一种机臂可折叠的旋翼无人机的制作方法
[0001]
本实用新型涉及一种无人机,具体涉及一种机臂可折叠的旋翼无人机。
背景技术:
[0002]
目前,无人机技术发展越来越快,其在航拍、监测和侦察等方面的应用越发普遍和迫切,而旋翼无人机凭借其可悬浮停靠、起降方便快捷和飞行稳定等优势受到更多开发者的关注。为了方便无人机的收纳和携带,旋翼无人机通常设计为机臂可折叠的形式,处于工作状态时机臂打开,在非工作状态时机臂收纳在机身的两侧。因此,设置在机臂与机身之间的折叠机构起着重要的作用。首先折叠机构需方便使用者折叠和收纳;其次,当机臂相对机身打开处于飞行过程中,折叠机构需确保机臂不再相对机身旋转或者晃动,提高旋翼无人机的稳定性以及安全性;而当前的可折叠旋翼无人机,因折叠机构设计不合理,存在折叠、打开过程操作复杂,或者当旋翼无人机处于工作状态时,机臂相对机身存在晃动或者受升力方向变化影响产生旋转,整个飞行过程的稳定性差且存在一定的安全隐患。
[0003]
如申请号cn201820586170.6公开了一种卡接式无人机折叠臂机构,该技术方案包括:机身伸出臂、机臂和卡扣套筒,机臂铰接至机身伸出臂,卡扣套筒套设在机臂和机身伸出臂中的一个上,卡扣套筒上设置有第一卡接部,机臂和机身伸出臂中的另一个上设置有第二卡接部,在机臂相对于机身伸出臂展开情况下,第一卡接部与第二卡接部相互卡接实现机臂的打开。该方案虽然解决了机臂的折叠和打开,但该折叠机构装配关系复杂;该折叠机构通过设置在套筒内的第一卡接部和设置在机臂或机身伸出臂上的第二卡接部配合在机臂打开时将两者锁止,防止机臂的晃动,该锁止方式对各个部件装配精度要求较高,提高了生产加工难度;且第一卡接部与第二卡接部的配合在套筒旋转不到位或者旋转过度的情况也存在止位效果差而导致机臂相对机身存在晃动的情况,难以整个飞行过程的稳定性。
[0004]
另一申请号为cn201920088902.3公开了一种可拆卸多旋翼无人机,该方案包括机身和机臂,机臂沿机身周向方向等间隔的分布在机身外侧,机臂的一端设置有螺旋桨,机臂的另一端一体成型有连接卡块,机身的外壁上固定有与连接卡块相卡合的连接卡座,连接卡块与连接卡座的对应位置设有螺纹孔,螺纹孔内插装有紧固螺栓。该方案通过连接卡块与连接卡座的卡合或分离,虽然实现了机臂的折叠和打开,但折叠与打开方式操作过程复杂,给使用者带来不便,且机臂与机身分离后为独立的部件,不易收纳保存;该方案中采用螺纹孔内插装螺栓将连接卡块与连接卡座两者固定,在无人机飞行过程中,动力承载部会对螺栓产生力矩,造成螺栓固定失效,具有一定的安全隐患。
技术实现要素:
[0005]
本实用新型所要解决的技术问题是提供一种折叠连接结构简单、锁止稳定且不受升力方向变化影响的机臂可折叠的旋翼无人机。
[0006]
本实用新型解决上述技术问题所采用的技术方案为:一种机臂可折叠的旋翼无人机,包括机身、与机身通过折叠连接结构连接的机臂、与机臂连接为机身提供升力的动力承
载部,所述机臂相对机身具有处于折叠的第一状态和处于打开的第二状态,其特征在于:所述折叠连接结构包括相互配合连接的转轴和轴套,所述转轴能相对轴套旋转,所述转轴固定在机身或机臂上,对应的,所述轴套固定在机臂或机身上;所述转轴相对轴套旋转能实现机臂从第一状态到第二状态或从第二状态到第一状态的转换;所述轴套上设置有第一止位部,所述转轴上设置有与第一止位部配合且当机臂处于第二状态时用于阻止转轴继续相对轴套旋转的的第二止位部。
[0007]
作为优选,所述轴套内设有轴孔,所述轴孔的开口处形成有沿轴向向外延伸的凸起,该凸起构成所述第一止位部,所述转轴包括活动插设在轴孔内的插接部以及与插接部连接的连接部,该连接部上形成有能与第一止位部配合相抵的所述第二止位部。第一止位部与第二止位部配合止位在机臂相对机身处于第二状态时阻止机臂继续相对机身旋转的设计有多种,本申请中轴套沿轴向向外延伸形成第一止位部,两者一体成型,生产加工方便;第二止位部设置在连接部上,设计简单,减少了生产加工成本。
[0008]
作为优选,所述第一止位部为弧形凸起片,所述连接部上设置有供轴套上第一止位部穿过的缺口,所述转轴相对轴套旋转时,所述轴套上的第一止位部能穿过缺口后再与第二止位部相抵。本申请通过在连接部上开设让第一止位部绕过的缺口实现机臂相对机身的旋转,缺口与止位部配合实现机臂从第一状态与第二状态之间的转换,设计简单且锁止稳定。
[0009]
作为优选,所述轴套安装在机身内,所述转轴安装在机臂内;所述机身内设置有供轴套安装的第一安装座,所述机臂内设置有供连接部安装的第二安装座。轴套与机身固定的方式有多种,可以卡接固定或者焊接固定等,本申请采用螺栓固定,因此,在机身内设置供轴套安装的第一安装座。第二安装座的设置同理。
[0010]
作为优选,所述机臂上设置有在转轴安装过程中对连接部限位的限位槽。限位槽有利于转轴安装时对其限位,方便其安装。
[0011]
作为优选,所述转轴为阻尼转轴。本申请也可以采用弹性转轴等其它转轴,本申请优选阻尼转轴,本申请的阻尼转轴为任意方向停转轴,在机臂处于第二状态时,可以阻止机臂的回折,同时阻尼转轴具有减震的作用,可以降低旋翼无人机在飞行过程中机臂相对机身晃动,提高整个飞行过程的稳定性和安全性。
[0012]
作为优选,所述机臂的数量为两个,所述机臂设置在沿所述机身宽度方向的两侧。传统的旋翼无人机基本上采用四、六或八的偶数个机臂的形式,然而,例如四个机臂需要连接四个动力承载部,耗电量较大,在现今电池技术无法取得突破性进展的前提下,其续航时间始终无法得到延长。
[0013]
作为优选,所述转轴沿轴向的轴线与所述机身沿长度方向轴线之间的夹角为0~90
°
;所述机臂相对机身处于折叠的第一状态时,所述转轴沿轴向的轴线与所述机臂沿长度方向轴线之间的夹角为0~90
°
,所述机身的重心与转轴沿轴向轴线的垂直距离小于等于所述机身最大宽度的一半。控制在该范围内可以保证机臂展开后动力承载部分中心与机身重心的连接线基本与机身沿长度方向轴线垂直,保证了整个飞行过程的稳定性,并且折叠后机臂可以帖服于机身侧面,以及方便收纳。
[0014]
作为优选,所述机臂相对机身处于打开的第二状态时,所述机臂沿长度方向轴线与机身沿长度方向轴线之间的夹角小于等于90
°
,所述机身的重心与动力承载部中心的连
线与所述机身沿长度方向轴线之间的夹角为88~92
°
。在机臂处于第二状态时,机臂沿长度方向轴线与机身沿长度方向轴线之间的夹角小于等于90
°
,机身的重心与动力承载部中心的连线与机身沿长度方向轴线基本保持垂直,保证了整个飞行过程的稳定性。
[0015]
作为优选,所述机臂相对机身处于折叠的第一状态时,所述机臂沿长度方向轴线与所述机身沿长度方向轴线之间的夹角为0~5
°
。在机臂处于第一状态时,机臂基本紧贴于机身,方便收纳。
[0016]
与现有技术相比,本实用新型的优点在于:本申请通过转轴将机臂与机身转动连接实现机臂的打开和折叠,通过在机身内设置供转轴插设的轴套、在轴套上设置第一止位部、在转轴上设置第二止位部,第一止位部与第二止位部配合在机臂相对机身旋转后处于第二状态时阻止机臂相对机身进一步旋转,使机臂与机身处于稳定的锁止状态,从而确保旋翼无人机在整个飞行过程中的稳定性和安全性。该折叠连接结构在转轴、轴套上设计止位部,在实现机臂折叠、打开功能的同时也实现了机臂与机身处于第二状态时的锁止,该设计简单,打开、折叠易操作,且飞行过程中旋翼无人机稳定性高,具有很强的实用性。
附图说明
[0017]
图1为本实用新型实施例中旋翼无人机的结构示意图(机臂处于第一状态);
[0018]
图2为本实用新型实施例中旋翼无人机的结构示意图(机臂处于第一状态);
[0019]
图3为本实用新型实施例中旋翼无人机的结构示意图(机臂处于第二状态);
[0020]
图4为本实用新型实施例中旋翼无人机的结构示意图(机臂处于第二状态);
[0021]
图5为本实用新型实施例中旋翼无人机的结构示意图(机臂处于第一状态);
[0022]
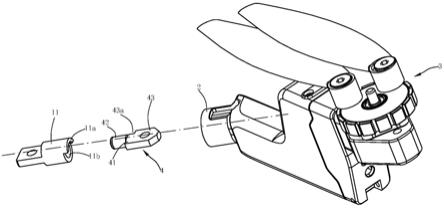
图6为图2中机臂、转轴及轴套的分解图(机臂处于第一状态);
[0023]
图7为图3中机臂、转轴及轴套的分解图(机臂处于第二状态);
[0024]
图8为图3中机臂、转轴及轴套的分解图(机臂处于第二状态)。
具体实施方式
[0025]
以下结合附图实施例对本实用新型作进一步详细描述。
[0026]
如图1~8,本实施例中机臂可折叠的旋翼无人机,包括机身1、与机身1通过折叠连接结构连接的机臂2、与机臂2连接为机身1提供升力的动力承载部3,机臂2相对机身1具有处于折叠的第一状态和处于打开的第二状态。本实施例中,机臂2相对机身1旋转180
°
实现第一状态与第二状态之间的转换。
[0027]
折叠连接结构包括相互配合连接的转轴4和轴套11,转轴4能相对轴套11旋转,本实施例中,转轴4固定在机臂2上,轴套11固定在机身1上;在其他实施方式中,转轴4固定在机身1上,轴套11固定在机臂2上;转轴4相对轴套11旋转能实现机臂2从第一状态到第二状态或从第二状态到第一状态的转换;轴套11上设置有第一止位部11a,转轴4上设置有与第一止位部11a配合且当机臂2处于第二状态时用于阻止转轴4继续相对轴套11旋转的的第二止位部41。本实施例中,转轴4为阻尼转轴。轴套11内设有轴孔11b,轴孔11b的开口处形成有沿轴向向外延伸的凸起,该凸起构成所述第一止位部11a,转轴4包括活动插设在轴孔11b内的插接部42以及与插接部42连接的连接部43,该连接部43上形成有能与第一止位部11a配合相抵的第二止位部41。
[0028]
第一止位部11a为弧形凸起片,连接部43上设置有供轴套11上第一止位部11a穿过的缺口43a,转轴4相对轴套11旋转时,轴套11上的第一止位部11a能穿过缺口43a后再与第二止位部41相抵,参见图6~8。
[0029]
机身1内设置有供轴套11安装的第一安装座12,机臂2内设置有供连接部43安装的第二安装座21。机臂2上设置有在转轴4安装过程中对连接部43限位的限位槽22,参见图6。
[0030]
本实施例中,机臂2的数量为两个,机臂2设置在沿机身1宽度方向的两侧。参见图1、图2及图5。转轴4沿轴向的轴线与机身1沿长度方向的轴线之间夹角度a为0~90
°
。
[0031]
机臂2相对机身1处于折叠的第一状态时,转轴4沿轴向的轴线与机臂2沿长度方向的轴线之间的夹角为β;机身1的重心与转轴4沿轴向轴线之间的垂直距离为d;β角为0~90
°
、垂直距离d小于等于所述机身1最大宽度的一半。机臂2相对机身1处于折叠的第一状态时,机臂2沿长度方向轴线与机身1沿长度方向轴线之间的夹角为0~5
°
,优选为0
°
,机臂2贴合在机身1上,参见图2。
[0032]
机臂2相对机身1处于打开的第二状态时,机臂2沿长度方向轴线与机身1沿长度方向轴线之间的δ夹角小于等于90
°
。机臂2相对机身1处于打开的第二状态时,机身1的重心与动力承载部3中心的连线与机身1沿长度方向轴线之间的夹角γ为88~92
°
,优选为90
°
,保证旋翼无人机整个飞行过程中的稳定性,参见图4。
[0033]
工作原理:原始状态为机臂2相对机身1处于折叠的第一状态,转动机臂2,此时轴套11上的第一止位部11a穿过连接部43上的缺口43a后与第二止位部41相抵,此时,机臂2与机身1锁止,机臂2不能再相对机身1继续旋转,同时在阻尼转轴4的作用力下,克服了机臂2与动力承载部3的重力,阻止在第二状态时机臂2的回折,本申请在实现旋翼无人机便于收纳的同时保证了旋翼无人机整个飞行过程中的稳定性和安全性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1