定位板贯穿滑槽并与滑槽滑动连接,所述滑动板两侧分别固定连接有第一齿条和第二齿条,所述下潜器内部一侧固定连接有支杆,所述支杆外侧转动连接有传动齿轮,所述传动齿轮两侧分别与第一齿条和第一齿板啮合连接,使传动齿轮对第一齿板进行限位,带动第一齿板进行移动,所述限位齿轮两侧分别与第二齿条和第二齿板啮合连接,使限位齿轮对第二齿板进行限位,带动第二齿板进行移动。
6、优选地,所述转杆外侧开设有多个卡槽,多个所述卡槽呈环形阵列分布,所述下潜器内部一侧开设有安装槽,所述安装槽内部固定连接有第一液压杆,所述第一液压杆输出端固定连接有推板,所述推板与移动板一端固定连接,使第一液压杆启动时带动推板移动,并使推板带动移动板进行移动,所述移动板空腔内部一端固定连接有滑套,所述滑套内部滑动连接有滑块,所述滑套内部设置有弹簧,所述弹簧两端分别与滑块和滑套固定连接,所述滑块与移动套固定连接,所述移动套内部开设有通槽,所述插接板贯穿通槽并与通槽滑动连接,所述插接板与通槽和多个卡槽相对应,使插接板对转杆进行定位。
7、优选地,所述拉伸组件包括夹板,所述夹板固定连接于固定板底部,所述夹板内部固定连接有第四液压杆,所述第四液压杆底端转动连接有卡接板,使第四液压杆启动带动卡接板进行伸缩,从而便于使卡接板与石块卡接。
8、优选地,所述支撑组件包括两个连接板、两个摆杆和两个第二液压杆,两个所述第二液压杆底端均固定连接有支撑板,两个所述连接板分别固定连接于下潜器两侧,两个所述摆杆分别铰接于两个连接板一侧,两个所述第二液压杆分别固定连接于两个摆杆一端底部,所述下潜器两侧均铰接有铰接板,两个所述铰接板一侧均固定连接有第三液压杆,两个所述第三液压杆输出端均固定连接有转板,两个所述转板分别与两个摆杆铰接,便于调节第二液压杆和支撑板的位置,提高支撑效果。
9、优选地,所述船体底部固定连接有收放箱,所述收放箱与下潜器之间通过钢缆连接,对下潜器进行收放,所述船体顶部一侧固定连接有控制箱和定位器,所述下潜器底部前后两侧均固定连接有摄像头,有利于观察海底情况,所述下潜器底部中间固定连接有声呐测绘仪,便于进行扫描测绘。
10、一种可下潜扫描测绘系统,包括处理器,所述处理器输出端连接有对接模块,所述处理器输出端还连接有环境定位模块,所述处理器输出端还连接有视觉观测模块和控制模块,所述视觉观测模块输出端与控制模块连接,所述控制模块输出端连接有测绘数据记录模块,所述测绘数据记录模块输出端与处理器连接,所述处理器输入端连接有远程控制端。
11、优选地,所述对接模块包括回收单元、布放单元和船体辅助对接单元,便于控制下潜器进行收放作业,所述环境定位模块包括北斗定位单元、深度传感器和定位矫正单元,便于对船体进行定位。
12、优选地,所述视觉观测模块包括视觉定位单元所述视觉定位单元输出端连接有图形数据获取单元,所述图形数据获取单元输出端连接有图像计算单元,所述图像计算单元输出端连接有调整观测角度,所述控制模块包括第一操控单元、第二操控单元、第三操控单元和第四操控单元,对观测角度进行调整。
13、优选地,所述测绘数据记录模块包括声呐监测单元,所述声呐监测单元输出端连接有坐标建立单元,所述坐标建立单元输出端连接有数据计算单元,所述数据计算单元输出端连接有数据比对单元,对测绘数据进行监测。
14、本发明提供了一种可下潜扫描的无人测绘船及其测绘系统,其具备的有益效果如下:
15、1、该可下潜扫描的无人测绘船,通过船体行驶到探测区域,并使收放箱将下潜器下放到水中进行下潜,使声呐测绘仪启动进行扫描测绘,并通过摄像头对周围环境进行贯彻,当发现疑似有被石头或杂物堵住的坑洞时,控制船体行驶到坑洞附近,并使下潜器下潜到杂物上方,将杂物挪开再进行测绘。
16、2、该可下潜扫描的无人测绘船,当遮挡物为不对称不规则的形状时例如石块等,通过第三液压杆启动带动转板进行伸长,并使转板推动摆杆进行偏转,并使摆杆带动第二液压杆和第一齿板进行移动,从而使多个第二液压杆和支撑板张开,同时多个第二液压杆启动,使多个第二液压杆带动多个支撑板与附近可支撑物体接触,并通过第一液压杆启动推动推板移动,推板带动移动板移动,移动板带动移动套移动,并使移动套带动转杆和限位齿轮进行移动,限位齿轮在移动时会带动第二齿板和第二齿条同时移动,插接板此时插入转杆卡槽内部,对转杆进行限位,所以转杆此时无法转动,第二齿板在移动时带动与第二齿板连接的固定板移动,第二齿条移动时带动滑动板移动,滑动板带动第一齿条移动,同时使第一齿条在移动时推动传动齿轮进行转动,使传动齿轮转动带动第一齿板朝向第一齿条的反向移动,并使第一齿板带动与第一齿板连接的固定板进行移动,使两个固定板相对移动,并带动两个夹板向内移动,使两个夹板对遮挡物两侧进行夹持,
17、3、该可下潜扫描的无人测绘船,当遮挡物为不规则形状,或者因为下潜器下潜的位置没有正好处于遮挡物中间,还有可能是下潜器在下潜过程中被水流推动,没有准确的落在指定位置,所以两个夹板与遮挡物之间的距离是不同的,在两个夹板向内收缩靠近遮挡物时,会有一个夹板先与遮挡物接触,在此实施例中我们假设是与第二齿板连接的固定板底部固定的夹板先与遮挡物接触,夹板在遮挡物的阻挡下无法继续移动,所以当移动板在继续移动时,第二齿板对限位齿轮进行限位,同时插接板插在转杆内部,转杆无法转动,所以移动板在移动时拉动移动套在移动板内部滑动,滑动的同时推动滑块移动,滑块对弹簧进行挤压,同时转杆在移动时与插接板脱离,当转杆脱离后,转杆可以自由转动,使第二齿板对限位齿轮进行限位,当转杆在移动时进行转动,使转杆带动限位齿轮转动,而限位齿轮又推动第二齿条继续移动,使第二齿条带动滑动板和第一齿条进行移动,第一齿条带动传动齿轮转动,同时带动第一齿板进行反向移动,使第一齿板带动与其连接的固定板和夹板向遮挡物继续移动,从而使两个夹板最终都与遮挡物两侧进行接触,从而对遮挡物进行夹持,最后将遮挡物抬起对坑道进行测绘,有利于将坑道上方的遮挡物移开,从而方便对坑道进行测绘,并且可以对不对称的遮挡物进行搬运,同时对下潜器下潜的控制无需特别精准即可搬运遮挡物,操作方便,使得测绘结果更加精准。
18、4、该可下潜扫描测绘系统,通过处理器对视觉观测模块发出信号,使视觉观测模块对视觉定位单元发出指令,使视觉定位单元进行视觉定位,并通过视觉观测模块对图形数据获取单元发出指令,使图形数据获取单元获取监测图像数据,并使图像计算单元对图像数据进行计算,最后通过调整观测角度控制观测角度进行调整,通过视觉观测模块对控制模块发出信号,并通过第一操控单元、第二操控单元、第三操控单元和第四操控单元分别控制第三液压杆、第二液压杆、第四液压杆和第一液压杆的启动,通过控制模块对测绘数据记录模块发出信号,使测绘数据记录模块对声呐监测单元发出指令,使声呐监测单元对当前水域进行测绘操作,当发现坑道后,并通过坐标建立单元对当前坐标进行标记,当坑道前的遮挡物被移除后,使数据计算单元对声呐监测单元的检测数据进行计算,并且通过数据比对单元对坑道遮挡物移除前后的测绘数据进行对比和记录,有利于控制装置进行测绘操作,并且在对有障碍物的坑道遮挡物进行移除后的测绘数据与移除前的测绘数据进行比对和记录,提高测绘数据的精准度,同时可以对坑道的坐标数据进行记录。
- 还没有人留言评论。精彩留言会获得点赞!