一种基于无人机与无人车的农用喷药系统
1.本发明涉及农业装备技术领域,特别是涉及一种基于无人机与无人车的农用喷药系统。
背景技术:
2.由于无人机喷药作业方式具有高效、不损伤作物的特性,并随着无人机技术发展,尤其是其飞行稳定性、自主性及电源续航能力增加,使其替代了传统的人工喷药作为方式,成为喷药作业方式的主要方式。
3.现有的喷药无人机可携带的药液箱较小,在执行大规模喷药作业时,需要频繁飞回补充药液,不仅增加了无人机的往返空跑时间影响作业效率,且影响了无人机的续航。
技术实现要素:
4.发明目的:为了克服现有技术中存在的不足,本发明提供一种可及时为无人机的药液箱补充药液减少无人机空跑时间、提升作业效率的基于无人机与无人车的农用喷药系统。
5.技术方案:为实现上述目的,本发明的基于无人机与无人车的农用喷药系统,其包括喷药无人机与移动补给无人车;
6.所述喷药无人机包括无人机本体、喷药装置及药液箱;所述药液箱上具备第一对接单元;
7.所述移动补给无人车包括移动底盘、药舱以及辅助对接机构,所述药舱上安装有第二对接单元;
8.所述辅助对接机构用于使所述第一对接单元与所述第二对接单元进行对接。
9.进一步地,所述辅助对接机构包括抓取部与升降部,所述抓取部包括多个呈圆周阵列排布的抓取手爪,所有所述抓取手爪能够同步运动;所述升降部用于驱动所述抓取部作升降运动。
10.进一步地,所述药液箱为中间粗两端细的结构,所述抓取手爪的内侧具备v形槽。
11.进一步地,所述抓取部还包括手爪座、升降环与第一推杆;各所述抓取手爪均转动安装在所述手爪座上;所述升降环能够相对于所述手爪座升降,其升降运动由所述第一推杆驱动实现;每个所述抓取手爪与所述升降环之间均设置有过渡杆,所述过渡杆与所述抓取手爪及所述升降环之间均为铰接关系。
12.进一步地,所述升降部包括第二推杆,所述第二推杆与所述手爪座驱动连接以驱动所述手爪座相对于所述药舱升降。
13.进一步地,所述v形槽的两个表面上均转动安装有若干滚珠。
14.进一步地,所述第一对接单元包括第一对接座,所述第一对接座内具备第一阶梯孔,且第一阶梯孔由两个孔段构成,其中直径较小的孔段将所述第一对接座的端面贯通,直径较大的孔段的孔壁上设有与所述药液箱内部连通的入液孔;所述第一阶梯孔内滑动安装
有第一阶梯塞,所述第一阶梯塞由两个轴段构成,其中较细的轴段的直径小于直径较小的孔段的直径,较粗的轴段的直径等于直径较大的孔段的直径;所述第一阶梯塞与所述第一阶梯孔的底部之间设置有第一压簧;
15.所述出液接口包括第二对接座,所述第二对接座内具备第二阶梯孔,且第二阶梯孔由两个孔段构成,其中直径较小的孔段将所述第二对接座的端面贯通,直径较大的孔段的孔壁上设有与所述药舱内部连通的出液孔;所述第二阶梯孔内滑动安装有第二阶梯塞,所述第二阶梯塞由两个轴段构成,其中较细的轴段的直径小于直径较小的孔段的直径,较粗的轴段的直径等于直径较大的孔段的直径;所述第二阶梯塞与所述第二阶梯孔的底部之间设置有第二压簧;
16.所述第二阶梯塞上固定有伸出至所述第二对接座之外的顶杆。
17.进一步地,所述第二对接座上滑动套设有滑套,所述滑套与所述第二对接座之间设有第三压簧。
18.进一步地,所述喷药装置包括多个喷头;喷药无人机还包括疏密调节机构,所述疏密调节机构用于调节所有所述喷头的分布疏密程度。
19.有益效果:本发明的基于无人机与无人车的农用喷药系统,通过设置带有药舱的移动补给无人车,在喷药无人机作业时,移动补给无人车可跟随喷药无人机行走,喷药无人机的药液箱中药液不足时,可降落至移动补给无人车所在位置补充药液,如此可有效减少喷药无人机的往返空跑时间,大大提升作业效率。
附图说明
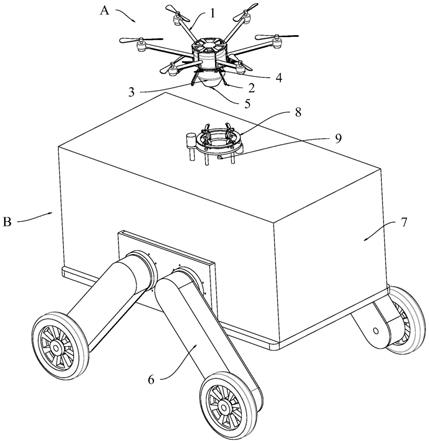
20.附图1为基于无人机与无人车的农用喷药系统的结构图;
21.附图2为辅助对接机构的结构图;
22.附图3为第一对接单元的结构图;
23.附图4为第二对接单元的结构图;
24.附图5为喷药无人机的第一状态结构图;
25.附图6为附图5中a部分的放大结构图;
26.附图7为喷药无人机的第二状态结构图;
27.附图8为附图7中b部分的放大结构图;
28.附图9为喷头的结构图;
29.附图10为无人机本体的电机部分的结构图。
30.图中:a
‑
喷药无人机;b
‑
移动补给无人车;1
‑
无人机本体;11
‑
电机;111
‑
机壳;112
‑
转子腔;113
‑
鼓风腔;114
‑
出风口;115
‑
入气口;12
‑
旋翼;13
‑
机体;14
‑
涡轮风扇;2
‑
喷药装置;21
‑
喷头;22
‑
药液入口;23
‑
气流入口;24
‑
气雾出口;25
‑
外壳;251
‑
气腔;26
‑
雾化单元;3
‑
药液箱;4
‑
疏密调节机构;41
‑
第一连杆;42
‑
第二连杆;43
‑
机构座体;44
‑
第三连杆;45
‑
第四连杆;46
‑
升降架;47
‑
升降动力元件;48
‑
第五连杆;5
‑
第一对接单元;51
‑
第一对接座;511
‑
第一阶梯孔;512
‑
入液孔;52
‑
第一阶梯塞;53
‑
第一压簧;6
‑
移动底盘;7
‑
药舱;8
‑
辅助对接机构;81
‑
抓取手爪;82
‑
手爪座;83
‑
升降环;84
‑
第一推杆;85
‑
过渡杆;86
‑
第二推杆;87
‑
滚珠;9
‑
出液接口;91
‑
第二对接座;911
‑
第二阶梯孔;912
‑
出液孔;92
‑
第二阶梯塞;93
‑
第二压簧;94
‑
顶杆;95
‑
滑套;96
‑
第三压簧。
具体实施方式
31.下面结合附图对本发明作更进一步的说明。
32.如附图1所示的基于无人机与无人车的农用喷药系统,其包括喷药无人机a与移动补给无人车b;所述喷药无人机a包括无人机本体1、喷药装置2及药液箱3;所述药液箱3上具备第一对接单元5;所述移动补给无人车b包括移动底盘6、药舱7以及辅助对接机构8,所述药舱7上安装有第二对接单元9;所述辅助对接机构8用于使所述第一对接单元5与所述第二对接单元9进行对接。
33.上述农用喷药系统中,执行喷药作业时,喷药无人机a与移动补给无人车b均由调度中心调度运行,喷药无人机a在空中执行喷药作业,调度中心根据喷药无人机a的位置调度移动补给无人车b沿着地面上可行走的路径行走至离喷药无人机a最近的位置,当喷药无人机a的药液箱中没有药液后,喷药无人机a可飞行至移动补给无人车b的位置,辅助对接机构8可辅助喷药无人机a上的第一对接单元5与移动补给无人车b上的第二对接单元9对接,如此,药舱7可将其内的药液输出给药液箱3,待药液箱3中的药液补充充足,喷药无人机a脱离移动补给无人车b并继续执行喷药作业,移动补给无人车b继续根据喷药无人机a的位置跟随行走,如此循环作业,喷药无人机a可随时补充药液,且空跑距离短,可大幅提升作业效率。当移动补给无人车b的药舱7内的药液不足时,移动补给无人车b可趁喷药无人机a执行喷药作业的间隙去补充药液。
34.具体地,如附图2所示,所述辅助对接机构8包括抓取部与升降部,所述抓取部包括多个呈圆周阵列排布的抓取手爪81,所有所述抓取手爪81能够同步运动;所述升降部用于驱动所述抓取部作升降运动。所述药液箱3为中间粗两端细的结构,所述抓取手爪81的内侧具备v形槽,v形槽的形状与药舱7的外轮廓契合,如此可方便抓取手爪81对药液箱3进行抓取定位。所述v形槽的两个表面上均转动安装有若干滚珠87,滚珠87可在抓取手爪81合拢过程中,使得药液箱3可顺滑地自适应调整姿态。
35.为了取得抓取手爪81开合,所述抓取部还包括手爪座82、升降环83与第一推杆84;各所述抓取手爪81均转动安装在所述手爪座82上;所述升降环83能够相对于所述手爪座82升降,其升降运动由所述第一推杆84驱动实现;每个所述抓取手爪81与所述升降环83之间均设置有过渡杆85,所述过渡杆85与所述抓取手爪81及所述升降环83之间均为铰接关系。
36.所述升降部包括第二推杆86,所述第二推杆86与所述手爪座82驱动连接以驱动所述手爪座82相对于所述药舱7升降。
37.通过上述结构,当喷药无人机a的药液箱3需要补充药液时,喷药无人机a飞行至辅助对接机构8的上空,并使其药液箱3置于所有抓取手爪81之间,然后,控制第一推杆84运行以使得升降环83垂直运动,使得所有抓取手爪81闭合并将药液箱3抓住定位,最后,控制第二推杆86运动,使得抓取部带着药液箱3整体下降,实现第一对接单元5与第二对接单元9的对接。
38.如附图3所示,所述第一对接单元5包括第一对接座51,所述第一对接座51内具备第一阶梯孔511,且第一阶梯孔511由两个孔段构成,其中直径较小的孔段将所述第一对接座51的端面贯通,直径较大的孔段的孔壁上设有与所述药液箱3内部连通的入液孔512;所述第一阶梯孔511内滑动安装有第一阶梯塞52,所述第一阶梯塞52由两个轴段构成,其中较细的轴段的直径小于直径较小的孔段的直径,较粗的轴段的直径等于直径较大的孔段的直
径;所述第一阶梯塞52与所述第一阶梯孔511的底部之间设置有第一压簧53;
39.如附图4所示,所述第二对接单元9包括第二对接座91,所述第二对接座91内具备第二阶梯孔911,且第二阶梯孔911由两个孔段构成,其中直径较小的孔段将所述第二对接座91的端面贯通,直径较大的孔段的孔壁上设有与所述药舱7内部连通的出液孔912,药舱7内设置有与出液孔912连接的液泵以辅助药液从药舱7向外输出;所述第二阶梯孔911内滑动安装有第二阶梯塞92,所述第二阶梯塞92由两个轴段构成,其中较细的轴段的直径小于直径较小的孔段的直径,较粗的轴段的直径等于直径较大的孔段的直径;所述第二阶梯塞92与所述第二阶梯孔911的底部之间设置有第二压簧93;所述第二阶梯塞92上固定有伸出至所述第二对接座91之外的顶杆94。此外,所述第二对接座91上滑动套设有滑套95,所述滑套95与所述第二对接座91之间设有第三压簧96。
40.通过上述结构,第一对接单元5与第二对接单元9相互靠近过程中,首先,第一对接座51的端面与滑套95的一个端面对接,以使得第一对接座51与第二对接座91内部空间之间相互连通,然后,随着第一对接座51与第二对接座91继续相互靠近,顶杆94接触到第一阶梯塞52,进而推动第一阶梯塞52与第二阶梯塞92运动,以使入液孔512与出液孔912打开,入液孔512流出的药液可进入出液孔912以对药液箱3补充药液。当第一对接单元5与第二对接单元9相互远离,入液孔512与出液孔912会自动关闭。
41.进一步地,如附图5所示,所述喷药装置2包括多个喷头21;所有喷头21呈圆周阵列排布构成喷头阵列,所述喷头21具有连接所述药液箱3的药液入口22以及连接气源的气流入口23,所述喷头21还具备气雾出口24;由所述药液入口22进入的药液以及由所述气流入口23进入的气流两者经所述喷头21处理后均由所述气雾出口24喷出。由于气流与雾化后的药液(以下简称药雾)均由同一气雾出口24喷出,因此,气流与药雾会在气雾出口24处充分混合,气流的喷射速度高,其可裹挟着药雾使得药雾可飞行至更远的位置,提升喷头21的施药距离。
42.具体地,如附图9所示,所述喷头21包括外壳25与雾化单元26,所述外壳25内具备气腔251,所述气雾出口24与所述气流入口23对置设置并分别位于所述气腔251的两侧;所述雾化单元26置于所述气腔251内,且所述雾化单元26的外壁与所述外壳25的内壁之间形成有一圈供气流通过的环形气隙;所述药液入口22置于所述雾化单元26的侧部,药液入口22内药液的流向垂直于所述气雾出口24的喷出方向,雾化单元26的药雾出口正对气雾出口24。通过上述结构,由于气雾出口24与所述气流入口23在一条线上,气流通过环形气隙后喷出速度受影响较小,且由于环形气隙围绕雾化单元26设置,气流通过环形气隙后可与雾化单元26的药雾出口出来的药雾充分混合并裹挟着药雾喷出。
43.上述雾化单元26的朝向气流入口23的一端以及背向气流入口23的一端均具有锥形结构以减少风阻,保证气流的喷出速度不受太大影响。
44.此外,由于喷头21的原理有赖于气源才能实现,若在无人机本体1上增加气源等结构会增加无人机本体1的负重,为了解决该问题,采用如下方案:所述无人机本体1为多旋翼无人机,其具备多个圆周阵列设置的电机11,每个所述电机11均具备朝上伸出的输出轴,且各电机11的输出轴上均固定有旋翼12;每个所述电机11均具备鼓风部作为为所述喷头21提供气流的气源。
45.具体地,如附图10所示,所述电机11包括机壳111,所述机壳111内具备转子腔112
以及鼓风腔113;所述转子腔112内安装有转定子组件,所述转定子组件具备伸入所述鼓风腔113内的轴端;所述鼓风部包括设置在所述鼓风腔113内的涡轮风扇14,所述涡轮风扇14固定在所述轴端上;所述鼓风腔113的侧壁设置有出风口114,所述鼓风腔113的底部设置有入气口115。
46.如此,电机11一边驱动旋翼12转动以提供无人机飞行所需的升力,一边驱动涡轮风扇14运转以提供喷头21运行所需的气流,如此,无需增设其他形式的气源即可为喷头21提供气流,可避免增加无人机本体1的负重。
47.所述喷头21的数量与所述电机11的数量相等;所有所述喷头21呈圆周阵列排布;所有所述出风口114与所有所述喷头21一一对应连接。各出风口114与对应的喷头21之间通过气管连接。
48.优选地,所有所述喷头21呈圆周阵列排布;如附图5与附图7所示,所述农用喷药无人机还包括疏密调节机构4,所述疏密调节机构4用于调节所有所述喷头21作向中心聚拢或向四周分散的运动,以改变喷头阵列的分布半径。通过调节喷头阵列的分布半径可以改变喷头组件作业的覆盖范围,以使得喷头组件可适应不同植物的喷涂需求,如:若农作物是一行一行种植的,且相邻两行农作物的间距较大,可通过疏密调节机构4使喷头阵列的分布半径变小,无人机可对农作物进行逐行喷药,减少喷药损失;若农作物是紧密成片种植的,可通过疏密调节机构4使喷头阵列的分布半径变大,如此,喷头组件的喷药范围大,可大幅提升喷药效率。
49.具体地,所述疏密调节机构4包括机构座体43,所述机构座体43上安装有与所述喷头21等数量的调节连杆;如附图6与附图8所示,所述调节连杆包括连接杆组与驱动杆组;
50.所述连接杆组包括第一连杆41与第二连杆42,所述第一连杆41的两端分别铰接在所述机构座体43以及所述第二连杆42的中部,第一连杆41与第二连杆42构成“人”字形结构;所述第二连杆42的下端安装有所述喷头21;所述第二连杆42的上端连接所述驱动杆组;
51.所述驱动杆组包括平置设置的第三连杆44,所述第三连杆44与所述机构座体43之间设置有两根第四连杆45,每根所述第四连杆45的两端均分别铰接在所述机构座体43及所述第三连杆44上;且两根所述第四连杆45两端的铰接轴所在位置构成平行四边形的四个角点。
52.通过上述结构,当第四连杆45转动,可带动连接杆组运转,以使得喷头阵列内的所有喷头21作聚拢运动或分散运动。
53.优选地,两个所述第四连杆45中,其中一个所述第四连杆45与所述机构座体43的铰接中心轴和所述第一连杆41与所述机构座体43的铰接中心轴同轴。如此,调节连杆中对应于每一个喷头21的连接杆组与驱动杆组布局紧凑,占有空间较少。
54.所述疏密调节机构4还包括动力组件,所述动力组件用于驱动所有所述驱动杆组同步运动,以驱动所有所述连接杆组运转。具体地,所述动力组件包括升降架46与升降动力元件47,所述升降动力元件47用于驱动所述升降架46作升降运动;所述升降架46上对应于每组所述驱动杆组均设置有一个第五连杆48;所述第五连杆48的两端分别铰接在所述升降架46及与其对应的所述驱动杆组的一个所述第四连杆45上。通过该结构,当升降动力元件47运转,升降架46可带动调节连杆中所有的连接杆组与驱动杆组运动。
55.无人机本体11具有置于整个所述机器人本体1中心的机体13;所述机构座体43安
装在所述机体13的下方,所述药液箱3置于所有所述连接杆组之间。
56.所述药液箱3为中间粗两边细的结构,当所有所述喷头21聚拢至最密的状态时,所述第一连杆41与第二连杆42均贴靠(不一定接触)所述药液箱3的外壁,如附图5所示。该布局方式合理,可使喷药无人机的结构紧凑,且重心降低,使得无人机的运行的稳定性。在喷药无人机a的药液箱3需要补充药液时,先控制升降动力元件47运转,使得所有喷头21的分散度达到最大,再使抓取部对药液箱3进行抓取。
57.所述升降架46置于所述机体13的上方,所述升降动力元件47的元件座体安装在所述机体13内,且所述升降动力元件47具有伸出至所述机体13之上并可相对于所述元件座体伸缩的伸缩部;所述伸缩部与所述升降架46驱动连接。
58.本发明的基于无人机与无人车的农用喷药系统,通过设置带有药舱的移动补给无人车,在喷药无人机作业时,移动补给无人车可跟随喷药无人机行走,喷药无人机的药液箱中药液不足时,可降落至移动补给无人车所在位置补充药液,如此可有效减少喷药无人机的往返空跑时间,大大提升作业效率。
59.以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1