测量无人船的制作方法
本技术涉及水面航行器,具体涉及一种测量无人船。
背景技术:
1、水下地形测量是掌握水下地理信息的重要手段,其难度要远高于陆地数据采集。由于,无人船具有机动灵活、安全性高的特点,目前,无人船已经成为了水下地形测量的重要工具。
2、相关技术中往往会使用搭载有多波束测深仪的无人船测量水下地形。为保证测量精确性,多波束测深仪通常被固定安装在船底下方,且距离船底几十公分,以此避免无人船行进时产生的气泡和湍流造成干扰。这种结构导致无人船运输及准备作业时底端的多波束测深仪容易损坏。
技术实现思路
1、本实用新型的目的在于提供一种测量无人船,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种测量无人船,包括控制器、船体和测量装置,所述测量装置包括升降机构和多波束测深仪,所述控制器设置于所述船体内部,所述测量装置安装在所述船体上,所述升降机构与所述多波束测深仪固定连接,并适于带动所述多波束测深仪下降到低于所述船体底部的位置或上升到高于所述船体底部的位置,所述控制器适于控制所述船体和所述升降机构。
4、优选的,所述升降机构包括传动组件、从动组件、第一法兰盘、第二法兰盘和第三法兰盘,第一法兰盘与第三法兰盘适于安装所述传动组件,第二法兰盘固定在船体表面,第一法兰盘和第三法兰盘中的至少一者通过壳体与第二法兰盘固定连接,所述传动组件和所述多波束测深仪分别与所述从动组件连接。
5、优选的,所述传动组件由伺服电机、联轴器、滚珠丝杆、支撑座组成,所述滚珠丝杆一端与伺服电机连接,另一端与所述支撑座连接,所述滚珠丝杆适于在所述支撑座内转动,所述支撑座设于所述第三法兰盘内部,所述伺服电机固定在所述第一法兰盘顶部,所述滚珠丝杆与所述伺服电机连接处设有联轴器。
6、优选的,所述从动组件由滑块和连接杆组成,所述滑块设置在所述滚珠丝杆上,所述滑块适于沿所述滚珠丝杆的轴线方向直线运动,所述滑块通过连接杆与所述多波束测深仪固定连接,所述连接杆穿过所述第三法兰盘。
7、优选的,所述传动组件还包括导向轴,所述导向轴穿过所述滑块,且所述导向轴一端固定在所述第一法兰盘上,另一端固定在所述第三法兰盘上。
8、优选的,所述传动组件包括两根导向轴,所述从动组件包括四根连接杆,四根连接杆对称设置,且位于所述滚珠丝杆外侧。
9、优选的,所述测量装置还包括多波束保护罩,所述多波束保护罩固定在所述第三法兰盘底部,适于容纳所述多波束测深仪,且所述多波束保护罩底部与所述船体底部平齐。
10、优选的,所述多波束保护罩底部到所述第二法兰盘的距离等于所述船体的高度。
11、优选的,所述控制器与所述伺服电机电连接,所述控制器适于控制所述伺服电机,以控制所述滚珠丝杆转动。
12、优选的,所述第一法兰盘顶部设有电机保护罩。
13、与现有技术相比,本申请的技术方案具有以下有益技术效果:
14、本实用新型提供一种测量无人船,将升降机构与多波束测深仪连接,可以在测量时降低多波束测深仪的高度,使多波束测深仪移动至船体下方,同时,在测量结束后升高多波束测深仪的高度,使多波束测深仪回到高于船体底部的位置,不同于将多波束测深仪固定在船体下方几十公分处的结构,能够在一定程度上保护多波束测深仪,避免多波束测深仪在运输及准备过程中被损坏。
15、本实用新型的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本实用新型而了解。本实用新型的目的和其他优点可通过在说明书、权利要求书以及附图中所指出的结构来实现和获得。
技术特征:
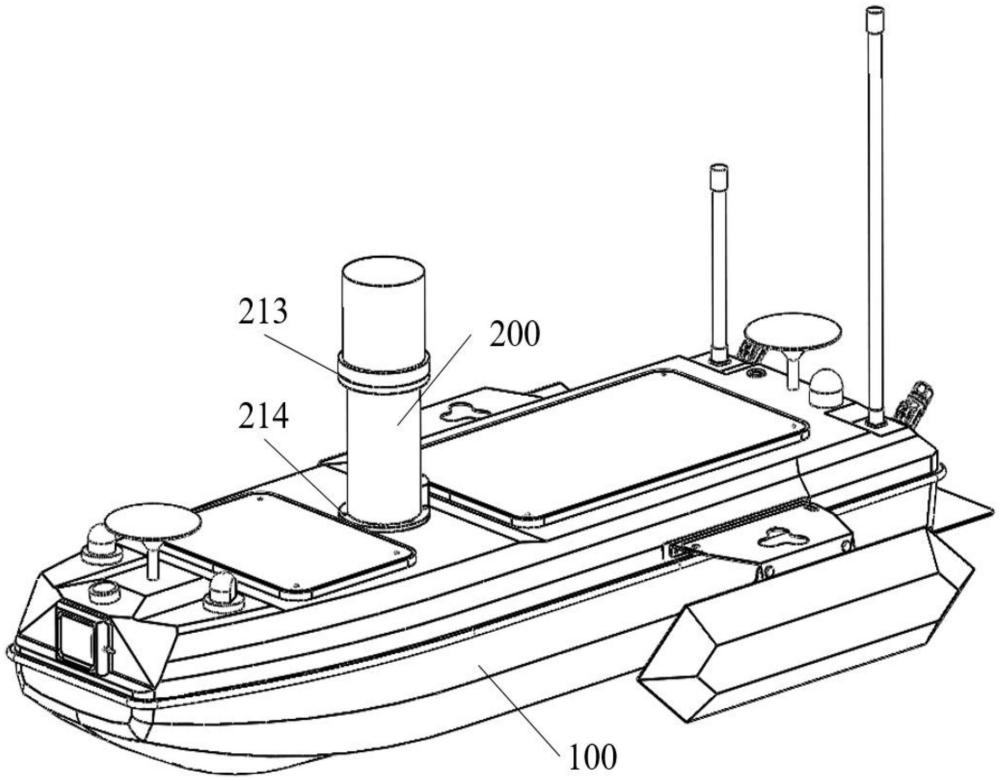
1.一种测量无人船,其特征在于,包括控制器、船体(100)和测量装置(200),所述测量装置(200)包括升降机构(210)和多波束测深仪(220),所述控制器设置于所述船体(100)内部,所述测量装置(200)安装在所述船体(100)上,所述升降机构(210)与所述多波束测深仪(220)固定连接,并适于带动所述多波束测深仪(220)下降到低于所述船体(100)底部的位置或上升到高于所述船体(100)底部的位置,所述控制器适于控制所述船体(100)和所述升降机构(210)。
2.根据权利要求1所述的测量无人船,其特征在于,所述升降机构(210)包括传动组件(211)、从动组件(212)、第一法兰盘(213)、第二法兰盘(214)和第三法兰盘(215),第一法兰盘(213)与第三法兰盘(215)适于安装所述传动组件(211),第二法兰盘(214)固定在船体(100)表面,第一法兰盘(213)和第三法兰盘(215)中的至少一者通过壳体(230)与第二法兰盘(214)固定连接,所述传动组件(211)和所述多波束测深仪(220)分别与所述从动组件(212)连接。
3.根据权利要求2所述的测量无人船,其特征在于,所述传动组件(211)由伺服电机(2111)、联轴器(2112)、滚珠丝杆(2113)、支撑座组成,所述滚珠丝杆(2113)一端与伺服电机(2111)连接,另一端与所述支撑座连接,所述滚珠丝杆(2113)适于在所述支撑座内转动,所述支撑座设于所述第三法兰盘(215)内部,所述伺服电机(2111)固定在所述第一法兰盘(213)顶部,所述滚珠丝杆(2113)与所述伺服电机(2111)连接处设有联轴器(2112)。
4.根据权利要求3所述的测量无人船,其特征在于,所述从动组件(212)由滑块(2121)和连接杆(2122)组成,所述滑块(2121)设置在所述滚珠丝杆(2113)上,所述滑块(2121)适于沿所述滚珠丝杆(2113)的轴线方向直线运动,所述滑块(2121)通过连接杆(2122)与所述多波束测深仪(220)固定连接,所述连接杆(2122)穿过所述第三法兰盘(215)。
5.根据权利要求4所述的测量无人船,其特征在于,所述传动组件(211)还包括导向轴(2114),所述导向轴(2114)穿过所述滑块(2121),且所述导向轴(2114)一端固定在所述第一法兰盘(213)上,另一端固定在所述第三法兰盘(215)上。
6.根据权利要求5所述的测量无人船,其特征在于,所述传动组件(211)包括两根导向轴(2114),所述从动组件(212)包括四根连接杆(2122),四根连接杆(2122)对称设置,且位于所述滚珠丝杆(2113)外侧。
7.根据权利要求2-5任一项所述的测量无人船,其特征在于,所述测量装置(200)还包括多波束保护罩(240),所述多波束保护罩(240)固定在所述第三法兰盘(215)底部,适于容纳所述多波束测深仪(220),且所述多波束保护罩(240)底部与所述船体(100)底部平齐。
8.根据权利要求7所述的测量无人船,其特征在于,所述多波束保护罩(240)底部到所述第二法兰盘(214)的距离等于所述船体(100)的高度。
9.根据权利要求3所述的测量无人船,其特征在于,所述控制器与所述伺服电机(2111)电连接,所述控制器适于控制所述伺服电机(2111),以控制所述滚珠丝杆(2113)转动。
10.根据权利要求3所述的测量无人船,其特征在于,所述第一法兰盘(213)顶部设有电机保护罩(250)。
技术总结
本技术涉及一种测量无人船,其技术要点是包括控制器、船体和测量装置,所述测量装置包括升降机构和多波束测深仪,控制器设置于船体内部,测量装置安装在船体上,升降机构与多波束测深仪固定连接,并适于带动多波束测深仪下降到低于船体底部的位置或上升到高于船体底部的位置,控制器适于控制船体和升降机构。本技术涉及的测量无人船将升降机构与多波束测深仪连接,可以在测量时降低多波束测深仪的高度,使多波束测深仪移动至船体下方,同时,在测量结束后升高多波束测深仪的高度,使多波束测深仪回到高于船体底部的位置,能够在一定程度上保护多波束测深仪,避免多波束测深仪被损坏。
技术研发人员:方祯
受保护的技术使用者:行星轮(武汉)科技有限公司
技术研发日:20230811
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!