一种推力在轨标定试验方法与流程
[0001]
本发明涉及一种推力在轨标定试验方法,属于航天器电推进技术领域。
背景技术:
[0002]
随着航天技术的发展,现代小卫星逐渐呈现出轻量化、小型化、低成本以及高功能密度和性价比等优势,纳星已成为空间系统的重要组成部分。目前纳星已经具备姿态控制能力,但能进入工程应用的轨道控制微推进系统甚少,多处于研制或飞行试验阶段。微推力器的推力性能至关重要。但由于地面试验环境和空间环境的差异性,微推力器的推力必须进行在轨标定试验。然而现有的在轨标定试验方法大都比较繁琐,且偏差较大,从而导致微推力器对轨道的控制精度较低。
技术实现要素:
[0003]
本发明提供了一种推力在轨标定试验方法,能够解决现有的在轨标定试验方法比较繁琐,且偏差较大,从而导致微推力器对轨道的控制精度较低的问题。
[0004]
本发明提供了一种推力在轨标定试验方法,用于卫星轨控微推力器,所述方法包括:在所述卫星运行圈数为第偶数圈时,向所述卫星施加推力,以获得所述卫星的无推力作用圈和有推力作用圈;根据无推力作用圈和紧邻其后的有推力作用圈的平均轨道半长轴,获得所述推力器的推力估计值范围;在每个推力施加时段内,根据轨道动力学模型获得符合所述推力估计值范围的所有采样点的预测位置;根据每个推力施加时段内所有采样点的预测位置和实测位置,获得每个推力施加时段内的推力最优估计值;并根据所述推力最优估计值获得所述推力器的推力标定信息。
[0005]
可选的,所述根据无推力作用圈和紧邻其后的有推力作用圈的平均轨道半长轴,获得所述推力器的推力估计值范围包括:利用卫星的位置矢量实测数据和速度矢量实测数据,获得无推力作用圈和紧邻其后的有推力作用圈的平均轨道半长轴和两者的平均轨道半长轴差值;根据无推力作用圈和紧邻其后的有推力作用圈的平均轨道半长轴差值,获得每个有推力作用圈的推力估计值;根据每个有推力作用圈的推力估计值获得推力器的推力估计值范围。
[0006]
可选的,根据第一公式计算卫星运行过程中每圈的平均轨道半长轴;所述第一公式为:其中,m为卫星运行过程中采样点数量;a
m
为卫星运行轨道中采样点处的瞬时轨道半长轴;根据第二公式获得瞬时轨道半长轴a
m
;所述第二公式为:其中,其中,其中,μ为地球引力常数;为j2000.0惯性坐标系下采样点的位置矢量和速度矢量;根据第三公式获得无推力作用圈和紧邻其后的有推力作用圈的平均轨道半长轴差值;所述第三公式为:其中,n=1,2,
…
,n/2;n为卫星运行总圈数;为有推力作用
圈的平均轨道半长轴;为无推力作用圈的平均轨道半长轴。
[0007]
可选的,所述根据无推力作用圈和紧邻其后的有推力作用圈的平均轨道半长轴差值,获得每个有推力作用圈的推力估计值包括:根据第四公式获得每个有推力作用圈的推力估计值;所述第四公式为:其中,μ为地球引力常数;为无推力作用圈的平均轨道半长轴;(n=1,2,...,n/2)为无推力作用圈和紧邻其后的有推力作用圈的平均轨道半长轴差值;为每次推力开始作用时刻的卫星速度;δt
n
(n=1,2,...,n/2)为每次推力作用时间;为有推力作用圈的推力估计值。
[0008]
可选的,所述根据每个有推力作用圈的推力估计值获得推力器的推力估计值范围包括:根据第五公式获得推力器的推力估计值;所述第五公式为:其中,为有推力作用圈的推力估计值;n为卫星运行总圈数;为推力器的推力估计值;根据第六公式获得推力器的推力估计值标准偏差;所述第六公式为:其中,s
thruster
为推力估计值标准偏差;所述推力器的推力估计值范围为
[0009]
可选的,所述轨道动力学模型为:其中,r为地心到卫星的位置矢量;为卫星的加速度矢量;a
e
为地球非球形引力摄动加速度;a
a
为大气阻力加速度;a
s
为第三体引力加速度;a
l
为太阳光压加速度;a
t
为推力器推力加速度。
[0010]
可选的,所述根据每个推力施加时段内所有采样点的预测位置和实测位置,获得每个推力施加时段内的推力最优估计值包括:获得目标函数值最小时对应的推力估计值,并将所述推力估计值作为每个推力施加时段内的推力最优估计值;其中,所述目标函数为:j=∑[(x
pred-x
gnss
)2+(y
pred-y
gnss
)2+(z
pred-z
gnss
)2];式中,(x
pred
,y
pred
,z
pred
)为采样点的预测位置矢量;(x
gnss
,y
gnss
,z
gnss
)为采样点的实测位置矢量。
[0011]
可选的,所述根据所述推力最优估计值获得所述推力器的推力标定信息包括:根据第七公式获得所述推力器的推力标定值;根据第八公式获得所述推力标定值的标准偏差;所述第七公式为:所述第八公式为:
其中,为推力器的推力标定值;为有推力作用圈的推力最优估计值;为推力器推力标定值的标准偏差;所述推力器的推力标定值范围为
[0012]
可选的,所述推力矢量沿所述卫星速度矢量方向,且通过所述卫星质心。
[0013]
可选的,所述推力施加的弧长范围控制在真近点角在近地点的
±
α范围内。
[0014]
本发明能产生的有益效果包括:
[0015]
本发明提供的推力在轨标定试验方法,首先根据相邻的无推力作用和有推力作用的每两个轨道周期内平均轨道半长轴差值,获得一系列推力估计值及其均值和标准差;接着针对每个推力施加时段,在推力估计值范围内,根据轨道动力学模型预测每个估计值下的卫星位置;最后当施加时段内所有采样点预测位置和实测位置的平方差之和最小时为该时段的推力最优估计值,所有最优估计值的均值即为推力器的推力标定值。本发明通过结合卫星位置预测,利用卫星轨道变化情况反算推力,该方法能够简单且有效的获得到推力器的推力标定值、标准偏差和推力标定值范围等信息,从而提高了微推力器对轨道的控制精度。
附图说明
[0016]
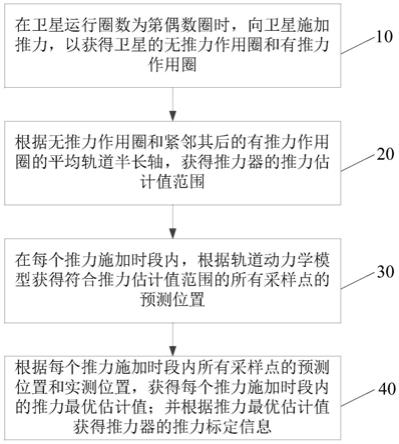
图1为本发明实施例提供的推力在轨标定试验方法流程图;
[0017]
图2为本发明实施例提供的推力施加弧长示意图;
[0018]
图3为本发明实施例提供的推力在轨标定试验方法的思路示意图。
具体实施方式
[0019]
下面结合实施例详述本发明,但本发明并不局限于这些实施例。
[0020]
纳星具有轨道控制能力,可以实现隐蔽抵近和监测等重要空间任务。下面所述的卫星可以是纳星,也可以是其它卫星,本发明实施例对此不做限定。为了便于描述,本发明以纳星为例描述具体的推力在轨标定试验方法。但是鉴于纳星的体积和功率限制,微推力器的推力一般较小,安装时,推力矢量必须通过纳星质心,工作时,推力矢量方向沿纳星速度方向。
[0021]
在推力矢量方向沿纳星速度方向的基础上,为了能够产生明显的轨道变化以及便于反算推力,本发明实施例提供了一种推力在轨标定试验方法,用于卫星轨控微推力器,如图1所示,所述方法包括:
[0022]
步骤10、在卫星运行圈数为第偶数圈时,向卫星施加推力,以获得卫星的无推力作用圈和有推力作用圈。
[0023]
推力施加的圈数应每次间隔一圈无推力作用的轨道周期,假设整个推力标定试验中,卫星共运行n(为偶数)圈,当卫星运行圈数n
s
为n
s
=2m-1(m=1,...,n/2)时,推力不施加,当卫星运行圈数n
s
为n
s
=2n(n=1,2,...,n/2)时,推力在弧长范围内沿速度矢量方向施加。
[0024]
推力施加的弧长范围控制在当真近点角f在近地点的
±
α范围内,如图2所示,α的
大小根据微推力器每轨可以工作的时长δt
thruster
决定。
[0025]
假设推力在轨标定试验起始时刻和结束时刻分别为t1和t
n/2+1
,该时刻可以选择在图2中a点。整个试验过程中,卫星共运行n圈(n为偶数)。当卫星运行圈数n
s
为n
s
=2n-1(n=1,2,...,n/2)时,推力不施加,卫星经过a的时刻为t
i
(i=1,2,...,n/2),当卫星运行圈数n
s
为n
s
=2n(n=1,2,...,n/2)时,推力施加时间为[t
aj
,t
bj
](j=1,2,...,n/2)。
[0026]
步骤20、根据无推力作用圈和紧邻其后的有推力作用圈的平均轨道半长轴,获得推力器的推力估计值范围。
[0027]
具体的,可以包括:
[0028]
步骤201、利用卫星的位置矢量实测数据和速度矢量实测数据,获得无推力作用圈和紧邻其后的有推力作用圈的平均轨道半长轴和两者的平均轨道半长轴差值。
[0029]
在无推力作用圈数n
s
为n
s
=2n-1(n=1,...,n/2)时,每圈的起始时间为t
i
(i=1,2,...,n/2),结束时间为t
aj
(j=1,2,...,n/2)。针对每个无推力作用圈,将位置矢量和速度矢量测量数据转换为j2000.0惯性坐标系下的位置矢量和速度矢量根据该位置矢量和速度矢量可以获得相应的瞬时轨道半长轴a
m
:
[0030]
根据第二公式获得瞬时轨道半长轴a
m
;
[0031]
所述第二公式为:其中,其中,μ为地球引力常数;为j2000.0惯性坐标系下采样点的位置矢量和速度矢量;
[0032]
假设每圈获得的矢量测量数据和速度矢量测量数据数量均为m,即每圈的采样点数量为m,则可以获得m个瞬时轨道半长轴a
m
(m=1,2,...,m),则每个无推力作用圈开始时刻到结束时刻的平均轨道半长轴为同理,在有推力作用圈数n
s
为n
s
=2n(n=1,2,...,n/2)时,每圈的起始时间为t
aj
(j=1,2,...,n/2),结束时间为t
i
(i=2,...,n/2),每个无推力作用圈开始时刻到结束时刻的平均轨道半长轴为n=1,2,...,n/2。
[0033]
可以根据第一公式计算卫星运行过程中每圈的平均轨道半长轴;
[0034]
所述第一公式为:
[0035]
其中,m为卫星运行过程中采样点数量;a
m
为卫星运行轨道中采样点处的瞬时轨道半长轴。
[0036]
最终,可以根据第三公式获得无推力作用圈和紧邻其后的有推力作用圈的平均轨道半长轴差值;
[0037]
所述第三公式为:
[0038]
其中,n=1,2,
…
,n/2;n为卫星运行总圈数;为有推力作用圈的平均轨道半长轴;为无推力作用圈的平均轨道半长轴。
[0039]
步骤202、根据无推力作用圈和紧邻其后的有推力作用圈的平均轨道半长轴差值,获得每个有推力作用圈的推力估计值。
[0040]
如果微小推力施加方向始终沿轨道切向,假设微小推力f对卫星的加速度为a
t
,作用时间为δt,则根据摄动方程可得微小推力对轨道要素的运动方程为
[0041][0042]
式中,a为轨道半长轴,e为偏心率,f为真近点角,ω为近地点幅角,m为平近地点角,μ为地球引力常数。
[0043]
施加切向推力后,轨道半长轴变化δa与总的速度增量δv之间存在一定关系,假设不考虑大气阻力等摄动的影响。设轨道切向速度为v,根据椭圆轨道速度特性可知式中,p=a(1-e2)为半焦距。
[0044]
由和可得
[0045][0046]
最终得到
[0047]
假设卫星在推力作用下,由初始轨道半长轴a0变为a0+δa,推力施加时刻的速度为v0,推力结束时刻的速度为v0+δv。对上式两端积分可得轨道
半长轴变化δa与总的速度增量δv之间的关系为
[0048]
同时,fδt=mδv,其中m为卫星质量,在推力施加过程中可以认为不变,则不考虑摄动因素条件下,轨道半长轴变化δa与推力f的关系为:利用该式估算每个推力作用圈的推力值时,a0取得是有推力作用前一圈(即无推力作用圈)的平均轨道半长轴,δa为相邻无推力作用和有推力作用两圈的平均轨道半长轴之差,v0取得是推力开始作用时刻的卫星速度。
[0049]
根据每个无推力作用圈的平均轨道半长轴相邻无推力作用和有推力作用两圈的平均轨道半长轴之差每次推力开始作用时刻的卫星速度以及每次推力作用时间δt
n
(n=1,2,...,n/2),利用轨道半长轴变化δa与推力f的关系式可以获得所有推力作用圈的推力估计值
[0050]
具体的,可以根据第四公式获得每个有推力作用圈的推力估计值;
[0051]
所述第四公式为:
[0052]
其中,μ为地球引力常数;为无推力作用圈的平均轨道半长轴;为无推力作用圈和紧邻其后的有推力作用圈的平均轨道半长轴差值;为每次推力开始作用时刻的卫星速度;δt
n
(n=1,2,...,n/2)为每次推力作用时间;为有推力作用圈的推力估计值。
[0053]
步骤203、根据每个有推力作用圈的推力估计值获得推力器的推力估计值范围。
[0054]
可以根据第五公式获得推力器的推力估计值;
[0055]
所述第五公式为:
[0056]
其中,为有推力作用圈的推力估计值;n为卫星运行总圈数;为推力器的推力估计值;
[0057]
可以根据第六公式获得推力器的推力估计值标准偏差;
[0058]
所述第六公式为:
[0059]
其中,s
thruster
为推力估计值标准偏差;
[0060]
则推力器的推力估计值范围为
[0061]
步骤30、在每个推力施加时段内,根据轨道动力学模型获得符合推力估计值范围的所有采样点的预测位置。
[0062]
上述获得的推力估计值范围没有考虑实际摄动的影响,并不精确。但是实测得到的轨道信息是在各种摄动和推力器推力工作作用下的实际数据。因此,考虑建立包含各种摄动的卫星轨道动力学模型,在每个推力施加时间段[t
aj
,t
bj
](j=1,2,...,n/2)内,基于推力估计值范围预测卫星轨道信息。
[0063]
所述轨道动力学模型采用位置速度作为自变量的微分方程;
[0064]
所述轨道动力学模型为:
[0065]
其中,r为地心到卫星的位置矢量;为卫星的加速度矢量;a
e
为地球非球形引力摄动加速度;a
a
为大气阻力加速度;a
s
为第三体引力加速度;a
l
为太阳光压加速度;a
t
为推力器推力加速度。
[0066]
根据该轨道动力学模型可以计算得到每个采样点的预测位置r。
[0067]
步骤40、根据每个推力施加时段内所有采样点的预测位置和实测位置,获得每个推力施加时段内的推力最优估计值;并根据推力最优估计值获得推力器的推力标定信息。
[0068]
从每个t
aj
时刻开始,以该时刻实测的位置和速度为初值,对轨道动力学模型进行积分,直至t
bj
时刻。将每个推力工作时间段[t
aj
,t
bj
](j=1,2,...,n/2)的位置预测信息与位置实测信息对比,当目标函数值最小时对应的推力即为每个推力施加时段内有推力作用圈的推力最优估计值其中,所述目标函数为:j=∑[(x
pred-x
gnss
)2+(y
pred-y
gnss
)2+(z
pred-z
gnss
)2];
[0069]
式中,(x
pred
,y
pred
,z
pred
)为采样点的预测位置矢量;(x
gnss
,y
gnss
,z
gnss
)为采样点的实测位置矢量。
[0070]
所有最优估计值的均值即为推力器的推力标定值;具体的,可以根据第七公式获得推力器的推力标定值;根据第八公式获得所述推力标定值的标准偏差;
[0071]
所述第七公式为:
[0072]
所述第八公式为:
[0073]
其中,为推力器的推力标定值;为有推力作用圈的推力最优估计值;为推力器推力标定值的标准偏差;
[0074]
则推力器的推力标定值范围为
[0075]
本发明提供的推力在轨标定试验方法,首先根据相邻的无推力作用和有推力作用的每两个轨道周期内平均轨道半长轴差值,获得一系列推力估计值及其均值和标准差;接着针对每个推力施加时段,在推力估计值范围内,根据轨道动力学模型预测每个估计值下的卫星位置;最后当施加时段内所有采样点预测位置和实测位置的平方差之和最小时为该时段的推力最优估计值,所有最优估计值的均值即为推力器的推力标定值。本发明通过结合卫星位置预测,利用卫星轨道变化情况反算推力,该方法能够简单且有效的获得到推力器的推力标定值、标准偏差和推力标定值范围等信息,从而提高了微推力器对轨道的控制精度。
[0076]
以上所述,仅是本申请的几个实施例,并非对本申请做任何形式的限制,虽然本申请以较佳实施例揭示如上,然而并非用以限制本申请,任何熟悉本专业的技术人员,在不脱离本申请技术方案的范围内,利用上述揭示的技术内容做出些许的变动或修饰均等同于等效实施案例,均属于技术方案范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1