一种半自动调节浮力的水下机器设备
本技术涉及水下机器设备沉浮,具体为一种半自动调节浮力的水下机器设备。
背景技术:
1、水下机器设备作为一种水下测量、作业平台,已经广泛应用在海洋科学研究、海洋工程、海洋资源勘探﹑救援打捞等应用领域,通常水下机器人在作业过程中要保持稳定的浮力状态,如中性状态,以保证正常稳定的工作状态。
2、目前现有水下机器人控制升沉的方法主要有三种,第一种是通过改变自身的浮力来进行调节,通过高压气体来控制水下机器人的排水量,例如潜艇,这种方法的系统结构复杂,适用于大型的水下机器人;第二种是通过推进器的推力的改变来实现水下机器人的升沉运动,例如传统的auv和rov,这种方法使得水下机器人的运动更加灵活,但需要消耗较多的能源;第三种方法是通过降低自身的重量来实现水下机器人的上浮运动,例如auv和水下滑翔机中使用此种方法来保证水下机器人在出现异常情况下能浮出水面,但这种方法只能单向控制水下机器人的上浮运动,而且采用此方法所能提供的正浮力是固定的,对于需要实时改变浮力状态的水下机器人则不适用。
技术实现思路
1、本实用新型的目的在于提供一种半自动调节浮力的水下机器设备,以解决上述背景技术中提出的问题。
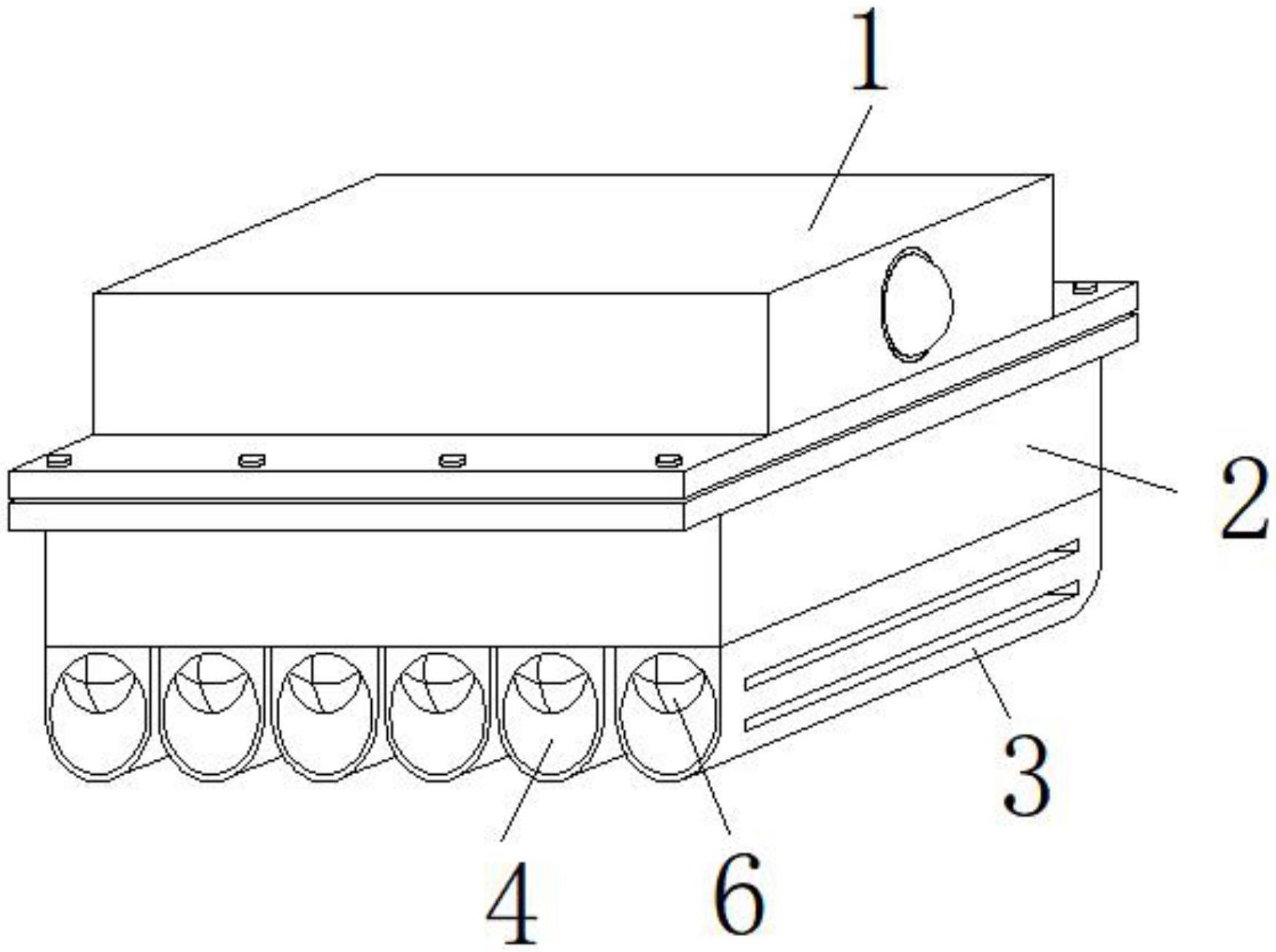
2、为实现上述目的,本实用新型提供如下技术方案:一种半自动调节浮力的水下机器设备,包括水下机器设备本体,所述水下机器设备本体的底部通过螺栓固定连接有密封箱,所述密封箱的底部通过螺栓固定连接有防护罩,所述防护罩的一侧外壁上开设有浮力调节腔,所述浮力调节腔的内部顶部通过螺栓固定连接有电磁阀,所述电磁阀的底部设置有球形气囊,所述密封箱的顶部靠近水下机器设备本体的下方位置处通过螺栓固定连接有密封箱板,且密封箱的内部顶部通过螺栓固定连接有高压罐,所述密封箱的内部底部靠近高压罐的下方位置处通过螺栓固定连接有双向气泵和多通阀,所述双向气泵位于多通阀的一侧,所述高压罐和双向气泵之间、双向气泵和多通阀之间与电磁阀和多通阀之间均通过连接管连接固定。
3、与现有技术相比,本实用新型的有益效果是:该半自动调节浮力的水下机器设备,通过球形气囊的膨胀和收缩,通过控制球形气囊的形变来调节球形气囊的浮力,进而调节水下机器设备本体的浮力,通过浮力的实时调节,可以使得水下机器设备本体进行上浮和下沉,结构简单,浮力可实现调节,从而实时改变浮力状态,适用于小型水下机器人。
技术特征:
1.一种半自动调节浮力的水下机器设备,包括水下机器设备本体(1),其特征在于:所述水下机器设备本体(1)的底部通过螺栓固定连接有密封箱(2),所述密封箱(2)的底部通过螺栓固定连接有防护罩(3),所述防护罩(3)的一侧外壁上开设有浮力调节腔(4),所述浮力调节腔(4)的内部顶部通过螺栓固定连接有电磁阀(5),所述电磁阀(5)的底部设置有球形气囊(6),所述密封箱(2)的顶部靠近水下机器设备本体(1)的下方位置处通过螺栓固定连接有密封箱板(7),且密封箱(2)的内部顶部通过螺栓固定连接有高压罐(8),所述密封箱(2)的内部底部靠近高压罐(8)的下方位置处通过螺栓固定连接有双向气泵(9)和多通阀(10),所述双向气泵(9)位于多通阀(10)的一侧,所述高压罐(8)和双向气泵(9)之间、双向气泵(9)和多通阀(10)之间与电磁阀(5)和多通阀(10)之间均通过连接管(11)连接固定。
2.根据权利要求1所述的一种半自动调节浮力的水下机器设备,其特征在于:所述防护罩(3)的一侧外壁上开设有通槽。
3.根据权利要求1所述的一种半自动调节浮力的水下机器设备,其特征在于:所述浮力调节腔(4)的横截面为圆形结构。
4.根据权利要求1所述的一种半自动调节浮力的水下机器设备,其特征在于:所述球形气囊(6)采用弹性弹性气囊。
5.根据权利要求1所述的一种半自动调节浮力的水下机器设备,其特征在于:所述高压罐(8)的内部填充有高压气体。
6.根据权利要求1所述的一种半自动调节浮力的水下机器设备,其特征在于:所述水下机器设备本体(1)内部设置有控制器和无线信号收发器。
7.根据权利要求1所述的一种半自动调节浮力的水下机器设备,其特征在于:所述高压罐(8)和双向气泵(9)之间通过连接管(11)相连通,所述双向气泵(9)和多通阀(10)之间之通过连接管(11)相连通,所述电磁阀(5)和多通阀(10)之间通过连接管(11)相连通。
8.根据权利要求1所述的一种半自动调节浮力的水下机器设备,其特征在于:所述浮力调节腔(4)共设置有七个,且七个浮力调节腔(4)等间距的分布在密封箱(2)的底部。
技术总结
本技术公开了一种半自动调节浮力的水下机器设备,包括水下机器设备本体,所述水下机器设备本体的底部通过螺栓固定连接有密封箱,所述密封箱的底部通过螺栓固定连接有防护罩,所述防护罩的一侧外壁上开设有浮力调节腔,所述浮力调节腔的内部顶部通过螺栓固定连接有电磁阀,所述电磁阀的底部设置有球形气囊。该半自动调节浮力的水下机器设备,通过球形气囊的膨胀和收缩,通过控制球形气囊的形变来调节球形气囊的浮力,进而调节水下机器设备本体的浮力,通过浮力的实时调节,可以使得水下机器设备本体进行上浮和下沉,结构简单,浮力可实现调节,从而实时改变浮力状态,适用于小型水下机器人。
技术研发人员:崔俊亮,杨嘉豪,洪元星,曹翔
受保护的技术使用者:安徽大学
技术研发日:20230301
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!