一种水下作业机器人的制作方法
本技术属于水下机器人领域,具体地说是一种水下作业机器人。
背景技术:
1、水下机器人又称无人遥控潜水器,用于水下极限作业的机器人,能够辅助人工完成水下打捞、探测等作业,有效的提高了水下作业的安全性和工作效率;
2、根据中国专利申请号为:202222972427.0,公开了一种水下作业机器人,包括底座、前进涡轮、倾斜支架、转动电机、升降涡轮、转动桨叶、壳体、摄像头、连接杆和控制接口;底座侧面与倾斜支架连接;倾斜支架侧面与转动电机连接;转动电机输出端与前进涡轮传动连接;前进涡轮侧面底部与倾斜支架连接;底座顶部与升降涡轮连接;升降涡轮内部与转动桨叶转动连接;对比案例通过底座结构能够增加了装置的整体结构刚性的同时保证了装置的水下操作稳定性,通过前进涡轮与升降涡轮的组合能够有效的提高装置的移动效率,同时提高了装置在水下的移动精度,通过控制接口能够从水面连接向下的控制电缆从而保证了装置的操作稳定性,降低了控制延迟;
3、对比案例有效的解决了现有的水下作业机器人存在水下操作难度大和遥控效率低的问题,具有能够提高水下作业机器人运行时的稳定性和降低了遥控延迟的优点,但是在使用的过程中,由于水低河床的结构复杂,对比案例中的水下机器人缺少防碰撞装置,使得水下机器人在水底移动的过程中容易与水底发生碰撞,从而容易提高了水下机器人的故障率,进而降低了水下机器人的使用效果。
4、综上,因此本实用新型提供了一种水下作业机器人,以解决上述问题。
技术实现思路
1、为了解决上述技术问题,本实用新型提供了如下的技术方案:
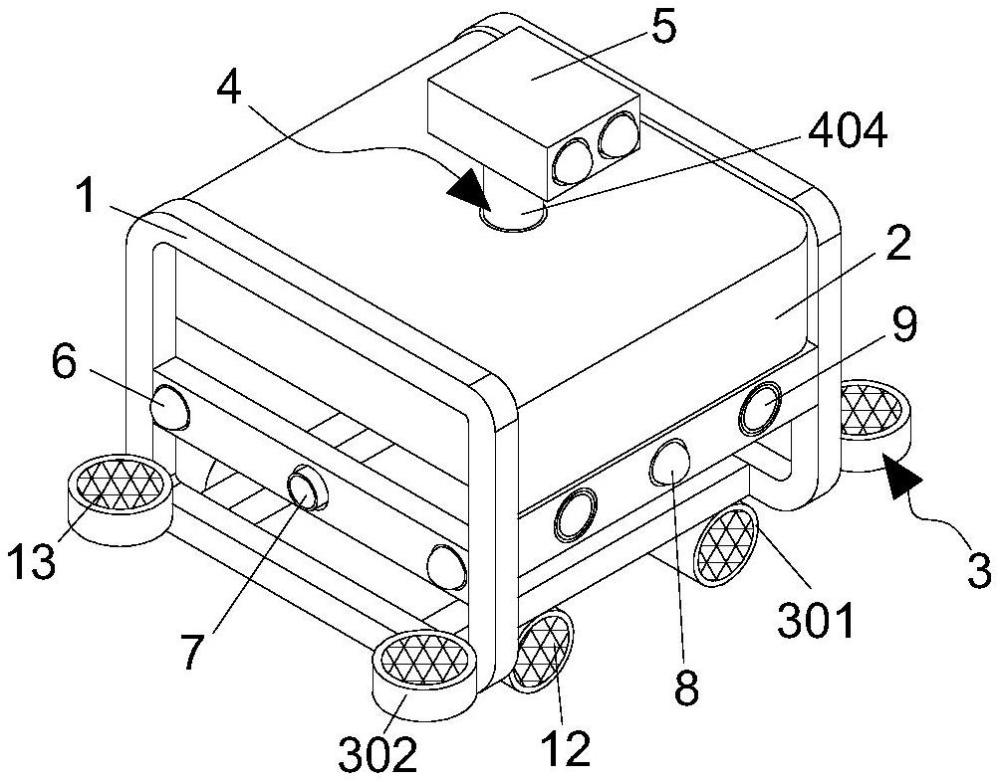
2、一种水下作业机器人,包括防护框,所述防护框内腔的上端固定连接有水下机器人本体,所述防护框的底部设置有动力单元,所述水下机器人本体的内腔设置有调节单元,所述水下机器人本体的顶部设置有第一水下摄像头,所述防护框两侧的前端和后端均固定连接有第一测距传感器,所述防护框两侧的中心处均固定连接有第二水下摄像头,所述防护框正面的中心处固定连接有第二测距传感器,所述防护框正面的两侧均固定连接有水下探照灯,所述水下机器人本体的内壁固定连接有plc控制器,所述第一水下摄像头、第一测距传感器、第二水下摄像头、第二测距传感器和外设控制终端的输出端均与plc控制器的输入端电性连接,所述plc控制器的输出端分别与动力单元、水下探照灯和外设控制终端的输入端电性连接。
3、优选的,所述动力单元还包括推进器本体,所述防护框两侧的前端和后端均固定连接有升降涡轮,所述升降涡轮的内腔设置有螺旋桨叶。
4、优选的,所述调节单元还包括伺服电机,所述伺服电机的输出轴传动连接有主动齿轮,所述主动齿轮的表面啮合有从动齿轮,所述从动齿轮的顶部固定连接有传动杆,所述传动杆远离从动齿轮的一端贯穿至水下机器人本体的外部并与第一水下摄像头固定连接,所述plc控制器的输出端与伺服电机的输入端电性连接。
5、优选的,所述从动齿轮的底部固定连接有支撑杆,所述支撑杆远离从动齿轮的一端通过轴承与水下机器人本体的内壁活动连接。
6、优选的,所述推进器本体的前端和后端均固定连接有第一防护网,所述升降涡轮的顶部和底部均固定连接有第二防护网。
7、优选的,所述推进器本体的数量为两个,且两个所述推进器本体均与防护框的底部固定连接。
8、与现有技术相比,本实用新型具有如下有益效果:
9、1、本实用新型通过设置第一测距传感器、第二水下摄像头、第二测距传感器和plc控制器,起到了能够对水下机器人本体的行径路线进行探测的效果,第一测距传感器和第二测距传感器发出的超声波能够对周围的环境进行探测,从而能够防止水下机器人本体与河床发生碰撞,第二水下摄像头用于对水下机器人本体两侧的环境进行录像,第一测距传感器、第二水下摄像头和第二测距传感器将探测结果和拍摄画面发送至plc控制器,plc控制器将探测结果和拍摄画面发送至外设终端,从而能够方便操作人员了解水下机器人本体的行径路线的路况,能够及时调整水下机器人本体的行径路线,进而能够有效的防止水下机器人本体在水下发生碰撞的情况。
10、2、本实用新型通过设置防护框,起到了能够对水下机器人本体进行防护的效果,防护框能够在水下机器人本体发生碰撞时对水下机器人本体进行防护,有效的防止水下机器人本体直接与河床发生碰撞造成损坏的情况发生,进而能够有效的降低了水下机器人本体使用时的故障率。
技术特征:
1.一种水下作业机器人,包括防护框(1),其特征在于:所述防护框(1)内腔的上端固定连接有水下机器人本体(2),所述防护框(1)的底部设置有动力单元(3),所述水下机器人本体(2)的内腔设置有调节单元(4),所述水下机器人本体(2)的顶部设置有第一水下摄像头(5),所述防护框(1)两侧的前端和后端均固定连接有第一测距传感器(6),所述防护框(1)两侧的中心处均固定连接有第二水下摄像头(7),所述防护框(1)正面的中心处固定连接有第二测距传感器(8),所述防护框(1)正面的两侧均固定连接有水下探照灯(9),所述水下机器人本体(2)的内壁固定连接有plc控制器(10),所述第一水下摄像头(5)、第一测距传感器(6)、第二水下摄像头(7)、第二测距传感器(8)和外设控制终端的输出端均与plc控制器(10)的输入端电性连接,所述plc控制器(10)的输出端分别与动力单元(3)、水下探照灯(9)和外设控制终端的输入端电性连接。
2.如权利要求1所述水下作业机器人,其特征在于:所述动力单元(3)还包括推进器本体(301),所述防护框(1)两侧的前端和后端均固定连接有升降涡轮(302),所述升降涡轮(302)的内腔设置有螺旋桨叶(303)。
3.如权利要求1所述水下作业机器人,其特征在于:所述调节单元(4)还包括伺服电机(401),所述伺服电机(401)的输出轴传动连接有主动齿轮(402),所述主动齿轮(402)的表面啮合有从动齿轮(403),所述从动齿轮(403)的顶部固定连接有传动杆(404),所述传动杆(404)远离从动齿轮(403)的一端贯穿至水下机器人本体(2)的外部并与第一水下摄像头(5)固定连接,所述plc控制器(10)的输出端与伺服电机(401)的输入端电性连接。
4.如权利要求3所述水下作业机器人,其特征在于:所述从动齿轮(403)的底部固定连接有支撑杆(11),所述支撑杆(11)远离从动齿轮(403)的一端通过轴承与水下机器人本体(2)的内壁活动连接。
5.如权利要求2所述水下作业机器人,其特征在于:所述推进器本体(301)的前端和后端均固定连接有第一防护网(12),所述升降涡轮(302)的顶部和底部均固定连接有第二防护网(13)。
6.如权利要求2所述水下作业机器人,其特征在于:所述推进器本体(301)的数量为两个,且两个所述推进器本体(301)均与防护框(1)的底部固定连接。
技术总结
本技术提供一种水下作业机器人,属于水下机器人领域,包括防护框,所述防护框内腔的上端固定连接有水下机器人本体,所述防护框的底部设置有动力单元,所述水下机器人本体的内腔设置有调节单元,所述水下机器人本体的顶部设置有第一水下摄像头,所述防护框两侧的前端和后端均固定连接有第一测距传感器;本技术通过设置第一测距传感器、第二水下摄像头、第二测距传感器和PLC控制器,起到了能够对水下机器人本体的行径路线进行探测的效果,从而能够方便操作人员了解水下机器人本体的行径路线的路况,能够及时调整水下机器人本体的行径路线,进而能够有效的防止水下机器人本体在水下发生碰撞的情况。
技术研发人员:舒家勇
受保护的技术使用者:中戎志胜(北京)科技有限公司
技术研发日:20230808
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!