一种海底作业用波动鳍推进水下机器人
本发明涉及水下机器人领域,更具体地说,它涉及一种海底作业用波动鳍推进水下机器人。
背景技术:
1、水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人,水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。
2、公开号为cn113320665b的中国专利公开了一种长鳍波动推进仿生水下机器人,该专利具有良好的机动性、可控性和抗干扰性的特点,应用于在水体波动较大或水体环境复杂的水域中进行勘测与记录。
3、上述专利中的水下机器人在实际使用过程中,无法通过一个驱动器实现两侧推进鳍改变推进方向,无法实现既满足上下推动和左右推动,导致推进效率差,其次只有一个推进的力,无法根据需要进行转向调整,导致使用不方便。
技术实现思路
1、本发明提供一种海底作业用波动鳍推进水下机器人,解决现有技术中,无法通过一个驱动器实现两侧推进鳍改变推进方向,无法实现既满足上下推动和左右推动,导致推进效率差,其次只有一个推进的力,无法根据需要进行转向调整,导致使用不方便的技术问题。
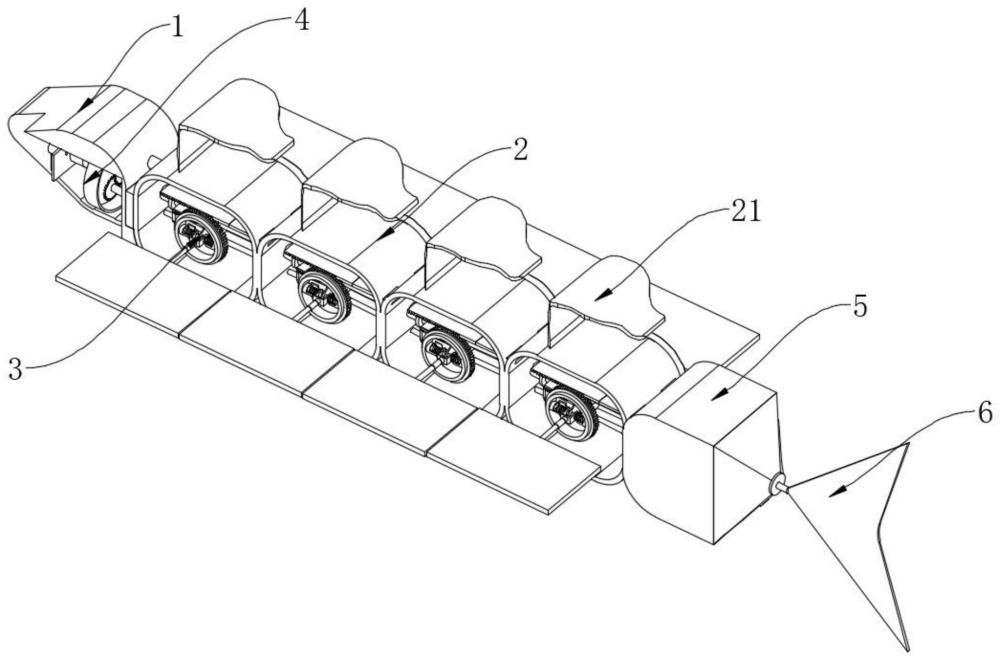
2、根据本发明的一个方面,提供了一种海底作业用波动鳍推进水下机器人,包括控制外壳以及连接外壳,所述控制外壳的后方连接有连接外壳,且连接外壳设置有若干个,每个所述连接外壳的两侧设置有推进机构,连接外壳上端均安装有波动上鳍,所述控制外壳内安装有与推进机构连接的驱动机构,最尾端的连接外壳后端连接有尾鳍安装外壳,所述尾鳍安装外壳上安装有尾鳍控制机构,且尾鳍控制机构与驱动机构对接。
3、进一步地:所述推进机构包括左推进板、右推进板、左联动结构、右联动机构、左伸缩软套和右伸缩软套,所述左伸缩软套和右伸缩软套分别安装在连接外壳两侧端,且左伸缩软套的左端设置有左推进板,所述右伸缩软套右侧右推进板,所述左推进板和右推进板分别通过支杆与左联动结构和右联动机构连接,左联动结构和右联动机构结构相同,均设置在连接外壳内,且左联动结构和右联动机构分别与驱动机构活动对接。
4、进一步地:所述左联动结构包括联动翻板、安装轴杆、联动支架、连接杆、安装外环、左接套环和右接套环,所述联动翻板套接在安装轴杆上,且联动翻板表面上开设有联动齿槽,所述安装轴杆上套接有联动支架,联动支架一端安装有连接杆,所述安装外环外侧端面套接有安装轴承套,且安装轴承套外侧壁通过支板与连接外壳内壁连接,所述安装外环内端两侧内壁上对称安装有左接套环和右接套环,安装轴杆的两端分别插合设置在左接套环和右接套环内;
5、所述安装轴杆的两端分别套接有扭簧,安装轴杆两端通过扭簧与左接套环和右接套环对接。
6、进一步地:所述驱动机构包括总驱动电机、内接转杆、外接套管、联动驱动组件和上接驱动组件,所述总驱动电机通过支板安装在控制外壳内部,总驱动电机的输出端与内接转杆连接,内接转杆上套接有联动驱动组件,所述内接转杆外侧套覆有外接套管,外接套管设置在连接外壳内,所述上接驱动组件一端通过支杆设置在控制外壳内部,上接驱动组件的另一端设置在所述连接外壳内;
7、所述总驱动电机的侧端设置有气泵,气泵的输出端上安装有两根气管,其中一根气管与联动驱动组件内互通,且另一根气管与上接驱动组件连接,两根气管上均安装有电磁阀。
8、进一步地:所述外接套管的外侧套接有外接环,外接环表面上开设有与左联动结构和右联动机构活动啮合的驱动齿槽,所述外接套管中心处开设有用于内接转杆穿透的中心槽,所述外接套管位于外接环安装处内部的中心槽内壁上开设有卡槽,卡槽的数量与外接环数量相匹配,所述内接转杆上设置有与卡槽对应的卡块,卡块与卡槽活动卡接。
9、进一步地:所述联动驱动组件包括联动外环、封闭板、中心齿轮、外接齿槽、驱动环管、内支杆、联动齿轮和联动丝杆,所述联动外环的一端由封闭板封闭,封闭板套接在内接转杆上,所述内接转杆上套接有中心齿轮,联动外环的内壁上开设有外接齿槽,所述驱动环管固定在控制外壳的内壁上,驱动环管内壁贴合设置有活塞,活塞通过轴承套接在内支杆一端,所述内支杆另一端与联动齿轮连接,中心齿轮和外接齿槽分别与联动齿轮活动间接性啮合,所述驱动环管内插合设置有联动丝杆,联动丝杆一部分设置在连接外壳内,所述内支杆一端穿透活塞与联动丝杆连接。
10、进一步地:所述外接套管的外表面上套接有轴承环,且轴承环的下端连接有移动板,移动板通过配套的螺母套接在联动丝杆上,所述外接套管的两侧分别安装有安装侧板,两个安装侧板上均安装有齿条,两个所述齿条分别与左联动结构和右联动机构活动啮合。
11、进一步地:所述上接驱动组件包括驱动套管、驱动杆、内接支架、左侧齿槽和右侧齿槽,所述驱动套管通过支杆固定在控制外壳的内部,驱动套管一端与气泵输出端上的一根气管连接,所述驱动套管的内部贴合设置有活塞,活塞与驱动杆连接,驱动杆一端与内接支架连接,所述内接支架左侧板下端面上开设有左侧齿槽,内接支架右侧板下端面上开设有右侧齿槽,所述左侧齿槽与左侧的安装外环外表面的齿轮套环啮合,右侧齿槽与右侧的安装外环外表面的齿轮套环啮合。
12、进一步地:所述尾鳍安装外壳尾端通过锥形包覆软套与尾鳍控制机构密封套接,所述尾鳍控制机构包括连接转杆、左连接套轴、右连接套轴、固定支架、弧形弯杆、u形支架、安装杆、波动尾鳍和调向装置,所述连接转杆一端与内接转杆尾端连接,连接转杆一端安装有左连接套轴,左连接套轴侧端安装有卡接支架,所述右连接套轴相对端面上安装有与卡接支架卡合的卡接板,且右连接套轴后端套接在后接杆上,后接杆通过穿透固定支架与弧形弯杆连接,所述弧形弯杆一端通过轴杆连接有u形支架,u形支架的u形端口卡套在安装杆外侧,且安装杆外侧两端面均通过轴杆与u形支架内壁连接,所述安装杆的中心处侧端安装有尾鳍杆,尾鳍杆一端与波动尾鳍连接,所述安装杆的上下端分别通过轴承与固定支架连接,且固定支架与调向装置连接。
13、进一步地:所述调向装置包括调向电机、输出杆、旋转板、联动板和安装板,所述安装板固定在尾鳍安装外壳内壁上,调向电机固定在安装板上,所述调向电机的输出端与输出杆连接,输出杆下端与旋转板一端连接,所述旋转板另一端通过轴杆与联动板一端连接,联动板的另一端通过轴杆与固定支架侧端延伸板连接,固定支架一侧上端通过轴杆与安装板连接。
14、本发明的有益效果在于:
15、1、本发明左伸缩软套和右伸缩软套将连接外壳两端进行密封,且伸缩软套软胶质材料制成,便于随着两侧推进板一起移动,在不影响其推动的同时,也能保证壳体内部密封,防止内部进水,通过两侧推进板来回翻动进行推进,实现整个机器人在水下移动,便于完成水下作业。
16、2、本发明整个驱动机构的设置,能够同时驱动多个左推进板和右推进板上下进行翻转,实现上下推动,且可通过驱动机构进行驱动调整,带动多个左推进板和右推进板旋转90°,从而实现多个左推进板和右推进板同时进行左右翻转,实现左右推进,通过一个驱动器,实现多方向推进,有效节省能源,根据实际情况,从而调整推动方向,提高驱动便捷性,也增加整个机器的适配性。
17、3、本发明通过设置尾鳍控制机构,在驱动机构的驱动下实现尾鳍来回摆动,增加推进力,与左右两侧推进板配合,实现快速移动,通过调向装置调整尾鳍角度,根据转向需求,调整尾鳍左右位置,实现推进的同时进行转向控制。
- 还没有人留言评论。精彩留言会获得点赞!