固定翼垂直起降无人机的制作方法
[0001]
本实用新型涉及飞行设备技术领域,尤其是涉及一种固定翼垂直起降无人机。
背景技术:
[0002]
传统固定翼无人机的机体在垂直状态进行悬停,机体的抗风性较差,为避免侧翻,无人机的机身长度受限,限制无人机的气动布局;或者虽采用垂直起降,固定翼无人机的机身、机翼等气动部件的飞翼布局不合理,导致无人机的气动效率较低,并且飞行时的稳定性和操作性较差。
技术实现要素:
[0003]
本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出一种固定翼垂直起降无人机,能够提高无人机的飞行稳定性。
[0004]
本实用新型的一个实施例提供了一种固定翼垂直起降无人机,包括:
[0005]
机身主体;
[0006]
外翼,设置有两个,对称设置于所述机身主体两侧;
[0007]
尾翼,设置有两个,呈v型对称连接于所述机身主体的尾部;
[0008]
驱动部,用于提供飞行动力,与所述机身主体和/或所述外翼连接。
[0009]
本实用新型实施例中的固定翼垂直起降无人机至少具有如下有益效果:
[0010]
本实用新型中,无人机能够在驱动部的驱动下进行起降、悬停、飞行,通过在机身主体尾端设置v型尾翼,降低无人机飞行控制的难度并增加俯仰配平能力,从而提高无人机的俯仰偏航稳定性及操控性,并且通过尾翼的风标效应,减小了无人机的迎风面积,提高了无人机的抗风性。
[0011]
根据本实用新型的另一些实施例的固定翼垂直起降无人机,所述外翼与所述机身主体融合。
[0012]
根据本实用新型的另一些实施例的固定翼垂直起降无人机,所述外翼及所述机身主体的上侧轮廓线呈s型。
[0013]
根据本实用新型的另一些实施例的固定翼垂直起降无人机,所述驱动部包括多个旋翼,所述旋翼能够转动。
[0014]
根据本实用新型的另一些实施例的固定翼垂直起降无人机,所述旋翼安装于所述外翼前缘及所述机身主体的尾端。
[0015]
根据本实用新型的另一些实施例的固定翼垂直起降无人机,每一所述外翼均连接有所述旋翼,所述旋翼相对于所述机身主体对称。
[0016]
根据本实用新型的另一些实施例的固定翼垂直起降无人机,所述旋翼能够相对所述机身主体和/或所述外翼倾转,以改变所述旋翼的转动平面。
[0017]
根据本实用新型的另一些实施例的固定翼垂直起降无人机,所述旋翼能够折叠。
[0018]
根据本实用新型的另一些实施例的固定翼垂直起降无人机,所述机身主体的尾部
伸出尾段,所述尾翼与所述旋翼安装于所述尾段。
[0019]
根据本实用新型的另一些实施例的固定翼垂直起降无人机,还包括能源系统,能源系统容置于所述外翼和/或所述机身主体内。
附图说明
[0020]
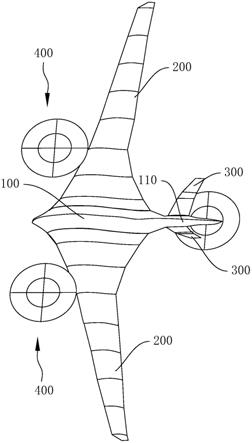
图1是本实用新型固定翼垂直起降无人机一个飞行状态的结构示意图;
[0021]
图2是本实用新型固定翼垂直起降无人机另一飞行状态的结构示意图;
[0022]
图3是本实用新型固定翼垂直起降无人机其他飞行状态的结构示意图;
[0023]
图4是本实用新型固定翼垂直起降无人机其他飞行状态的结构示意图;
[0024]
图5是本实用新型固定翼垂直起降无人机其他飞行状态的结构示意图。
[0025]
附图标记说明:
[0026]
机身主体100,尾段110;
[0027]
外翼200,安装架210;
[0028]
尾翼300;
[0029]
驱动部400,旋翼410。
具体实施方式
[0030]
以下将结合实施例对本实用新型的构思及产生的技术效果进行清楚、完整地描述,以充分地理解本实用新型的目的、特征和效果。显然,所描述的实施例只是本实用新型的一部分实施例,而不是全部实施例,基于本实用新型的实施例,本领域的技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本实用新型保护的范围。
[0031]
在本实用新型实施例的描述中,如果涉及到方位描述,例如“上”、“下”、“前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0032]
在本实用新型实施例的描述中,如果某一特征被称为“设置”、“固定”、“连接”、“安装”在另一个特征,它可以直接设置、固定、连接在另一个特征上,也可以间接地设置、固定、连接、安装在另一个特征上。在本实用新型实施例的描述中,如果涉及到“若干”,其含义是一个以上,如果涉及到“多个”,其含义是两个以上,如果涉及到“大于”、“小于”、“超过”,均应理解为不包括本数,如果涉及到“以上”、“以下”、“以内”,均应理解为包括本数。如果涉及到“第一”、“第二”,应当理解为用于区分技术特征,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
[0033]
图1中示出了本实用新型中固定翼垂直起降无人机一个飞行状态的结构示意图,参照图1,本实施例中固定翼垂直起降无人机包括机身主体100、外翼200、尾翼300及驱动部,外翼200作为固定翼与机身主体100固定连接,外翼200 设置有两个并相对机身主体100对称,驱动部400用于为无人机提供飞行动力,保证无人机能够进行起降、悬停及飞行,驱动部400可以安装于机身主体100和 /或外翼200上;本实施例中,在机身主体100的尾端设置有尾翼300,尾翼300 设有两个,且呈v型对称连接于机身主体100的尾端,v型尾翼300能够降低无人机飞行控制的难度并增加俯仰配平的能力,克服无人机飞翼布局本身俯仰/横向
稳定性不足的缺陷,并且机身主体100的尾端以及尾翼300对巡航阻力的影响较小,能够有效保证无人机在平飞过程中的俯仰偏航的稳定性及操控性;另外,本实施例中的v型尾翼300具有风标特性,在无人机呈悬停状态,处于阵风环境时,尾翼300受到侧风后自然产生一个顺应风向的力矩将机头指向迎风方向,减小迎风面积,从而降低无人机的能耗,提高无人机的抗风性。
[0034]
本实施例中,无人机能够在驱动部400的驱动下进行起降、悬停、飞行,通过在机身主体100尾端设置v型尾翼300,降低无人机飞行控制的难度并增加俯仰配平能力,从而提高无人机的俯仰偏航稳定性及操控性,并且通过尾翼300的风标效应,减小了无人机的迎风面积,提高了无人机的抗风性。
[0035]
另外,本实施例中,外翼200与机身主体100融合形成中央升力体,从而机身主体100与外翼200均能够为无人机提供升力,同时翼身融合的中央升力体内部装载空间增大,增大了无人机的能源系统搭载空间,能源系统内的电池容量增大,可提高无人机的巡航时间,能源系统可以容置于外翼200和/或机身主体100 内,能源系统包括装载设备、电池、燃料、有效载荷等。翼身融合的中央升力体与外翼200组合后,能够显著增加无人机的展长,进而提升无人机的浸润面积展弦比及气动效率,减小了无人机的诱导阻力,从而通过阻力的减小与升力的提高的叠加组合,提高无人机的巡航效率。
[0036]
本实施例中,外翼200与机身主体100融合,且二者的上侧轮廓线形状相同,使外翼200与机身主体100融合形成一个飞翼,本实施例中,外翼200与机身主体100的上侧轮廓线后缘呈s型,基于空气动力学,该设置方式在考虑俯仰配平的前提下,提供了额外升力并增加了有效翼展,降低了诱导阻力,从而大幅提高无人机的巡航飞行效率。通过设置混合翼身以及s型中央升力体,相较于现有的垂直起降无人机,续航时间提高1-2倍。外翼200与机身主体100的上侧轮廓线可设置为反弯翼型,反弯翼型的机翼可以降低无人机的气动低头力矩,从而对无人机的焦点进行调整,使无人机的全机焦点与机翼焦点重合,无人机的升力作用点和重心重合,保证无人机飞行的稳定性。
[0037]
另外,需要说明的是,本实施例中的无人机采用融合翼身以及v型尾翼300 组合方式,混合翼身融合外翼布局的无人机相较于常规的垂直起降无人机在同等速度下升阻比能够提高50%以上,无人机遇侧风时,由于尾翼300风标效应产生的额外气动力转变为飞行阻力,因本实施例中的无人机气动布局升阻比较大,无人机的阻力相较于其他气动力小很多,从而提高了无人机的抗风性。
[0038]
驱动部400可以选择发动机与螺旋桨组合形成动力装置产生前进的推力,由中央升力体产生升力,实现无人机的飞行。本实施例中,驱动部400包括多个旋翼410,旋翼410能够转动,旋翼410转动可产生升力及推力,实现无人机的起降及飞行。
[0039]
本实施例中每一外翼200上均连接有旋翼410,且旋翼410相对于机身主体100对称,以保证无人机飞行的平衡及稳定性。旋翼410安装于外翼200的前缘以及机身主体100的尾端,使旋翼410呈三角形分布,能够通过调整各旋翼410 的转速来改变三角分布的升力来保证无人机飞行状态时的稳定。
[0040]
另外,本实施例中机身主体100后部伸出尾段110,以安装v型尾翼300的气动布局,小的尾段110与v型尾翼300对巡航阻力的影响较小,v型尾翼300 与混合翼身飞翼布局结合,以提高无人机的气动效率及飞行稳定性。机身主体 100尾端的旋翼410与v型尾翼300共
用机身主体100的尾段110,使无人机的混合翼身与旋翼410垂直起降结合,同时满足无人机的升力及飞行稳定性需求。
[0041]
图1中示出了无人机的垂直起降及悬停阶段的状态图,旋翼410的转动平面水平,提供向下的推力,通过改变不同旋翼410的转速能够保证无人机在悬停状态下左右和前后的姿态稳定,并且通过连接于外翼200前缘的两个旋翼410的矢量差动来实现无人机的偏航控制。
[0042]
另外,本实施例中的旋翼410能够相对机身主体100和/或外翼200倾转,以改变旋翼410的转动平面,使旋翼410产生不同方向的推动力,满足无人机在不同阶段的飞行需求。
[0043]
图2示出了无人机在垂直起降或悬停状态向平飞状态过渡状态的结构示意图,该过程中,前后旋翼410同时倾转一定角度,旋翼410的转动平面呈倾斜状,可同时提供垂直升力及前后推力,使无人机在保持足够升力的同时向前加速。旋翼410的倾斜角度可根据无人机的实际飞行需求选择,本实施例中,旋翼410倾转45
°
。
[0044]
图3示出了无人机在平飞状态的结构示意图,在无人机加速到预设速度后,旋翼410的倾角转换成零度,旋翼410的转动平面垂直,无人机平飞,旋翼410 只提供推力不提供升力。
[0045]
由于本实施例中的旋翼410能够无级倾转,因此无人机在垂直起降、悬停阶段所需的升力以及巡航阶段所需的推力可以共用一套动力系统,相较于复合式垂直起降布局的无人机采用两种独立的驱动系统,减少了动力系统的重量及无人机的负载,倾转旋翼410不受机翼翼展的限制,更容易与混合翼身的外翼200结合。
[0046]
另外,本实施例中,旋翼410还可进行折叠,使旋翼410贴近外翼200或者机身主体100尾端,实现对旋翼410进行收纳的效果。由于无人机采用翼身融合布局,其本身的升阻比较高,在无人机平飞至巡航速度后,对推力的需求大幅度减小,此时可选择撤除无人机尾段110或者外翼200前缘的动力,将相应部位的旋翼410折叠,从而大幅降低旋翼410与机身主体100、外翼200之间的气动干扰、飞行阻力以及动力系统的功耗,提高无人机的巡航效率。图4为撤除机身主体100尾端旋翼410动力的飞行状态图,图5为撤除外翼200前缘旋翼410动力的飞行状态图。
[0047]
需要说明的是,旋翼410的倾转与折叠可通过常规的旋转部件执行。以外翼 200上的旋翼410为例,外翼200前缘伸出安装架210,旋翼410转动安装于安装架210上,旋翼410转动时能够产生升力或推力;旋翼410与安装架210之间还设置转动轴(未示出),转动轴与安装架210转动连接,旋翼410与转动轴转动连接,转动轴相对安装架210的转动平面与旋翼410相对转动轴的转动平面不平行,转动轴通过电机驱动进行转动,从而在转动轴相对安装架210转动时,旋翼410的转动平面发生变化;安装架210可与外翼200铰接,安装架210能够相对外翼200转动,安装架210转动后将旋翼410与转动轴贴近外翼200,实现旋翼410的折叠,或者将安装架210设置为连杆结构,连杆与外翼200铰接,连杆转动同样可将旋翼410与转动轴贴近外翼200,实现旋翼410的折叠。上述提供了通过安装架210的转动,使旋翼410折叠于外翼200底部的情况,当然也可在安装架210上安装驱动部件,使旋翼410折叠于安装架210的侧部,驱动折叠的方式此处不一一列出。
[0048]
另外,无人机上还可安装云台,云台上搭载摄像元件,摄像元件可对无人机的巡航情况进行拍摄记录,无人机上还可设置控制元件、gps感应元件等,便于获取无人机的飞行
信息及位置信息。
[0049]
上面结合附图对本实用新型实施例作了详细说明,但是本实用新型不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下作出各种变化。此外,在不冲突的情况下,本实用新型的实施例及实施例中的特征可以相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1