航天器服务装置及相关组件、系统和方法与流程
航天器服务装置及相关组件、系统和方法
1.优先权要求
2.本技术要求享有2019年1月15日提交的、题名为“spacecraft servicing devices and related assemblies,systems,and methods”的美国临时专利申请序列no.62/792,779的优先权。
技术领域
3.本公开的实施例总体上涉及用于航天器(例如,卫星)的服务装置。尤其,本公开的实施例涉及服务装置,所述服务装置包括一个或多个可拆卸的服务装置(例如,吊舱或模块)以及相关的装置、系统、组件和方法。
背景技术:
4.成千上万的航天器绕地球运行以用于执行各种功能,包括例如电信、gps导航、气象预报和制图。像所有机器一样,航天器定期地需要服务以延长其功能寿命。服务可以包括例如部件修复、补充燃料、轨道上升、站位保持、动量平衡或其它维护。为实现这一点,可以将服务航天器送入轨道中,使其与需要维护的客户航天器对接,并且在对接之后对客户航天器执行延长使用寿命的维护。在没有延长使用寿命的维护的情况下,这些航天器会停止服务,替换的费用通常是非常昂贵的,并且交货时间会长达数年。
5.各种专利和出版物已经考虑到此类航天器服务以及相关的特征和问题,包括美国专利no.3,508,723、no.4,219,171、no.4,391,423、no.4,588,150、no.4,664,344、no.4,898,348、no.5,005,786、no.5,040,749、no.5,094,410、no.5,299,764、no.5,364,046、no.5,372,340、no.5,490,075、no.5,511,748、no.5,735,488、no.5,803,407、no.5,806,802、no.6,017,000、no.6,299,107、no.6,330,987、no.6,484,973、no.6,523,784、no.6,742,745、no.6,843,446、no.6,945,500、no.6,969,030、no.7,070,151、no.7,104,505、no.7,207,525、no.7,216,833、no.7,216,834、no.7,240,879、no.7,293,743,no.7,370,834、no.7,438,264、no.7,461,818、no.7,484,690、no.7,513,459、no.7,513,460、no.7,575,199、no.7,588,213、no.7,611,096、no.7,611,097、no.7,624,950、no.7,815,149、no.7,823,837、no.7,828,249、no.7,857,261、no.7,861,974、no.7,861,975、no.7,992,824、no.8,006,937、no.8,006,938、no.8,016,242、no.8,056,864、no.8,074,935、no.8,181,911、no.8,196,870、no.8,205,838、no.8,240,613、no.8,245,370、no.8,333,347、no.8,412,391、no.8,448,904、no.8,899,527、no.9,108,747、no.9,302,793、no.9,321,175和9,399,295;美国专利公布no.2004/0026571、no.2006/0145024、no.2006/0151671、no.2007/0228220、no.2009/0001221、no.2012/0112009、no.2012/0325972、no.2013/0103193、no.2015/0008290、no.2015/0314893、no.2016/0039543和no.2016/0039544;欧洲专利no.ep 0541052、no.0741655b1、no.0741655b2和1654159;pct公开no.2005/110847、no.2005/118394、no.2014/024199和2016/030890;日本专利no.jph01282098;《automated rendezvous and docking of spacecraft》,fehse,wigbert,剑桥大学出版社(2003年);
《on
‑
orbit servicing missions:challenges and solutions for spacecraft operations》,sellmaier,f.等人,2010年航天行动会议,aiaa 2010
‑
2159(2010);以及《towards a standardized grasping and refueling on
‑
orbit servicing for geo spacecraft》,medina、alberto等人,《宇航学报》134 1
‑
10(2017);deos
–
《the in
‑
flight technology demonstration of german’s robotics approach to dispose malfunctioned satellites》,reintsema,d.等人,这些专利中的每个的全部公开内容由此通过该引用合并于此。
6.然而,为航天器提供多种服务选择的可靠且坚固的服务航天器会是成本过高的。另一方面,成本较低的选择会无法提供对于许多应用而言所必需的各种服务选择以及可靠且强大的服务功能。
技术实现要素:
7.本公开的实施例包括一种航天器服务装置,所述航天器服务装置包括:本体,所述本体被配置为在除了地球同步轨道以外的初始轨道上从运载航天器部署;至少一个航天器服务部件,所述至少一个航天器服务部件被配置为在联接至目标航天器的同时在目标航天器上执行至少一项服务操作;推进器组件,所述推进器组件被配置为改变航天器服务装置的轨道、速度或动量中的至少一个;以及对接机构,所述对接机构用于将本体联接至目标航天器,其中,推进器组件被配置为在本体从运载航天器部署之后将本体从初始轨道运输到地球同步轨道。
8.本公开的实施例还包括一种航天器服务装置,所述航天器服务装置包括:本体,所述本体被配置为在除了航天器服务装置的最终目的地轨道以外的初始轨道上从运载航天器部署;至少一个航天器服务部件,所述至少一个航天器服务部件被配置为在联接至目标航天器的同时在目标航天器上执行至少一项服务操作;以及对接机构,所述对接机构用于将本体联接至目标航天器,其中,本体被配置为在本体从运载航天器部署之后从初始轨道运输到最终目的地轨道,并且其中,对接机构被配置为在另一联接航天器的辅助下联接至目标航天器,所述另一联接航天器被配置为相对于目标航天器保持和定位本体。
9.本公开的实施例还包括一种航天器服务装置,所述航天器服务装置包括:推进器组件,所述推进器组件包括至少一个推进器,其中,推进器组件被配置为在航天器服务装置未联接至另一航天器的同时将航天器服务装置的轨道从第一轨道改变到第二轨道;本体,所述本体被配置为在邻近目标航天器的位置处通过运载航天器联接至目标航天器;至少一个航天器服务部件,所述至少一个航天器服务部件被配置为在本体联接至目标航天器的同时在目标航天器上执行至少一项服务操作,其中,至少一个航天器服务部件包括推进器组件,并且推进器组件还被配置为在本体联接至目标航天器的同时改变目标航天器的轨道、速度或动量中的至少一个;以及通信装置,所述通信装置被配置为从远离航天器服务装置的传输位置接收与目标航天器的轨道、速度或动量中的至少一个有关的数据。
10.本公开的实施例还包括一种服务于航天器的方法。该方法包括:将吊舱部署在比地球同步轨道低的初始轨道上;将吊舱从初始轨道基本运输到地球同步轨道;将吊舱联接至在地球同步轨道上的航天器;以及在将吊舱联接至航天器之后,执行至少一项航天器服务操作。
11.以上概述并非旨在描述本公开的每个示出的实施例或每个实施方案。
附图说明
12.本技术中包括的附图被并入本说明书中并且形成其一部分。这些附图示出本公开的实施例,并且与本描述一起用于解释本公开的原理。这些附图仅是某些实施例的图示并且不限制本公开。
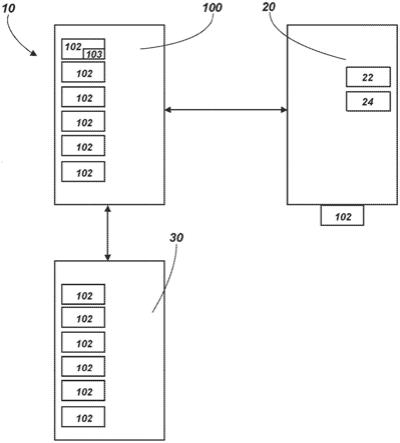
13.图1a是根据本公开的一个或多个实施例的航天器服务系统和待被服务的目标航天器的简化示意图。
14.图1b示出可以在图1a的航天器服务系统的一个或多个装置上实现的燃料箱供给装置的实施例。
15.图2a是根据本公开的一个或多个实施例的航天器服务装置的简化示意图。
16.图2b是根据本公开的一个或多个实施例的航天器服务装置的简化示意图。
17.图2c至图2k示出根据本公开的一个或多个实施例的联接机构的各种实施例。
18.图2l是根据本公开的一个或多个实施例的航天器服务装置的透视图。
19.图3是根据本公开的一个或多个实施例的任务扩展吊舱的简化示意图。
20.图4是根据本公开的一个或多个实施例的沿两个推力矢量方向附接至航天器的任务扩展吊舱的简化示意图。
21.图5是根据本公开的一个或多个实施例的沿两个推力矢量方向附接至航天器的任务扩展吊舱的另一个简化示意图。
22.图6是根据本公开的一个或多个实施例的航天器服务系统的再供给装置的简化示意图。
23.图7至图10示出根据本公开的一个或多个实施例的航天器服务装置的各种实施例,所述航天器服务装置包括联接至所述航天器服务装置的多个吊舱。
24.图11是根据本公开的一个或多个实施例的航天器服务系统和待被服务的目标航天器的另一个配置的简化示意图。
具体实施方式
25.本文呈现的图示并不意味着是任何特定装置、组件、系统或其部件的实际视图,而仅仅是用于描述说明性实施例的理想化表示。附图不一定按比例绘制。
26.如本文所用的,术语“基本”对于给定的参数而言意味着并且在由本领域的技术人员将应理解的程度上包括,给定的参数、性能或条件满足例如在可接受的制造公差内的较小程度的方差。例如,基本满足的参数可以是至少约90%的满足,至少约95%的满足,至少99%的满足或100%的满足。
27.本公开的实施例总体上涉及用于向航天器(例如,卫星或其它运载器)(本文以其它方式称为“客户航天器”或“目标航天器”)提供寿命延长服务的航天器服务装置。航天器服务系统、组件或装置(例如,航天器,运载器)可以包括一个或多个可部署的航天器服务装置、吊舱或模块(例如,任务扩展吊舱(mep)),其初始附接至航天器服务装置(例如,mep母舰(mepm)或任务机器人运载器(mrv))或者后来由航天器服务装置捕获。航天器服务装置继而可以将吊舱转移到客户航天器/将吊舱从客户航天器转移。航天器服务再供给装置可以为
航天器服务装置提供额外的吊舱。
28.吊舱(例如,由母舰提供的一个吊舱、五个吊舱、六个吊舱、十个吊舱、十五个吊舱或更多的吊舱)可以被设置到目标航天器(例如,可以被单独地部署和/或附接至航天器),以便为航天器提供寿命延长服务,所述寿命延长服务包括例如部件修复、补充燃料、轨道上升或其它修改(例如,脱离轨道)、重新定位、倾斜下拉、站位保持、动量平衡、动量调整、供给物补充、提供新的供给物或零件(componentry)和/或其它维护。在一些实施例中,吊舱可以用于调整航天器的速度、定位和/或轨道,包括站位保持、倾斜下拉、轨道重新定位和处置。在一些实施例中,吊舱可以用于管理动量并且提供航天器的姿态控制。在一些实施例中,吊舱可以供给替换或附加部件。例如,吊舱可以配备有部件(例如,飞行控制部件、航空电子部件(例如,反作用轮)、马达部件、通信部件、电力系统部件、传感器部件、光学部件、热控制部件、遥测部件、其组合,等等),其可以用于替换失效的零件、增补现有的零件和/或向航天器添加零件以及选定的功能和特征。作为进一步的示例,吊舱可以包括遥测特征,诸如例如使用光电管或照相机(例如,星体跟踪器)测量星体的位置的光学装置。这样的一个或多个装置可以被供给在吊舱上以监测和/或修改航天器的行进特征(例如,姿态)。
29.在一些实施例中,航天器服务装置可以使用机器人航天器服务装置(例如,一个或多个机械手臂,其能够借助用于各种任务的一个或多个末端执行器实现一个或多个自由度)将吊舱中的一个或多个部署和附接至需要服务的航天器,用于在轨卫星服务。例如,航天器服务装置可以将吊舱中的一个或多个部署和附接至航天器的一部分(例如,分离环、发动机、外部附件或任何其它合适的机械附件或联接结构,或任何其它合适的机械附件或联接结构)。在一些实施例中,航天器服务装置可以使用机器人服务装置捕获吊舱中的一个。在一些实施例中,航天器服务装置自身可以在吊舱部署到航天器之前、期间和/或之后执行一些服务任务。
30.航天器服务装置在太空中往返于航天器之间并且可以将任务扩展吊舱安装到需要服务的航天器上。在一些实施例中,航天器服务装置可以将吊舱附接至航天器,并且保持吊舱附接以用于服务。例如,吊舱可以永久地附接至航天器并且实质上成为航天器的另一个部件,其可以与航天器的现有系统通信或者可以不与航天器的现有系统通信。在这样的实施例中,吊舱可以被配置为在选定的时间量内提供服务(例如,用于短期服务和/或长期服务,例如,在几分钟内、在几周内、在几个月内、在几年内或其组合)。在一些实施例中,航天器服务装置或另一个类似装置可以在选定的服务量之后移除吊舱、补充吊舱(例如,对吊舱补充燃料)和/或替换吊舱。例如,服务系统的一部分(例如,航天器服务装置或另一个部分,诸如,以下讨论的再供给装置)可以再访问吊舱以对吊舱再供给(例如,重新填充、补充、增补等)一种或多种消耗物(例如,燃料、天然气、零件等)。在一些实施例中,航天器服务装置可以将具有这种消耗物的附加装置(例如,箱)附接至吊舱。在一些实施例中,航天器服务装置可以将吊舱与航天器分离、对吊舱补充和/或翻新以将吊舱重新安装(例如,将吊舱重新使用)在相同或另一个航天器上。
31.一旦吊舱被附接至航天器,吊舱可以被激活并且通过改变速度(例如,通过提供δv)来提供例如轨道维护,包括例如改变航天器的方向(例如,通过改变航天器的轨道、位置或其它取向)。通过在正确的时间和方向上为航天器和任务扩展吊舱的总质量提供速度变化,例如,通过替换(例如,完全替换航天器的推进功能,或者通过降低维持期望的速度、位
置和轨道所需的航天器燃料消耗率),任务扩展吊舱可以延长航天器的在轨寿命。任务扩展吊舱可以根据从与航天器有关的数据中获取的时间表而向航天器提供这种速度变化。在一些实施例中,对于调度时间表所需的数据可以被预先编程到任务扩展吊舱中。在一些实施例中,这样的时间表和其它数据可以在吊舱已经发射和/联接至航天器之后被发送到任务扩展吊舱。在一些实施例中,吊舱可以被配置为在没有与航天器的其它系统或属性交互的情况下仅向飞行器提供推力(例如,相对低幅值的推力)。在一些实施例中,吊舱可以被配置为提供围绕航天器的扭矩,使得航天器能够调整其动量。在其它实施例中,吊舱可以提供其它服务(例如,如本文所讨论的)和/或可以与航天器的一个或多个系统或子系统至少部分地通信。
32.在一些实施例中,卫星服务系统可以被配置为一旦航天器服务装置上的多个吊舱已经减少或耗尽就借助任务扩展吊舱供给或再供给装置(mepr)向航天器服务装置供给或再供给吊舱。例如,一旦任务扩展吊舱的供给减少或耗尽,航天器服务装置可以获取新的吊舱的供给(例如,一个吊舱、五个吊舱、六个吊舱、十个吊舱、十五个吊舱或更多个吊舱),以继续向潜在的航天器提供寿命延长服务。
33.任务扩展吊舱再供给装置(例如,航天器)可以运载多个(例如,1个、2个、3个、4个、5个或更多个吊舱),以便与航天器服务装置会合并且将吊舱供给到该装置。例如,具有任务扩展吊舱的吊舱再供给装置可以被放置在地球同步轨道(geo)或其它轨道中,同时航天器服务装置会合到其位置。一旦航天器服务装置接近任务扩展吊舱再供给装置,航天器服务装置和/或吊舱再供给装置上的一个或多个装置(例如,航天器服务装置的机械手臂)可以将任务扩展吊舱从任务扩展吊舱再供给装置重新定位到航天器服务装置。在其它实施例中,吊舱再供给装置可以被配置为行进到航天器服务装置。在其它实施例中,吊舱再供给装置上的一个或多个装置可以被配置为将吊舱供给到航天器服务装置或吊舱再供给装置,并且航天器服务装置可以被配置为联接在一起或以其它方式置于物理通信中,以便转移吊舱中的一个或多个。在其它实施例中,吊舱再供给装置可以被配置为将多个吊舱(例如,一个、两个、四个、八个、十六个或更多个)运载到与航天器服务装置不同的轨道,在该点处吊舱可以在其自身的推进力和/或动力下行进到航天器服务装置。
34.在一些实施例中,任务扩展吊舱再供给装置可以向航天器服务装置提供额外的供给或服务。例如,吊舱再供给装置可以为根据需要操纵的航天器服务装置提供额外的推进剂。在一些实施例中,吊舱再供给装置可以通过补充燃料操作和/或通过将装载有推进剂的箱从再供给装置转移到服务装置(例如,借助在航天器服务装置和再供给装置中的一个或多个上的一个或多个机械手臂)来将推进剂转移到航天器服务装置。
35.在一些实施例中,例如,航天器服务装置和用于任务扩展吊舱递送的航天器中的一个或多个可以由改进型一次性运载火箭(eelv)二级有效载荷适配器(espa或espa环)级航天器执行和/或包括所述改进型一次性运载火箭(eelv)二级有效载荷适配器(espa或espa环)级航天器,例如,被称为espastar的由弗吉尼亚州福尔斯彻奇市的诺斯鲁普
·
格鲁曼公司(northrup grumman)开发的那些装置,或者在适当的地球同步轨道或其它轨道上会能够出现的任何其它合适类型的装置、航天器或运载火箭。
36.在一些实施例中,卫星服务系统的一个或多个装置或部件可以例如通过将它们从选定的地球同步轨道运输到地球同步倾弃轨道(例如,对于航天器服务装置和/或任务扩展
吊舱再供给装置而言)或者通过放弃在航天器上的适当位置中(例如,对于任务扩展吊舱而言)来处置。
37.图1a示出航天器服务系统10的简化示意图,其中航天器服务系统10的至少一部分可以被操作以接近、捕获、对接和/或服务于装置(例如,另一个运载器或航天器20)。然而,在一些实施例中,航天器服务装置100可以被配置为接近航天器20并且将一个或多个模块或吊舱102(例如,任务扩展吊舱102)转移到航天器20,如下面更详细地讨论的。
38.这种航天器20可以处于低地球轨道、中地球轨道、地球同步轨道中、超出地球同步轨道以外或者处于围绕诸如地球的物体的另一个轨道中。航天器20可以包括部件,例如,发动机、分离环和在航天器领域中已知的和/或实现的任何其它类型的特征(例如,推进装置或系统22、燃料箱24等),其可以用于为将吊舱102机械联接至航天器20而提供。例如,发动机可以是液体远地点发动机、固体燃料马达、推进器或其它类型的发动机或马达。发动机可以被定位在航天器20的天顶甲板上,所述天顶甲板在航天器绕地球运行的情况下是航天器的基本与地球相对定位的甲板。
39.如图1a所示,航天器服务装置100可以是被设计成接近和服务于航天器20的单独的航天器。航天器服务装置100可以促进向航天器20提供服务,包括站位保持、轨道上升、动量调整(例如,围绕一个或更多个轴线卸载动量)、姿态控制、重新定位、脱离轨道、补充燃料、修复、倾斜下拉或其它可以在轨提供的服务。航天器服务装置100包括一个或多个可部署的吊舱或模块102,其初始附接至航天器服务装置100或者后来由航天器服务装置100捕获。吊舱102可以被设置到航天器20(例如,可以被部署和/或附接至航天器)并且可以包括服务零件103(例如,为清楚起见,仅在吊舱102的一示例示出),以便服务(例如,向航天器20提供寿命延长服务),包括例如部件修复、替换和/或添加、补充燃料、轨道上升、站位保持、动量平衡、供给物补充、提供新的供给物和/或其它维护。
40.如图1a所示,至少一个吊舱可以从航天器服务装置100提供并且联接至航天器20(例如,靠近或沿着穿过航天器的质心延伸的轴线),以便提供这种服务。
41.在一些实施例中,航天器服务系统10可以包括任务扩展吊舱供给或再供给装置30,其被配置为例如一旦航天器服务装置100上的多个吊舱102已经减少或耗尽就向航天器服务装置100供给或再供给吊舱102。例如,一旦任务扩展吊舱102的供给减少或耗尽,航天器服务装置100可以获取新的吊舱102的供给(例如,一个吊舱、五个吊舱、十个吊舱、十五个吊舱或更多个吊舱),以继续向潜在的航天器20提供寿命延长服务。在一些实施例中,具有任务扩展吊舱102的吊舱再供给装置30可以被放置在地球同步轨道(geo)中,同时航天器服务装置100会合到其位置。一旦航天器服务装置100接近任务扩展吊舱再供给装置30,航天器服务装置100和吊舱再供给装置30之一或两者上的一个或多个装置(例如,以下讨论的航天器服务装置100上的机械手臂)可以将任务扩展吊舱102中的一个或多个从任务扩展吊舱再供给装置30重新定位到航天器服务装置100。在一些实施例中,吊舱再供给装置30和航天器服务装置100中的一个可以被配置为保持另一个,以便将任务扩展吊舱102重新定位。例如,航天器服务装置100可以接近吊舱再供给装置30并且与再供给装置30对接或以其它方式与其接合。一旦对接,航天器服务装置100可以将吊舱102中的一个或多个(例如,使用机械手臂)从再供给装置30转移到航天器服务装置100。然后,航天器服务装置100可以将更多的吊舱断开对接(undock)并且将其部署到其它装置。在其它实施例中,吊舱再供给装置30
可以被配置为行进到航天器服务装置100。在其它实施例中,吊舱再供给装置30上的一个或多个装置(例如,机械手臂)可以被配置为将吊舱102供给到航天器服务装置100。
42.为了将吊舱102定位在目标航天器20上,航天器服务装置100可以将吊舱102定位和储存在一个或多个机构122(图2a)的工作范围内,所述一个或多个机构122被配置为定位吊舱、使吊舱运动和/或安装吊舱。如以下所描述的,该机构可以包括一个或多个机械手臂122和/或另一类型的部署装置(例如,联接机构),例如,可延伸的和/或可扩展的吊杆(boom),类似于下面讨论的部署装置160,其被配置为将航天器服务装置100固定到吊舱102,如以下所描述的。在一些实施例中,一个或多个机械手臂122可以包括一个或多个自由度,使手臂122能够沿着一个或多个运动轴线运动。例如,在一些实施例中,手臂122可以包括可沿一个运动轴线平移的可延伸的吊杆(例如,类似于下面讨论的部署装置160)或者包括能够沿一个或多个运动轴线旋转和/或平移的装置。如果利用第一单个机构(例如,手臂)不足以工作,则任选地可以实施第二机构(例如,能够使吊舱102运动或重新取向的第二手臂或某一其它装置)以使吊舱102运动到用于将吊舱102安装到目标航天器20上的第一机构的工作范围内。
43.例如,吊舱102可以在一个或多个机械手臂的工作范围内定位在航天器服务装置100的结构上或中。如果借助单个手臂不足以工作,则使用任选的第二手臂或其它装置将吊舱102运动到另一个用于将吊舱102安装到目标航天器20上的机械手臂的工作范围内。
44.在一些实施例中,吊舱102可以在一个或多个机械手臂的工作范围内被定位在一个或多个可分离结构上。一旦吊舱102被耗尽(例如,完全耗尽),可分离结构可以与航天器服务装置100分离。在这样的实施例中,航天器服务装置100的燃料消耗可以减少以用于以后的会合和服务活动。
45.在一些实施例中,吊舱102可以被运载在另一个装置(例如,随航天器服务装置100一起发射的吊舱再供给装置30)上,并且然后在发射之后吊舱102可以被转移到航天器服务装置100。例如,航天器服务装置100可以用于将吊舱再供给装置30拖到地球同步轨道或其它轨道,并且然后运载器可以分离。航天器服务装置100可以使用在航天器服务装置100上的对接机构和在吊舱再供给装置30上的互补结构或一个或多个装置来与吊舱再供给装置30对接。一旦对接,航天器服务装置100上的一个或多个机械手臂可以将一个或多个吊舱102从吊舱再供给装置30转移到航天器服务装置100上的存放位置。这样,对于航天器服务装置100的反复运输以及与目标航天器20的会合,航天器服务装置100的总质量被减到最小,促使在任务的整个生命周期内使用最少的燃油。吊舱再供给装置30可以被协作地控制以将其放置在期望的轨道位置中来用于航天器服务装置100返回和再供给吊舱102。
46.在一些实施例中,并且如以下将讨论的,吊舱102可以使用其自身的推进力和/或动力来改变其轨道以与卫星服务装置100会合。一旦处于期望的位置,航天器服务装置100就可以使用对接机构、机械手臂或存在于航天器服务装置100上的其它能力捕获吊舱102。在捕获之前,吊舱102可以保持在靠近卫星服务装置100或目标航天器20的轨道上,以便减少到达目标航天器20的传输时间。
47.如上所述,系统10的一部分(例如,吊舱102、航天器服务装置100和/或再供给装置30)可以与系统10的另一个部分联接或联接至外部装置(例如,吊舱102、航天器服务装置100和/或航天器20)以对该装置供给(例如,重新填充、补充、增补等)一种或多种消耗物(例
如,燃料、天然气、零件等)。在一些实施例中,这样的供给物可以被供给在附接至该装置的额外外部箱中和/或可以使用现有的部件通过替换(例如,补充燃料)来供给。
48.航天器将通常使用推进剂(例如,氙气,联氨)以在任务寿命内维持定位和指向。这种推进剂的耗尽通常导致任务寿命终止。在一些实施例中,航天器服务装置100、吊舱102和/或再供给装置30(“燃料供给装置”)可以向系统10的另一部分或向外部装置(例如,吊舱102、航天器服务装置100和/或航天器20(“目标装置”))提供额外的推进剂。在其它实施例中,燃料供给装置可以起到供给其它燃料或流体的作用,例如,高压氙气、联氨、氦气、四氧化二氮(nto)、绿色推进剂、其组合或任何其它合适燃料的箱。在一些实施例中,推进剂或燃料的选择可以基于吊舱102的应用(例如,基于航天器20的配置)。
49.图1b示出可以在系统10(图1a)的一个或多个装置上实现的燃料供给装置的这种燃料箱供给装置140的实施例。如图1b所示,在一些实施例中,燃料箱供给装置140上的管道142可以将箱141中的燃料(例如,高压氙气)供给到调节器143(例如,机械和/或电调节器)。调节器143可以将压力控制(例如,降低)到可以由目标装置的系统使用的水平。额外的管道144可以被定位在调节器143的下游,并且可以连接至配对的适配器145。配对的适配器145可以连接至与目标装置的燃料连通的目标装置的联接器(例如,服务端口阀)。在一些实施例中,燃料供给装置的这种配对的适配器145可以包括用于与目标装置的箱联接的连接配件(例如,快速断开配件、协作服务阀和/或简单的机械服务阀)。例如,这种配对的适配器145可以包括打开和关闭流动路径的阀(例如,旋转阀或螺母)。配对的适配器145可以包括联接构件(例如,阴型联接构件),其可以附接至目标装置(例如,互补的阳型联接构件)的联接器(例如,阀端口)。
50.在一些实施例中,可以通过移除帽或塞来制备配对的适配器145,并且可以通过在目标装置的联接上移除任何结构(例如,毯和/或帽或塞)来制备目标装置。一旦制备好,配对的适配器145被机械地附接至目标装置的服务阀,并且一个或多个阀(例如,在目标装置和燃料箱供给装置140上)可以被打开并且压力被监测(例如,在目标装置的系统中的压力检测)。该压力的降低可以指示在燃料箱供给装置140的适配器和燃料箱供给装置140的配对的适配器145之间存在不正确的配对。一旦连接已经被验证,则在配对的适配器145上游的阀可以运动到打开位置,并且燃料箱141将向目标装置的燃料箱供给燃料。在燃料箱供给装置140的箱141没有压力遥测的实施例中,目标装置的系统可以用于监测燃料使用以确定燃料箱供给装置140的箱141是否达到耗尽。随着燃料箱供给装置140的箱141接近耗尽,燃料箱供给装置140的箱141可以通过关闭配对的适配器145上游的阀而从连通中移除,并且目标装置和新的箱可以连接至目标装置(例如,通过替换先前的箱而在相同的燃料箱供给装置140上或者在可以使先前的箱能够保持连接的不同的燃料箱供给装置上)。这样的燃料箱供给装置140可以包括用于初始对系统加压的服务阀146、用于装备和附接至目标装置的机械支撑、抓取附件和/或被动热控制。
51.图2a示出航天器服务装置100(例如,图1a的航天器服务装置100)的实施例的简化示意图。如图2a所示,航天器服务装置100包括一个或多个可部署的吊舱或模块102,其被初始附接至航天器服务装置100。航天器服务装置100可以是卫星或其它位于绕物体的轨道中的航天器。
52.为了将吊舱102捕获、递送、附接和/或取回至另一航天器,航天器服务装置100可
以包括化学或另一类型的反应式发动机和/或可以包括电动推进系统。例如,航天器服务装置100可以包括一个或多个推进器104、包括化学和/或电力推进源(例如,容纳用于离子推进器的氙气推进剂和/或联氨推进剂的燃料箱106)的动力系统以及功率处理单元108。航天器服务装置100的推进系统(例如,包括推进器104)可以使航天器服务装置100能够沿一个或多个运动轴线(例如,对于总共六个运动轴线而言为三个平移轴线和三个旋转轴线)运动。航天器服务装置100可以包括太阳能电池阵列110(例如,可取向的太阳能电池阵列)、电池112、功率调节电子装置(例如,配电组件114)、控制子系统116(例如,命令和数据处理、热控制、制导、导航和控制)、通信子系统118(例如,与相关联的天线120通信的射频(rf))以及附件工具121(例如,用于以下讨论的一个或多个机械手臂的服务零件和/或末端执行器)。这样的部件可以使航天器服务装置100能够操纵到靠近待服务的另一航天器的位置。
53.为了将吊舱102捕获、部署、附接和/或取回至另一航天器,航天器服务装置100可以包括部署和/或移除装置(例如,一个或多个可运动的手臂,例如,具有一个、两个、三个、四个、五个或六个自由度的机械手臂122)、长杆和/或可延伸的部署装置,如以下所讨论的,其可以借助相关联的成像系统(例如,照相机124)以及控制和动力系统(例如,机器人航空电子设备126和电源128)而联接至吊舱102的一部分(例如,发动机的内部部分)。这样的装置和部件可以用于与航天器服务装置100上的吊舱102接合(例如,这样的装置和部件可以用于附接至航天器服务装置100上的吊舱102)。例如,机械手臂122中的一个或多个可以用于联接至一个吊舱102(例如,借助末端执行器)并且使该吊舱102运动到目标航天器附近,以将吊舱102连接至航天器,并且在附接之后释放吊舱102。
54.在一些实施例中,可以利用其它装置和方法来将吊舱102递送和/或附接至航天器。例如,航天器服务装置100自身可以相对于航天器取向以将选定的吊舱102放置成与航天器接触,航天器服务装置100自身可以在施加吊舱102的同时捕获或以其它方式保持航天器,吊舱102可以包括一个或多个用于控制和附接吊舱102的机载系统,航天器服务装置100可以包括可重复使用的且可单独控制的单元,其具有推进单元控制器,所述推进单元控制器被配置为递送吊舱102或其组合。
55.在一些实施例中,航天器服务装置100可以在不使用机械手臂的情况下将吊舱102递送、附接和/或取回。例如,在附接一个或多个吊舱102的情况下,航天器服务装置100可以与目标航天器会合(例如,利用传感器来检测目标航天器的位置和/或取向,诸如下面讨论的那些)。在吊舱102附接至航天器服务装置100的同时,吊舱102的联接机构(也将在下面讨论)可以被部署并且与目标航天器接合。吊舱102可以从航天器服务装置100释放,并且在释放之前、释放期间和/或释放之后可以完成任何剩余的对接程序,以便将吊舱102固定到目标航天器。
56.不管用于捕获、部署、附接和/或取回吊舱102的特定机构或特征部如何,航天器服务装置100可以被配置为使用航天器服务装置100的一个或多个部分将吊舱102直接(例如,经由机构和/或特征部)递送到在目标航天器处的位置。例如,航天器服务装置100可以仅使用部署机构和/或特征部(例如,一个或多个机械手臂122、可延伸的和/或可扩展的对接机构等)来捕获、部署、附接和/或取回吊舱102,所述部署机构和/或特征部被驻留在航天器服务装置100(例如,其一部分)上。在一些实施例中,在不利用吊舱102上的任何操纵(例如,推进)装置的情况下,使用仅驻留在航天器服务装置100上的部署机构和/或特征部。例如,吊
舱102可以直接由航天器服务装置100调遣,而不是在其自身动力或推进下将吊舱102独立地调遣和/或操纵到邻近目标航天器的位置。在运动到适当的位置中之后,航天器服务装置100的机构和/或特征部(例如,一个或多个机械手臂122、可延伸的和/或可扩展的对接机构)和/或吊舱102的特征部(例如,诸如部署装置160的联接机构)可以用于将吊舱102固定至目标航天器。在一些实施例中,在吊舱102保持与航天器服务装置100至少部分地接触的同时,吊舱102可以固定到目标航天器。例如,一旦吊舱102与目标航天器至少部分地接触(例如,固定到目标航天器),吊舱102可以从航天器服务装置100释放。
57.在一些实施例中,航天器服务装置100包括传感器组件,例如,会合操作和靠近操作130(例如,光检测和测距132、红外传感器134和/或可见光传感器136)。这样的部件可以使航天器服务装置100能够监测和/或检测其它物体(例如,吊舱102,当执行与服务有关的功能时的其它航天器)。例如,传感器中的一个或多个(例如,光检测和测距132、红外传感器134和/或可见光传感器136)可以使航天器服务装置100能够相对于目标航天器20促进会合和靠近操作(图1a),以便部署、安装和/或移除吊舱102(图1a)。
58.在一些实施例中,传感器中的一个或多个(例如,光检测和测距132、红外传感器134和/或可见光传感器136)可以使航天器服务装置100能够检测目标航天器20的一个或多个特征部(图1a)。例如,航天器服务装置100的传感器中的一个或多个可以检测目标航天器20的对接特征部(例如,对接、靠泊或联接机构)或目标航天器20的其它特征部(例如,结构特征),以便确定应当将吊舱102附接至目标航天器20的方式。
59.在一些实施例中,航天器服务装置100可以是可至少部分重新配置的,以促进由航天器服务装置100执行的操作。例如,在与航天器20(图1a)联接(例如,对接)期间,装置100可以将各种结构和/或部件(例如,用于与航天器20对接的支柱)重新定位(例如,装载,卸载)。这样的结构和/或部件可以通过一个或多个工具(例如,机械手臂122)拆卸并且放置在临时储存位置中。当航天器服务装置100对接(例如,并且服务于)目标航天器20时,可以附接这些结构和/或部件。
60.在一些实施例中,航天器服务装置100上的特征部可以用于重新配置其它装置(例如,航天器)。例如,航天器服务装置100的一个或多个工具(例如,机械手臂122)可以用于移除这样的结构,即,所述结构在发射之后便于将二级有效载荷堆叠在航天器服务装置100上方。在一些实施例中,航天器服务装置100(例如,以及附接的吊舱102(图1a))可以被附接至espa环或某一其它合适的结构。在发射之后(例如,在轨道上),机械手臂122可以将吊舱102拆开并且将其重新定位到储存位置,并且然后将在发射处置或临时储存期间使用的附件结构拆开。
61.图2b示出航天器服务装置150的实施例的简化示意图,所述航天器服务装置150可以与图2a的航天器服务装置100基本相似,并且所述航天器服务装置150如图所示可以包括航天器服务装置100的部件中的一些、大部分或全部。如图2b所示,航天器服务装置150包括联接机构152(例如,对接、靠泊、保持或以其它方式附接的机构),用于联接至其它装置(例如,其它航天器,例如,航天器20、吊舱102、再供给装置30等)。
62.如上所述,一旦航天器服务装置100在初始供给吊舱102的情况下处于轨道上,航天器服务装置100从目标航天器20(图1a)行进到目标航天器20以安装吊舱102。在一些实施例中,航天器服务装置100可以采用额外的控制技术以相对于航天器20保持在最佳位置处
来允许吊舱102的安装(例如,机器人安装)。该最佳位置可以在航天器20上居中或不居中,并且可以从航天器20退后了选择距离,使得吊舱102和机械手臂122有空间运动到航天器上。来自会合传感器的数据可以被发送到航天器服务装置100上的机器人控制计算机,使得机器视觉和机器人动作控制算法可以具有两个航天器的相对位置和动作的先验知识。
63.图2c至图2k示出根据本公开的一个或多个实施例的联接机构的各种实施例。如图2c和图2d所示,联接机构152可以包括可扩展的对接机构160(例如,具有长矛形状),其被配置为待被接收在航天器20中的至少一个的接收部分(例如,发动机156)(例如,发动机的一部分或可以形成机械联接的其它任何部分)中。在航天器服务装置100相对于航天器20保持该位置时,可扩展的对接机构160通过航天器服务装置100(图2a)或通过使机械手臂引导最终对接来完全地引导到适当位置中。一旦处于适当位置中,一个或多个可扩展部分可以部署和接触接收部分156,以便将可扩展的对接机构160固定到航天器20。
64.在例如2017年12月1日提交的题名为“systems for capturing a client vehicle”的美国专利申请序列no.15,829,807中公开了这种可扩展的对接机构160,该专利申请的全部公开内容由此通过该引用合并于此。例如,可扩展的对接机构160可以被插入航天器20的发动机156内,如图2c所示。一旦插入发动机156中,可扩展的对接机构160的一个或多个部分可以运动(例如,扩展、延伸),以便接触发动机156并且将可扩展的对接机构160固定到发动机156,从而将吊舱102(图1a)固定到航天器20。在固定之前、之后和/或期间,可扩展的对接机构160可以包括延伸手臂,所述延伸手臂被收回以将吊舱102(图1a)放置成更加靠近航天器20。
65.如图2e和图2f所示,联接机构152可以包括可扩展的和/或可收回的对接机构162(例如,具有卡盘的形状),其被配置为与航天器20的接收部分156接合。对接机构162可以以与上述方式类似的方式引导到适当位置中。一旦处于适当位置中,对接机构162可以被收回或扩展,以便将可扩展的对接机构162固定到航天器20。
66.如图2g和图2h所示,联接机构152可以包括圈套器对接机构164(例如,包括定位在腔体的开口处的多条线材,例如,编织的金属线)。圈套器对接机构164可以以与上述方式类似的方式被引导到适当位置中。圈套器对接机构164被配置为通过使接收部分156能够穿过线材中的开口进入而与航天器20的接收部分156接合。一旦处于适当位置中,圈套器对接机构164可以运动(例如,旋转),使得线材至少部分地限制由线材限定的开口,以将圈套器对接机构164固定到航天器20。
67.如图2i和图2j所示,联接机构152可以包括夹紧对接机构166(例如,包括可运动的构件和两个固定构件在内的三点夹紧机构),其被配置为与航天器20的接收部分156接合。对接机构166可以以与上述方式类似的方式被引导到适当位置中。一旦处于适当位置中,对接机构166的一个或多个可运动的构件可以朝向一个或多个固定构件运动,以便将可扩展的对接机构166固定到航天器20。
68.如图2k所示,联接机构152可以包括可胀大的夹紧对接机构168(例如,一个或多个可胀大袋,其被配置为待被接收在接收部分156的外部部分和/或内部部分上),所述可胀大的夹紧对接机构168被配置为与航天器20的接收部分156接合。对接机构166可以以与上述方式类似的方式被引导到适当位置中。一旦处于适当位置中,一个可胀大袋(例如,环形袋)或多个可胀大袋(例如,两个相对的袋)可以被胀大,以便将可扩展的对接机构168固定到航
天器20。在一些实施例中,袋可以被填充有流体(例如,液体),所述流体将至少部分地固化以在结构之间形成至少部分刚性的连接。
69.图2l是航天器服务装置180的透视图,其可以与以上讨论的那些类似。如图所示,航天器服务装置180可以包括本体182,所述本体包括espa环,所述espa环具有围绕本体182联接的吊舱102。每个吊舱102都可以包括用于与目标航天器20(图1a)和任选的太阳能电池阵列186联接的联接机构184。如上所述,联接机构184可以包括矛状的可扩展装置,所述矛状的可扩展装置被配置为与目标航天器20的发动机接合。
70.参照图1a,在又一些额外的实施例中,吊舱102的结构部分(例如,支柱或其它框架构件)可以用于与航天器20对接。例如,机械手臂或其它特征部(例如,非机器人方法)将首先根据航天器20的以及航天器20的部件(例如,分离环)的几何形状和特征将吊舱102定位在预定位置处。然后,航天器服务装置100可以使用吊舱102的结构部分对接到航天器20。一旦完成对接,吊舱102的结构部分可以被固定到航天器20(例如,通过经由通过机器人接口的电子命令或经由来自机器人接口的机电驱动动力来致动夹具或以其它方式加固联接)。然后,航天器服务装置100的一部分(例如,机械手臂)可以释放吊舱102,并且航天器服务装置100可以从航天器20断开对接而留在安装在航天器20上(例如,安装在分离环上)的吊舱102的后方。
71.在又一些额外的实施例中,航天器服务装置100的一部分(例如,机械手臂)可以伸出来并且将吊舱102放置在航天器的一部分(例如,航天器20的分离环或其它兼容机械特征部)上。然后,可以使用对吊舱102或航天器20的电子命令来致动任一装置上的联接机构或机电驱动器以将吊舱102固定在航天器20上的适当位置中。
72.参照图2a,在使用机械手臂放置吊舱102的情况下,机械手臂122、末端执行器和/或其它工具可以采用与对接机构166有关的技术,所述技术将两个运载器之间的零重力接触动力学减到最小。这样的技术包括但不限于将接触界面处的摩擦减到最小,将第一次接触与刚性化之间的时间减到最少(例如,完成对接或其它联接)以及在路径中提供顺应性。在一些实施例中,可以在吊舱102、机械手臂122、航天器服务装置100和再供给装置30的设计中采用无源和有源的第一次接触静电放电(esd)缓解技术,以确保第一次接触esd减到最小或消除。例如,在2017年12月1日提交的题名为“electrostatic discharge mitigation for a first spacecraft operating in proximity to a second spacecraft”的美国专利申请序列no.15/829,758中公开了这种esd缓解技术,其全部公开内容由此通过该引用合并于此。
73.参照图1a,会期望的是当将吊舱102安装在航天器20上时在航天器服务装置100和航天器20之间具有尽可能简短的连接。在一些实施例中,在吊舱102安装期间,航天器20和航天器服务装置100两者可以一起自由漂移了仅较短的一段时间(例如,几秒钟到几分钟),在该较短的时间内建立吊舱102的安装并且航天器服务装置100释放吊舱102以断开两个运载器之间的机械连接。然后,航天器服务装置100的推进系统可以被重新激活,并且航天器服务装置100可以后退至安全位置。此后不久,航天器20的姿态控制系统可以被重新激活,使得目标航天器20可以重新获得其定位。
74.参照图1a和图2a两者,在某些实施例中,在安装之后,吊舱102可以例如借助计时器、传感器(例如,断线计时器或类似传感器)经由例如以下各项被激活:对吊舱102中的收
发器的地面命令,来自机械手臂122的电命令,这使得吊舱102能够感测到它不再连接至航天器服务装置100、再供给装置30或机械手臂122中的任何一个。在一些实施例中,这样的传感器可以包括一个或多个机械限位开关,其通过完成对接或安装机械活动来激活。
75.在又一些额外的实施例中,可以经由并入在航天器服务装置100和吊舱102之间的接口中的特征部来激活吊舱102。例如,航天器服务装置100的部署装置的一部分(例如,机械手臂122上的工具驱动机构或末端执行器)可以协助在吊舱102上激活和/或初始部署附件。这种技术将通过利用航天器服务装置100的机械手臂122(例如,手臂122的末端执行器)的功能以执行吊舱102的部署和启动(例如,吊舱102上的一次致动)来潜在地简化吊舱102的机构。机械手臂122和/或其部件和工具可以执行吊舱102的至少部分在轨组装。例如,使用机械手臂122将附件最终组装到吊舱102上可以允许用于吊舱102部件的简化的、较轻的和/或较低成本的包装以用于发射。
76.图3示出航天器服务装置100的吊舱(例如,图1a的任务扩展吊舱102)的实施例的简化示意图。如图3所示,任务扩展吊舱102包括一个或多个装置,其用于控制吊舱102和附接至吊舱102的主体201的任何其它结构(例如,使吊舱102和附接至吊舱102的主体201的任何其它结构取向和运动)。例如,吊舱102可以包括化学或另一类型的反应式发动机并且/或者可以包括电动推进系统。另外地,吊舱102可以包括混合推进系统(例如,化学、电气或低温气体推进器的组合)。如图所示,一个或多个推进器组件200可以包括一个或多个推进器202(例如,电力推进(ep)推进器),其借助可运动的(例如,可旋转的)联接器(例如,万向节204和吊杆206)附接至(例如,可运动地附接至)吊舱102。在一些实施例中,推进器202相对于主体201的定位可以基于待附接有吊舱的航天器的一个或多个特征(例如,尺寸、规格、质量、质心、其组合等)来选择。在一些实施例中,推进器202可以提供相对低的加速度以将由于推进剂在推进剂箱中到处运动而引起的干扰减到最小或避免所述干扰。
77.虽然图3的实施例示出在单个吊杆206上的一个推进器组件200,但是在其它实施例中吊舱102可以包括在多个吊杆上的多个推进器组件(例如,两个、三个或更多个推进器组件和伴随的吊杆)。例如,可以在两个吊杆上设置两个推进器组件,其中一个推进器组件与另一个推进器组件是基本镜像。此外,在一些实施例中,可以在单个吊杆上设置多个推进器组件。在这样的实施例中,可以实施多个推进器以确保充分地实现该系统的寿命吞吐能力或达到期望的推力水平。例如,在其中吊舱102被配置为自身驱动到特定轨道的实施例中,可以选择推进器以提供轨道上升操作以及由吊舱102在联接至目标航天器20之后执行的后续维护程序。在一些实施例中,一个或多个推进器组件200可以不设置在吊臂上,而是直接安装在吊舱102上。在一些实施例中,一个推进器组件200可以用于寿命延长服务,包括航天器重新定位、站位保持、倾斜下拉、动量调整和/或寿命终止(eol)处置。在一些实施例中,多个推进器组件200可以各自都用于所有寿命延长服务,或者可以被划分为用于不同的寿命延长服务。例如,一个或多个推进器组件200可以被设置在一个或多个吊杆上以用于站位保持服务,而一个或多个推进器组件200可以被安装在吊舱上以用于轨道重新定位、倾斜下拉和eol处置。
78.在一些实施例中,天线208可以被定位在推进器组件200上。在一些实施例中,天线208可以被定位在单独的可部署吊杆上。在一些实施例中,用于发电的额外太阳能电池可以被放置在推进器吊杆组件200上。
79.吊舱102可以包括动力和推进系统210,所述动力和推进系统210包括一个或多个动力源和相关联的零件(例如,其中动力系统的至少一部分可以是电力推进动力系统)。例如,动力系统和推进系统210可以包括一个或多个推进剂箱(例如,容纳氙气推进剂或任何其它合适的用于电力或化学推进系统的推进剂)、推进器(例如,电子推进器)和相关联的动力处理单元。吊舱102可以包括太阳能电池阵列212和一个或多个电池214。在一些实施例中,太阳能电池阵列212可以刚性地联接至主体201或者与具有一个或多个运动轴线的可运动的(例如,可旋转的)联接器(例如,一个或多个万向节216或其它可运动的关节以及提供围绕一个、两个或多个轴线的运动的吊杆218)以朝向太阳指引太阳能电池阵列212。
80.在一些实施例中,万向节状太阳能电池阵列212可以提供优于类似的刚性阵列的许多优点。例如,万向节状太阳能电池阵列212使太阳能电池阵列212能够从目标航天器20的推进器移除/与目标航天器20的推进器间隔开,使得目标航天器20可以执行轨道维护,同时将目标航天器20的推进器飘到吊舱102的太阳能电池阵列上的担忧减到最低。万向节状太阳能电池阵列212还可以使吊舱102与目标航天器20热脱离,并且通过使其能够跟踪太阳来提高太阳能电池阵列212的效力。万向节太阳能电池阵列212的效力的提高使得吊舱102的推进器能够启动(fire)更久的时间,并且还使得能够使用更小、更轻且更便宜的电池。启动时间较长的推进系统可以促进对较重的目标航天器20的服务。在一些实施例中,万向节状太阳能电池阵列212可以在目标航天器20飞越轨道时以保持动量的方式(例如,在没有施予净动量的情况下)铰接。
81.在一些实施例中,太阳能电池阵列212可以在卫星的阳光照射部分服务期间利用吊舱102上存储的逻辑来跟踪太阳,以便将太阳能电池阵列212的发电增到最大,从而将太阳能电池阵列212和电池的尺寸减到最小。在一些实施例中,太阳能电池阵列212的运动可以被限制,例如,以简化机械设计以及将航天器阵列的阴影、来自吊舱102和/或航天器20上的推进器羽流的撞击、与吊舱102和/或航天器20上的传感器或天线的干扰、或其它系统约束消除或减到最小。在一些实施例中,太阳能电池阵列212可以包括具有一个或两个运动轴线的两个分离的翼。在一些实施例中,万向节状太阳能电池阵列212可以包括被配置为抵消吊舱102的旋转的一个运动轴线。
82.在一些实施例中,太阳能电池阵列212被取向为跟踪太阳以向推进系统提供足够的动力,使得连续的电推进力推进能够使吊舱102修改轨道,而不附接至主机航天器20或服务航天器100。
83.吊舱102的实施例可以通过使用诸如栅状离子推进器、霍尔效应推进器、胶体/场效应推进器、电弧喷射器和电阻喷射器的低功率(例如,电力)推进系统而在航天器运载器20(图1a)上以物理上相对小的包装和较轻的足迹提供航天器服务。这样的电力推进系统可以在用于一次或多次燃烧的选定的一段时间内产生所需的量的推力来调整航天器20的定位(例如,在二十四小时的时间段内燃烧两次),其中每个推力持续长达选定的时间段。在一些实施例中,吊舱102可以被定位在航天器和吊舱102的太阳能电池阵列212的面向天顶(例如,反地球)的一侧上,以便每天至少长达十二小时照射未被遮挡的阳光。在一些实施例中,在吊舱102的太阳能电池阵列212被完全照射的同时可以发生一次推进器燃烧,而在吊舱102的太阳能电池阵列212被航天器主体完全遮挡的情况下发生第二次推进器燃烧。
84.在一些实施例中,在由航天器20的本体遮挡吊舱102的太阳能电池阵列212时,可
以在二十四小时的时间段内发生每次推进器燃烧。在一些实施例中,在吊舱102的太阳能电池阵列202被完全照射的情况下,可以在二十四小时的时间段内发生每次推进器燃烧。电池(例如,诸如锂离子电池的电池214)可以用于在吊舱102由太阳光照的时间段内储存能量,并且电池214的尺寸可以被设定为在没有阳光的时间段内支持吊舱102的总线功率损耗以及推进器燃烧功率。在一些实施例中,借助化学推进器执行推进器燃烧。
85.在一些实施例中,吊舱102的动力和推进系统210的推进剂可以包括一定量的推进剂(例如,大约25kg、50kg、100kg、150kg或更多)以在选定的时间段(例如,至少几年)内支持航天器20(图1a)的站位保持(例如,机动和动量调整要求)。在一些实施例中,推进剂可以包括额外量的推进剂,以使用吊舱102的动力和/或推进系统来促进将吊舱102从初始发射插入轨道递送到其预期轨道。吊舱102可以在发射之前装载有推进剂,从而吊舱102一旦进入轨道就不需要推进剂转移。由于航天器20需要重新定位到不同的轨道位置以用于继续其操作寿命或达到其操作寿命的终点,所以吊舱102的推进时间表和位置可以被调整以沿航天器20的轨道速度方向递送速度变化来使航天器20运动到不同的轨道、轨道位置或其组合,用于操作寿命延长或寿命终止处置的目的。
86.在一些实施例中,吊舱102的燃料或推进剂可以用于在不依赖于航天器20的一个或多个系统的情况下服务于航天器20。例如,仅吊舱102的推进剂可以用于服务于航天器20(例如,操纵和/或调整航天器20的至少一个动量,包括姿态)。
87.参照图1a和图3,在一些实施例中,航天器20的燃料箱24可以被绕过(例如,不被利用)以服务于航天器20。例如,吊舱102的推进剂(例如,在与图1b中所示的配置类似的配置中从燃料箱141供给的吊舱102的推进剂,从吊舱102的推进系统210的箱供给的吊舱102的推进剂)可以被供给(例如,直接地被供给)到目标航天器20的推进剂系统22的一部分(例如,同时绕过航天器20的燃料箱24)。在这样的实施例中,吊舱102的推进剂可以用于服务于航天器20而无需将推进剂转移(例如,补充)到航天器20的箱24(例如,通过补充燃料程序)。例如,吊舱102的推进剂可以被联接(例如,经由联接机构152、配对的适配器145(图1b)等流体地联接)到航天器20的燃料系统的一部分。在一些实施例中,这样的现有的连接部可以存在于航天器20上。在一些实施例中,航天器服务装置100和吊舱102中的一个或多个可以将该连接部的至少一部分安装在航天器20上。
88.来自吊舱102的推进剂可以被转移到目标航天器20的推进剂系统22中并且被用于例如使用推进剂系统22的一个或多个推进器来服务于航天器20(例如,操纵和/或调整航天器20的轨道、速度或动量中的至少一个)。
89.在一些实施例中,吊舱102可以没有用于使吊舱102独立运动的推进装置。
90.在一些实施例中,吊舱102可以具有相对低的总质量,例如,小于700千克(kg)(例如,小于600kg、500kg、400kg、350kg、300kg、200kg、100kg或更小)。
91.在一些实施例中,吊舱102被配置为永久地保持在航天器20上而没有被回收或替换。在一些实施例中,吊舱102可以从航天器20拆开并且在不同的客户航天器上使用。在一些实施例中,吊舱102可以从航天器20拆开,由航天器服务装置100或再供给装置30补充燃料,并且被重新附接至航天器20。在一些实施例中,吊舱102可以从客户航天器20拆开,并且可以利用吊舱102的推进系统来修改吊舱轨道,以用于由航天器服务装置100进行后续的会合和捕获。
92.吊舱102可以包括设置在任何合适类型和数量的电子装置上的功率控制器(例如,功率控制器220的单个电路板)和飞行控制器(例如,航空电子控制器222的单个电路板)。在一些实施例中,冗余装置(例如,电路卡、航空电子设备、推进器、传感器、致动器或其它部件)可以被包括在吊舱102中,以增强吊舱102的可靠性、寿命和/或吞吐量。
93.吊舱102可以包括通信子系统224(例如,与天线208和收发器(xcvr)通信的射频(rf)通信)。吊舱102的通信子系统224可以被设计为在定期接触而非连续接触的要求下与可商购的通信服务一起操作。在一些实施例中,出于建立与吊舱102的全向通信覆盖的目的,在图3中示出的吊舱102上的一个或多个合适位置处包括一个或多个附加天线。在这种背景下,当吊杆被取向为用于在吊杆天线不指向地球的方向上推进时,可以建立通信覆盖。在一些实施例中,当吊舱102未连接至再供给装置30、主机航天器20或卫星服务装置100时,例如,当吊舱102自由飞行并且使用吊杆上的推进器202来修改吊舱102的轨道时,一个或多个附加天线向吊舱102提供通信链路。
94.在一些实施例中,吊舱102的通信装置(例如,通信子系统224)可以接收与目标航天器20(图1a)的轨道或速度中的至少一个有关的数据(例如,与航天器20的动量有关)。这样的数据可以从远离吊舱102的位置通过一个或多个通信信道(例如,直接地或间接地通过地面站,卫星中继器,直接传送和/或电连接(例如,直接地从目标航天器20))传送或以其它方式转移到吊舱102。这样的数据可以包括针对有关的燃烧的计算,并且/或者吊舱102的系统可以基于该数据执行针对燃烧的计算。在一些实施例中,遥测数据可以直接地或间接地通过地面站从目标航天器20提供给吊舱102(例如,通过射频链路)。在一些实施例中,遥测数据可以直接地或间接地从目标航天器20、航天器服务装置100中的一个或多个或者从地面站提供给吊舱102。
95.在一些实施例中,遥测数据可以在闭环系统中以选定的时间间隔更新,并且可以基于更新的数据来计算随后的燃烧。
96.在一些实施例中,预定的燃烧时间表可以提供给吊舱102或系统10的另一部分。
97.在一些实施例中,吊舱102包含机载功能,其包括用于确定吊舱102在轨道时的范围、位置和/或速度的任何合适的技术。在一些实施例中,吊舱102的通信子系统224可以提供测距功能,使得吊舱102的轨道位置可以借助地面系统使用标准测距技术被精确地确定。在一些实施例中,吊舱102可以包含机载gps转发器,无论吊舱102是否自由飞行、附接至卫星服务装置100或主机航天器20,所述机载gps转发器都提供吊舱102的精确轨道位置和速度。在一些实施例中,吊舱102可以使用光学轨道确定(例如,经由照相机或其它合适的装置)。在一些实施例中,由操作者(例如,人员和/或计算机)在地面上使用轨道范围、位置和/或速度数据以计算新的推进器燃烧时间表,其经由通信子系统224上传到吊舱。在一些实施例中,在吊舱102上机载的计算机使用轨道位置和速度数据来计算新的推进器燃烧时间表。在一些实施例中,由地面或吊舱计算出的推进器燃烧时间表可以用于在吊舱附接至主机航天器20的情况下修改吊舱的轨道,以达到寿命延长或轨道修改的目的。在一些实施例中,由地面或吊舱计算出的推进器燃烧时间表用于在吊舱未附接至主机航天器20或卫星服务装置100的情况下修改吊舱的轨道。
98.在一些实施例中,吊舱102可以使用与从地面上传的数据或由吊舱102上的传感器生成的数据结合的其机载生成的轨道位置和速度数据,以便计算出推进器燃烧时间表,所
述推进器燃烧时间表用于相对于在轨的另一天体修改吊舱位置和取向。在各种实施例中,吊舱102可以相对于在轨的另一天体修改其位置或取向以与卫星服务装置100会合;避免与另一个在轨天体发生碰撞;相对于另一个吊舱102、卫星服务装置100或在轨的另一天体进行空间站保持轨道维护;并且当附接至主机航天器20时进行主机航天器20相对于空间中的一个或多个其它天体的空间站保持。
99.在一些实施例中,吊舱102会缺乏用于确定吊舱102和/或目标航天器20的遥测数据(例如,速度、姿态、动量、位置、轨道等)的任何独立系统,并且会需要依赖用于此类信息的外部源(例如,目标航天器20、地面站、服务母舰装置100)。
100.吊舱102可以在一个时间段(例如,八到十二小时的时间段)内存储遥测数据,并且当在选定的时间表上(例如,每天两次或三次)被轮询时将该数据返回到通信网络。总数据集可以是相对小的,导致相对短的接触时间,这为在多年的时间上操作多个吊舱102提供了相对低的成本足迹。在一些实施例中,吊舱102可以被定位在目标航天器20(图1a)的非面对地球的一侧上。为了向地面站天线和/或绕行通信服务提供视线,收发器天线208可以被定位在运载推进器组件200的同一吊杆上以提供清晰的视线。考虑到吊舱102的部件的地球同步轨道范围和低功率性质,连同相对适中的增益天线208一起,吊舱102可以以相对低的数据速率(例如,小于1kb/s,小于几kb/s)传来和返回数据。因此,吊舱102能够接收有限的命令集,以根据由航天器20的航天器操作者从地球指定的调整来调整其推进时间表和吊杆指向。
101.在一些实施例中,系统10(图1a)的一个或多个部分(例如,吊舱102)可以利用柔性频率收发器,其可以使吊舱102能够与航天器20相关联的地面站进行通信。通过使用柔性频率收发器并且通过使用用于航天器20的现有的地面系统,吊舱102可以不要求任何额外的监管机构许可或第三方服务来在吊舱102和用于航天器20的地面站之间建立命令和遥测连接。这可以使航天器20的操作者能够在几乎没有必要的监管披露或许可的情况下以相对最小的附加投资来对吊舱102建立控制(例如,完全控制)。考虑到用于目标航天器20的市场基础包括利用c波段和ku波段rf频率以用于通信的相对大量的航天器20,发射的吊舱102可以被配置有c波段或ku波段收发器。发射前的协调可以建立吊舱102与将在初始能力上或在再供给航天器中发射的基于c波段或ku波段的通信系统的比率。如果目标航天器20不利用c波段或ku波段通信,则吊舱102可以被配置为实施与目标航天器20的类型基本匹配的通信系统的类型,或者c波段或ku波段吊舱102仍可以与具有不同类型的通信系统的目标航天器20一起使用。在一些实施例中,吊舱102可以在选择的时间段(例如,八到十二小时)内存储其遥测数据,并且可以当被轮询时(例如,每天两次或三次)将该数据返回到通信网络。
102.在一些实施例中,由于可以基于在轨的目标航天器20来修改柔性频率收发器的频率(例如,利用由目标航天器20所利用的频率的一个或多个波段的未使用部分),所以柔性频率收发器可以使吊舱102能够与各种目标航天器20配对。在一些实施例中,包括在吊舱102中的柔性频率收发器能够实现在多个附近吊舱和/或吊舱102与其它附近航天器之间的频率去冲突。这种能力可以使吊舱102能够维持与地面的高效且无冲突的通信,而吊舱102都不附接至卫星服务装置100、再供给装置30或主机航天器20。
103.在一些实施例中,吊舱102与航天器服务装置100之间的空间对空间的命令和遥测链路可以被实施为利用航天器服务装置100的相对较大的增益和功率来将吊舱102连接至
航天器20的地面系统。在一些实施例中,该技术可以在航天器服务装置100与吊舱102非常接近的同时被采用并且/或者可以被植入以用于长期操作,其中吊舱102推进器燃烧时间表可以仅需要偶尔调整(例如,每周、每月或更长时间间隔执行调整)。
104.在一些实施例中,吊舱102的通信系统可以使用收发器,所述收发器被设计为利用吊舱102的天线与航天器20的上行链路天线的紧密接近以将来自吊舱102的扩频遥测信号馈送到航天器20的上行链路中。然后,该信号由航天器20的通信系统接收高增益提升以将遥测从吊舱102发送到地面。
105.本文公开的吊舱102中的各种通信系统可以使得能够几乎实时地监测吊舱102的功能和从吊舱102获得的结果,而仅由于从地球同步轨道到地面的光速而存在时间滞后。这样的配置可以使吊舱102能够执行许多功能(例如,诸如上述的那些功能),其中那些功能可以将性能数据返回到地面站。地面站中的以及目标航天器20或吊舱102中的软件也可以用于以光速滞后“闭合环路”,使得来自吊舱102或目标航天器20的数据可以被递送到与目标航天器20或吊舱102相关联的软件中以控制目标航天器20。在一些实施例中,吊舱102可以不需要直接与接纳吊舱102的航天器20通信,并且可以经由通过地面站的光速往返航程时间滞后与航天器20通信。在这样的实施例中,能够为复杂的功能“闭合环路”,所述复杂的功能可以以吊舱102航天器服务的形式提供。例如,该复杂的功能可以包括以下能力:使用来自航天器20的遥测数据,借助驻留在地面软件或吊舱软件中的万向节控制逻辑,利用吊舱102的推进器组件200来管理航天器20的三个动量轴线。
106.为了将吊舱102部署和附接至另一个航天器20(图1a)上,吊舱102可以包括附接特征部(例如,联接机构226,其被配置为用于对目标航天器20进行对接、靠泊、附接、保持或其组合中的一项或多项),所述附接特征部被配置为附接至航天器20和/或一个或多个可以由航天器服务装置100(图2a)的特征部(例如,机械手臂122)接合的联接特征部(例如,抓取机构228)。联接机构226可以被可运动地安装到主体201(例如,借助万向节230)。
107.在一些实施例中,吊舱102的推进器组件200可以被定位在多轴致动器系统上(例如,其由多个万向节和/或其它平移或旋转装置限定)。例如,万向节204可以被配置为使推进器组件200沿第一轴线方向运动,并且万向节205可以被配置为使推进器组件200沿与第一轴线方向成横向的第二轴线方向运动。在一些实施例中,万向节204、205可以被并置在推进器组件200处。在一些实施例中,万向节204、205可以由吊杆分离。吊舱102可以包括第三万向节230(例如,用于使主体201相对于航天器20(图1a)旋转),用于相对于航天器主体定位万向节204、205。在一些实施例中,吊舱102可以包括靠近万向节204的第三万向节230(例如,在主体201和吊杆206之间)。这样的第三万向节230可以与万向节204、205协作来起作用以产生三个自由度(例如,三个旋转自由度)。
108.在一些实施例中,抓取机构228可以借助一个或多个结构232来与主体201间隔开,以便与航天器服务装置100(图2a)的机械手臂122联接。
109.吊舱102可以包括用于将吊舱102固定至航天器服务装置100(图2a)的机构。例如,吊舱102可以包括与航天器服务装置100的一部分联接的装载机构234(例如,其可以借助结构232来与主体201间隔开)。在其它实施例中,以上现有的特征部中的一个或多个(例如,联接机构226和/或抓取机构228)或另一特征部可以用于将吊舱102固定至航天器服务装置100。
110.如上所述,吊舱102可以被配置为例如在与航天器20的控制系统分离(例如,未与其通信)的同时将轨道速度的变化(例如,站位保持、重新定位、eol处置)递送到航天器20(图1a)。换句话说,吊舱102单独可以在附接至航天器20但不与航天器20的控制系统通信的同时改变航天器20的轨迹(例如,轨道)。速度的变化可以从推进器202(例如,离子推进器,霍尔电流推进器,栅状离子推进器,霍尔效应推进器或产生任何合适水平的推力的任何其它合适类型的电力或化学推进器)提供。
111.在一些实施例中,如上所述,吊舱102可以至少部分地起到辅助燃料箱(例如,高压氙气、联氨、氦气、四氧化二氮(nto)、绿色推进剂、其组合或任何其它合适燃料的箱)的功能,所述辅助燃料箱被联接至航天器20(例如,图1a)(例如,联接至航天器20的外部)。例如,吊舱102可以包括动力和推进系统210中的此类燃料箱中的一个或多个。在其它实施例中,如下所述,吊舱102可以仅包括燃料箱以及相关联的零件,所述相关联的零件被配置成附接至航天器20并且将燃料箱放置成与航天器20流体连通。
112.在一些实施例中,吊舱102可以本质上仅包括辅助箱系统,并且可以不包括上述部件中的大多数或任一个。这样的辅助箱系统吊舱102可以包括用于初始对该系统加压的服务阀、用于装备和附接至航天器的机械支撑件、抓取附件和/或被动热控制。在一些实施例中,可以使用部署装置(例如,机械手臂)将辅助箱系统吊舱102放置在其目的地处,该目的地可以被协作地设计成接纳或不接纳该箱。用于该转移箱系统吊舱102的目标航天器20可以具有用于气体和流体转移的协同设计的接口,或者,当航天器20没有上述这样的接口时,辅助箱吊舱102可以包括如下接口,即,所述接口被配置为适应于在这样的航天器20上的配件的各种尺寸和配置。
113.图4是吊舱102的简化示意图,所述吊舱102在第一配置300中以第一推力矢量方向301附接至航天器20并且在第二配置302中以第二推力矢量方向303附接至航天器20。参照图3和图4,万向节204、205、230可以提供选择数量的自由度(例如,两个自由度,三个自由度),用于将推力矢量指向穿过航天器20的质心。推力可以基于航天器20在轨道上的初始位置根据命令(例如,来自远程地面站)和/或根据时间表(例如,预定的时间表和/或主动发送到吊舱102的时间表)来产生,并且可以降低或甚至去除来自航天器20的推进子系统的站位保持和动量卸载的负担。在一些实施例中,推力的量和/或推力矢量可以根据任何期望的时间表经由至吊舱102的通信链路发送到吊舱102。
114.如在提供第一推力矢量方向301的万向节204、205、230的第一配置300(例如,三个旋转自由度)中所示,可以沿主要为南方的方向或沿与航天器轨道方向反垂直(anti
‑
normal)的方向施加推力。类似地,如在提供第二推力矢量方向303的万向节204、205、230的第二配置302中所示,可以沿主要为北方的方向或沿与航天器轨道方向垂直的方向施加推力。如在图4中所示,每个配置都可以包括在轨道速度的正方向或负方向上的推力矢量的分量。如图5中所示,在每种配置(例如,向南和向北)中的推力矢量也具有相当大的在航天器的轨道径向上的分量。在推力矢量和燃烧持续时间中的轻微变化根据命令(例如,来自远程地面站)和/或根据时间表(例如,预定的时间表和/或主动发送到吊舱102的时间表)用于执行航天器20的站位保持以及动量调整,如下面所讨论的。在一些实施例中,可以在轨道中的不同时间下在航天器周围的不同位置处施加推力矢量,以优化航天器轨道元件的控制以及航天器动量的管理。
115.来自吊舱102的该附加推力可以将来自航天器20的推进剂消耗的速率降低了例如90%或更高,直至100%,并且从而起到延长航天器20的任务寿命的作用。
116.考虑到通常无法提供推力来完全地消除在单个激活周期(即,燃烧)期间的航天器20的轨道元件的漂移,吊舱102可以在每个推进器激活周期在航天器20上诱导在一个或多个轨道方向(例如,轨道径向方向,垂直方向,反垂直方向,平面内方向)上的较小方向速度,并且通过多个激活周期的组合来实现对航天器20的所有轨道元件的控制。例如,针对在一次轨道旋转内选定的间隔(例如,一天中的两个十二小时的时间段)并且针对在一周、两周、三周、一个月或更长时间的时间段内的不同轨道旋转,可以计划吊舱102的推进时间表。这样的时间表可以提供成对的推进器燃烧部和相关联的万向节角度,其产生速度变化,所述速度变化控制一些或所有轨道元件并且与速度变化的同时或与速度变化分开地调整航天器动量。
117.图5提供吊舱102的另一个简化示意图(例如,从图4中的视图旋转了90度),所述吊舱102在第一配置304中以第一推力矢量方向305附接至航天器20并且在第二配置306中以第二推力矢量方向307附接至航天器20。参照图3和图5,万向节204、205可以提供两个自由度,用于将推力矢量305、307指向穿过航天器20的质心158。如图所示,针对在一天中以十二小时为间隔的两个时间段(或者为目标航天器20提供期望的结果的任何时间间隔),可以计划吊舱102的推进时间表。这样的时间表可以提供成对的推进器燃烧部305、307,其产生速度变化,所述速度变化可以彼此抵消或者被用于控制航天器轨道的偏心率。
118.在一些实施例中,推进命令和/或时间表可以发展并且传达到吊舱102,以便至少部分地基于航天器20的特征来提供航天器20的期望轨道、位置和/或速度。
119.在一些实施例中,吊舱102的联接部分310(例如,包括对接机构,诸如上述的可扩展的对接机构160)可以包括可运动的(例如,可旋转的)关节。例如,可旋转的联接部分310可以将吊舱102固定至目标航天器20(例如,通过抵靠目标航天器的发动机314的一部分楔入),同时使吊舱102能够相对于目标航天器20旋转。这种配置可以使推进器吊杆手臂312具有一定的自由度(例如,消除了对诸如第三万向节230(图3)的单独的可运动的关节的需要),并且消除了对于两个或更多个推进器万向节组件的需求。
120.图6是航天器服务系统的再供给装置(例如,航天器服务系统10(图1a)的再供给装置30)的简化示意图。如图6中所示,再供给装置30可以包括附接至结构400(例如,espa环)和/或容纳在所述结构400(例如,espa环)内的多个吊舱102。在一些实施例中,每个吊舱102都可以包括用于联接至结构400的相应的附接机构401。结构400可以包括多个联接器。例如,第一联接器402和第二联接器404用于连接至运载火箭的有效载荷和/或运载火箭自身中的一个。结构400可以包括总线406,所述总线406包括用于对再供给装置30控制、监测、供以动力等的一个或多个航天器系统。结构400可以包括抓取特征部408(图4),其被配置为用于与系统10(1a)的另一部分(例如,航天器服务装置100(图2a))联接。例如,抓取特征部408可以包括可以与航天器服务装置100的机械手臂122联接的结构(参见图2a)。在一些实施例中,再供给装置30的结构可以包括分离环和/或航天器发动机的模拟特征部(例如,类似地成形和/或配置的结构),使得航天器服务装置100可以与再供给装置30的所述结构对接。
121.在一些实施例中,再供给装置30的结构可以是完全无源的(例如,不包括有源航天器总线系统406或探线特征408的espa环)。在这样的实施例中,吊舱102可以在除了航天器
服务装置100的轨道以外的某个轨道上从再供给装置30释放。吊舱102可以不从再供给装置30接收任何动力、热或数据服务。例如,吊舱102可以在发射之前和发射期间供以动力,或者可以直到从再供给装置30释放才不供动力。
122.图7至图10示出根据本公开的一个或多个实施例的航天器服务装置的各种实施例,所述航天器服务装置包括联接至所述航天器服务装置的多个吊舱。如图7所示,航天器服务装置500可以由一个或多个环形结构502(例如,两个彼此轴向堆叠的espa环)限定。吊舱102可以联接在环形结构502周围(例如,在至少两个吊舱102的堆叠中围绕环形结构502联接)。例如,吊舱102可以被联接至围绕环形结构502限定的每个端口。工具(例如,机械手臂506)可以联接至环形结构502之一(例如,在环形结构502的一个侧上的径向延伸的表面)。
123.如图8所示,航天器服务装置500可以具有围绕环形结构502联接的吊舱102的不同配置。例如,吊舱102可以联接至围绕环形结构502限定的每个端口。第二排吊舱102可以联接至相应的吊舱102,所述相应的吊舱102被定位成靠近(例如,邻近和/或联接至)环形结构502。又一组吊舱102可以被定位(例如,联接)在从环形结构502延伸的多组吊舱的两个吊舱102之间。在一些实施例中,可以在吊舱102之间提供选择的间隙的量(例如,包括没有间隙)。在一些实施例中,最靠外的吊舱102可以被配置为定位在运载火箭的一部分(例如,有效载荷整流罩)的直径内、延伸至所述运载火箭的一部分(例如,有效载荷整流罩)或延伸超出所述运载火箭的一部分(例如,有效载荷整流罩)。
124.如图9所示,航天器服务装置500可以具有围绕环形结构502联接的吊舱102的不同配置。例如,吊舱102可以联接至围绕环形结构502限定的每个端口,但是与所述端口间隔开。第二排吊舱102可以定位成邻近(例如,联接至)相应的吊舱102,所述相应的吊舱102被定位成靠近环形结构502。又一组吊舱102可以被定位(例如,联接)在从环形结构502延伸的多组吊舱的两个吊舱102之间。
125.如图10所示,航天器服务装置500可以具有围绕环形结构502联接的吊舱102的不同配置。例如,选定数量的吊舱102(例如,三个吊舱102)可以联接至围绕环形结构502限定的每个端口。第二排吊舱102可以定位成邻近(例如,联接至)相应的吊舱102,所述相应的吊舱102被定位成靠近环形结构502。又一组吊舱102可以被定位(例如,联接)在每个相应的吊舱102的任一侧上,所述相应的吊舱102被定位成靠近环形结构502。
126.图11示出航天器服务系统10的另一种配置,其可以类似于并且包括以上讨论的那些的各种特征和操作。然而,图11中的配置可以包括一个或多个自由飞行的吊舱102,其被配置为部署在轨道上(例如,从地球通过运载或发射航天器50或结构部署在轨道上,所述运载或发射航天器50或结构可以与航天器服务装置100和/或上述的再供给装置30类似或相同),以待运输到目标航天器20(例如,在吊舱102的动力下或通过另一航天器),并且继而服务于目标航天器20(例如,通过联接至目标航天器20)。
127.如图11中所示,系统10可以包括主机或运输飞船(例如,运载航天器50),所述主机或运输飞船将一个或多个吊舱102递送到不同于(例如,低于)期望的最终轨道的第一初始轨道,例如,基本地球同步轨道。例如,初始轨道可以至少部分地由地球同步轨道包围或处于地球同步轨道内(例如,初始轨道的大部分比地球同步轨道的大部分更靠近地球)。在一些实施例中,初始轨道可以包括低地球轨道(leo)、中地球轨道(meo)、极地静止轨道、地月
轨道或其它轨道。
128.如上所述,在一些实施例中,吊舱102可以包括推进系统,所述推进系统用于独立地行进(例如,用于从运载航天器50行进到接近目标航天器20或另一个航天器的位置,所述另一个航天器被配置为将吊舱102递送到目标航天器)。在其它实施例中,吊舱102会完全地缺乏它们自己的推进系统或缺乏用于使吊舱102独立于另一个航天器运动的推进系统(例如,其中在吊舱102上的任何推进力用于调整目标航天器20的轨道而不是用于使吊舱102独立地行进)。
129.在一些实施例中,吊舱102可以利用吊舱102的机载能力(例如,如上文和下文描述的)以在吊舱102从运载航天器50释放之后修改它们的轨道,使得吊舱102被预先定位以用于由相同或不同的航天器(例如,卫星服务装置100、运载航天器50、再供给航天器30)捕获,所述相同或不同的航天器现在所处的位置如与当吊舱102被递送到第一初始轨道的时候运载航天器50所处的位置相比相对更靠近目标航天器20(例如,接近地球同步轨道)。在吊舱102缺乏用于预先定位的系统或装置的实施例中,另一个航天器(例如,航天器服务装置100或再供给装置30)可以从初始轨道取回吊舱102并且将吊舱102运输到基本地球同步轨道。
130.在一些实施例中,吊舱102的预先定位可以以如下方式中的一种或多种方式发生:将吊舱定位在共同位置中,在所述共同位置处卫星服务装置100可以在相对小的轨道变化下收集吊舱(例如,本质上同时);预先定位在未使用的轨道位置中,在所述未使用的轨道位置处没有频率利用率约束并且降低了与其它常驻空间物体或碎片碰撞的可能性;和/或靠近预期的客户航天器20预先定位,使得卫星服务装置100具有较小的轨道变化以从吊舱102捕获来将吊舱102安装在客户航天器20上。
131.在一些实施例中,吊舱102可以用于向卫星服务装置100递送有效载荷。在发射之前,一个或多个吊舱102可以具有附接至吊舱102或集成在吊舱102中的一个或多个有效载荷101(例如,机器人工具),其旨在升级或增强卫星服务装置100的功能能力。在一些实施例中,吊舱102可以与运载航天器50分离,修改其轨道以用于最终由卫星服务装置100捕获,待由卫星服务装置100捕获,并且然后通过包括在卫星服务装置100上的机器人能力将有效载荷101移除。然后,吊舱102可以由卫星服务装置100安装在目标航天器20上。这样的配置可以实现未来对卫星服务系统100的整体能力的升级,而无需发射全新的航天器,同时使吊舱102能够在提供升级之后为目标航天器20提供维护。
132.如图11中所示,吊舱102可以直接地行进到目标航天器20(例如,与目标航天器20联接),或者会需要在被基本预先定位在地球同步轨道上之后被安装在目标航天器20上和/或递送到目标航天器20。例如,吊舱102本身会不能够与目标航天器20独立地对接和/或会合(例如,由于缺乏必要的系统)。在这样的实施例中,吊舱102可以使用其自身的推进力和/或动力来改变其轨道以与卫星服务装置100会合。一旦处于期望的位置,航天器服务装置100就可以使用在航天器服务装置100上的对接机构(例如,如图2b中所示的联接机构152)捕获吊舱102。在捕获之前,吊舱102可以保持在靠近卫星服务装置100或目标航天器20的轨道上,以便减少到达目标航天器20的传输时间。
133.在一些实施例中,吊杆组件(例如,如图3中所示的单个吊杆组件206)上的一个或多个推进器可以用于促进将吊舱102从初始发射插入轨道递送到其预期轨道。如图3中所示,吊舱102可以具有允许一个或多个吊舱102作为主要有效载荷或次要有效载荷被安装在
运载火箭上的所有特征和能力,可选地连同一个或多个有效载荷101一起,如图11中所示。运载火箭(例如,运载航天器50)可以在初始轨道上释放一个或多个吊舱102,所述初始轨道并非是将驻留吊舱102的最终轨道(例如,发生吊舱102的再供给的轨道)。在一些实施例中,吊舱102可以使用其推进系统以修改吊舱102的轨道,使得航天器服务系统100可以捕获吊舱102以用于后来安装在主机航天器20上。在一些实施例中,吊舱102可以使用单个(或多个)推进器吊杆(例如,如图3中所示的吊杆组件206)来修改其轨道。运载航天器50可以将一个或多个吊舱102放在这样的任何轨道上,即,在所述任何轨道处吊舱102具有足够的燃料和动力以创建增量速度(delta
‑
velocity)来将吊舱102轨道修改为期望的轨道。在一些实施例中,吊舱102可以机动到用于捕获(例如,用于安装、用于再供给等)的轨道,这可以发生在正提供寿命延长服务的任何轨道(例如,低地球轨道(leo)、中地球轨道(meo)、地球同步轨道(geo)、极地静止轨道、地月轨道或其它轨道)上。
134.在一些实施例中,附加装置可以作为有效载荷101被包括在吊舱102中,以使吊舱102能够独立地维持或自身操作有效载荷101中的供给物或将其递送到另一个航天器,而同时吊舱102都不附接至再供给装置30、运载航天器50、目标航天器20或卫星服务装置100。在吊舱102的单独或集成的有效载荷101中的这些附加装置可以包括航天器控制和支撑装置的任何合适组合,例如,反作用轮组件、惯性参考单元(例如,陀螺仪)、gps转发器(例如,包括gps天线)、推进器、天线、星体跟踪器和/或附加的太阳能电池。吊舱102可以包括以上在图2a、图2b和图3中的卫星服务装置100或吊舱102中讨论的任何部件。在一些实施例中,吊舱102可以利用一个或多个机载计算机以使用这些附加装置来维持吊舱102在空间中的取向(例如,姿态控制传感器和致动器)、改变速度(例如,推进系统推进器、油箱和燃料)、确定吊舱的轨道(例如,测距转发器或gps转发器)、增大功率以支持这些功能(例如,附加的太阳能电池)并且增强地面通信(例如,补充天线)。
135.由于上述的本公开的实施例仅仅是本公开的实施例的示例,所以上述的和在附图中示出的这些实施例不限制本公开的范围,本公开的范围仅由所附权利要求及其合法等同物来限定。任何等同的实施例都意图处于本公开的范围内。实际上,本公开的各种修改方案,除了本文所示和所述的那些以外,例如,所描述的元件的可替代的有用组合,对于本领域的技术人员而言可以变得显而易见。这样的修改方案和实施例也落入所附权利要求及其合法等同物的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1