一种盖板拆装机构及其基于无人机的森林火灾监测系统的制作方法
本发明涉及无人机和火灾监测技术,特别是涉及一种盖板拆装机构及其基于无人机的森林火灾监测系统。
背景技术:
全世界范围内几乎每年都会发生数十起森林火灾,造成严重的生态破坏及经济损失。而火灾的起因大多是森林中产生的自燃、雷电造成的燃烧,由于森林中充满可燃物及较高的氧含量,因此一旦产生山火其蔓延速度极快,而且很难扑灭,对人们的生命财产造成极大的威胁。
由于森林面积较大、人烟稀少,因此很难及时发现初始的起火点并进行扑灭,这就造成需要火势达到一定规模后才能被人们发现,此时扑灭会付出较大的代价,而且已经造成了很大的损失。
目前虽然后职业护林人员,其通过周期性巡查可以相对较早地发现起火点,结合无人机的使用可以大大增加巡查效率及巡查面积。但是这种方式对人工的依耐性太大,而且由于无人机的续航时间偏短,因此巡查区域无法做到较大的突破,也就是非常偏远的地区还是无法做到有效的巡查。
对此,发明人设计了一种基于无人机的森林火灾监测系统,其通过对森林建立gis地图,然后利用无人机根据规划路线进行自动巡查,并利用机库进行充电续航。
技术实现要素:
有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是提供一种盖板拆装机构及其基于无人机的森林火灾监测系统,其盖板拆装机构能够对电池盖进行快速拆装。
为实现上述目的,本发明提供了一种盖板拆装机构,包括拆装头,拆装头与拆装旋转轴一端装配固定、与拆装升降筒可圆周转动且不可轴向移动装配,所述拆装升降筒另一端穿过拆装升降螺套且与之通过螺纹旋合装配,所述拆装升降螺套上套装有第四充电升降齿,所述第四充电升降齿可与第二充电升降齿啮合传动;所述拆装旋转轴穿出拆装升降筒后穿过拆装轴套且与可轴向滑动、不可圆周转动装配,所述拆装轴套可圆周转动、不可轴向移动地安装在切换转盘上,拆装升降筒与拆装轴套可轴向滑动、圆周转动、卡合装配,所述拆装轴套上套装有第三拆装齿轮,第三拆装齿轮与第二拆装齿轮啮合传动,第二拆装齿轮与第一拆装齿轮啮合传动,所述第一拆装齿轮、第二拆装齿轮分别套装在拆装电机轴、第一充电中间轴上,所述拆装电机轴、第一充电中间轴分别与切换转盘可圆周转动装配,所述拆装电机轴一端装入拆装电机内,切换电机安装在切换转盘上;拆装头上直接或间接设置有拆装插孔,所述拆装插孔可与拆卸柱卡合、可轴向滑动、不可圆周转动装配。
本发明还公开了一种基于无人机的森林火灾监测系统,其应用有上述盖板拆装机构。
本发明的有益效果是:
1、本发明能够通过无人机实现自动巡查,可以实现全自动无人巡查,从而可以及时发现火灾起火点;而利用机库实现无人机的自动充换电续航,从而可以适应于长时间野外巡查作业。
2、本发明的无人机利用图像、热成像图像、空气中的烟雾浓度综合判断火灾隐患或火灾起火点,为后续的火灾预防、火灾扑灭提供精确的指导。
3、本发明的拖车能够对无人机进行定位、拖动,从而在无人机起飞前或降落后能够将无人机拖动至预设位置进行充换电,以实现无人机的自动续航。
4、本发明的充换电模块能够通过直充无线充电器对无人机内置电池进行充电,从而实现续航。同时还能够通过盖板拆装机构拆装电池盖,通过电池装卸机构更换电池,以实现无人机的快速续航,这种设计可以适应于无人机高频巡查的需求。
附图说明
图1是本发明的系统框图。
图2-图6是无人机的结构示意图。其中图4、图6分别是采样动力轴a820轴线所在两个相互垂直中心面处剖视图;图5是图4中f1处放大图。
图7-图12是无人机内部局部结构示意图。
图13-图23是拖车的结构示意图。其中图22是推杆电机轴b241轴线所在中心面处剖视图。
图24-图26是充换电模块、机库底板处结构示意图。
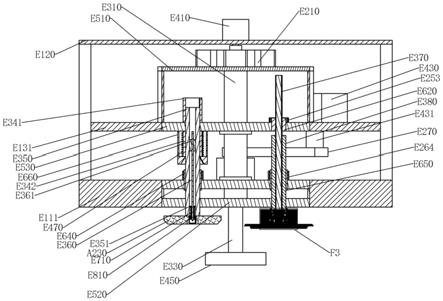
图27-图36是充换电模块的结构示意图。图32是切换转轴e310轴线所在中心面处剖视图;图33是电池升降筒e350轴线所在中心面处剖视图;图34是图33中f2处放大图;图35是拆装升降筒e380轴线所在中心面处剖视图;图36是图35中f3处放大图。
图37-图38是盖板拆装机构的局部结构示意图。
图39是升降斜块e820处结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
本发明的机库、发电模块、监测装置均记载在于本案同日申报的、名为“一种机库及其基于无人机的森林火灾监测系统”的中国发明申请中,可组合参阅该专利申请以达到最佳理解效果。
参见图1,本实施例的森林火灾监测系统,包括:
服务器,用于和无人机、机库通讯,并根据获取的信息判断无人机巡查区域是否存在火灾隐患;
gis地图,通过对巡查区域进行勘测后获得的地图信息,用于为无人机的巡查提供导向、定位;
无人机a,用于通过gis地图导航、按照设定路线进行巡逻,并采集巡查区域的空气、图像、热成像图像信息;
拖车b,用于将停放在机库内的无人机输送至预设位置以进行充电或换电;
机库,用于为无人机提供庇护,同时对无人机进行充换电以实现无人机的自动续航;
监测装置,安装在火灾容易发生的位置,通过火灾燃烧时的温度启动以发出浓烟,从而为无人机的观察提供显眼的标志、定位。
gis地图以数据库、软件的形式分别安装在服务器、无人机的机载工控机上,无人机上还分别安装有云台a220、空气采集装置、机载无线模块、机载定位模块、机载存储器、机载蓝牙,所述云台a220上安装有摄像头、红外热成像仪,所述摄像头用于获取巡查区域的图像,所述红外热成像仪用于获取巡查区域的热成像图像,并通过热成像图像判断巡查区域是否存在火灾隐患。所述空气采集装置用于获取巡查区域的空气样本,然后通过分析空气样本中的可燃气体、烟雾浓度就能判断空气采集点是否存在火灾隐患。机载无线模块用于和服务器、机库无线模块无线通信,从而可以实现在服务器端远程操控无人机,无人机将采集的信息输送、存储在机库无线模块上。本实施例的机载无线模块可以选用5g模块、gprs模块等。机载定位模块用于无人机的定位,本实施例可以选用北斗定位模块、gps定位模块等。机载存储器用于存储无人机采集的数据,本实施例可选用硬盘、sd卡、tf卡等。机载蓝牙用于可机库蓝牙无线通信,从而可以实现无人机与机库之间快速传输数据。机载工控机分别与摄像头、红外热成像仪、机载无线模块、机载定位模块、机载存储器、机载蓝牙通信连接,摄像头、红外热成像仪、机载无线模块、机载定位模块获取的数据实时存放在机载存储器内。
机库内安装有:
机库无线模块,用于和服务器、机载无线模块无线通信,从而实现数据传输;
机库蓝牙,用于和机载蓝牙无线通信。由于在巡查区域覆盖的网络速度较慢,因此不能直接采用机载无线模块和机库无线模块传输数据。而采用机库蓝牙可以大大增加传输效率,从而将无人机的数据快速输送至机库存储器存储,机库无线模块通过网络将数据解析、压缩后打包输送至服务器即可。
机库工控机,用于收发、解析指令并进行参数计算和程序运行,同时控制机库的电气设备;
机库存储器,用于存储数据;
流量计,用于探测空气样本的流量;
烟雾传感器,用于探测空气样本的烟雾浓度;
可燃气体传感器,用于探测空气样本的可燃气体浓度;
充换电模块,用于对无人机进行充电续航或更换无人机电池以实现续航。
所述机库工控机分别与机库无线模块、机库蓝牙、机库存储器、流量计、烟雾传感器、可燃气体传感器、充换电模块通信连接。优选地,为了降低机库无线模块箱服务器发送数据的压力,可以在机库工控机内内置用于识别巡查图像、巡查热成像图像的软件,从而结合无人机采集的空气样本信息判断无人机巡查区域是否存在火灾隐患,并将达到预警阈值的信息打包输送至服务器,从而大大降低机库向服务器传输的数据量。这种方式也能大大增加整个系统的准确性和稳定性。所述监测装置在遇到火灾时会发出大量浓烟,无人机巡查时通过采集大量浓烟的图像即可确定起火位置,为后续的火灾扑灭提供精确定位。
使用时,摄像头采集的图像可以直接观察到起火、浓烟位置,而热成像图像携带有起火处的温度信息,从而可以判断起火区域的大小。空气样本的可燃气体浓度可以直接反应火灾容易起火的程度,从而起到火灾预警的效果。而烟雾浓度可以反应是否存在火灾,从而在起火点被遮挡造成热成像图像未采集到温度数据时作为辅助证据,也作为起火位置、火势大小的判断证据之一。而监测装置通过内置的烟饼发出大量浓烟,这部分浓烟通过无人机采集或观察到也能起到准确的定位效果。通过准确的定位可以为后续的扑灭工作提供指导,从而可以有效防止火势蔓延以及提高扑灭效率。
参见图2-图12,所述无人机a包括机体a110,机体a110上安装有旋翼架a120,旋翼架a120上安装有旋翼a210,使用时旋翼a210旋转从而带动整个无人机起降、飞行。所述机体a110底部安装有起落架a130,起落架a130内设置有起落架槽a131,起落架槽a131内安装有起落架板a132,所述起落架a130底部安装有机载支架a140。所述机体a110底部安装有三轴的云台a220,云台a220上安装有摄像头、红外热成像仪。
所述机体a110内安装有设备壳a530,设备壳a530内部中空且两端开口,设备壳a530底部通过机载底盖a560封闭、顶部通过电池盖a510封闭,所述电池盖a510顶部安装有拆卸柱a520,拆卸柱a520的横截面为多边形且其侧壁上设置有拆卸环槽a521;所述电池盖a510底部安装有旋合部分a511,旋合部分a511装入设备壳a530内且与之通过螺纹旋合装配。所述设备壳a530内部由上至下依次安装有电池隔板a540、第一采样隔板a551、第二采样隔板a552、第三采样隔板a553,所述电池隔板a540将设备壳a530内侧顶部分割为电池腔,电池腔内安装有电池a230,电池a230的顶部安装有机载无线充电接收器、充电电路,从而可以通过机库无线充电发射器向机载无线充电接收器发射无线充电磁场以对电池实现无线充电。
所述电池a230上设置有第一电池孔a231、第二电池孔a232,所述第一电池孔a231、第二电池孔a232一端相互连通,且第一电池孔a231、第二电池孔a232另一端分别贯穿电池a230,所述第一电池孔a231的内径小于第二电池孔a232的内径且第一电池孔a231位于第二电池孔a232上方,这种设计主要是为了方便后续电池装卸机构对电池进行装卸。
所述第一采样隔板a551、第二采样隔板a552、第三采样隔板a553上安装有空气采集装置,空气采集装置包括安装在第一采样隔板a551上的采样架a570,采样架a570上安装有采样顶板a571、采样滑轨a572,所述采样顶板a571上安装有采样升降电机a240,所述采样滑轨a572与采样滑槽a581卡合、可滑动装配,所述采样滑槽a581设置在采样升降架a580上,采样升降电机a240的输出轴与采样升降螺杆a810一端通过联轴器连接,采样升降螺杆a810另一端穿过采样升降架a580且与之通过螺纹旋合装配,采样升降电机a240启动后能够带动采样升降螺杆a810圆周转动,从而驱动采样升降架a580沿着采样滑轨a572升降。所述采样升降架a580上安装有采样电机a250,所述采样电机a250的输出轴与采样动力轴a820一端通过联轴器连接,采样动力轴a820另一端穿过采样升降筒a830后装入采样气腔a621内且与采样轮盘a710装配,所述采样轮盘a710上安装有采样叶片a711,采样电机a250启动后能够驱动采样动力轴a820圆周转动,从而带动采样轮盘a710圆周转动,采样轮盘a710通过采样叶片a711转动在采样气腔a621内产生气压差,从而形成气流。所述采样气腔a621设置在采样气壳a620内,所述采样升降筒a830一端与采样气壳a620装配、另一端穿过采样旋转筒a840后与采样升降架a580装配固定。
所述采样旋转筒a940与第一采样隔板a551可圆周转动、不可轴向移动装配,所述采样旋转筒a940上套装有采样盒a420、采样槽轮a910,采样盒a420分别与第二采样隔板a552、第三采样隔板a553可圆周转动、不可轴向移动装配,所述采样槽轮a910上设置有采样弧槽a912、采样动力槽a911,所述采样弧槽a912、采样动力槽a911间隔且均匀分布在采样槽轮a910圆周方向上,所述采样弧槽a912与采样动力轮a920卡合、可圆周转动装配,所述采样动力轮a920上安装有采样动力块a930,采样动力块a930上安装有采样动力销a850,所述采样动力轮a920套装在分度电机轴a261上,分度电机轴a261一端穿过第一采样隔板a551后装入分度电机a260内,分度电机a260启动后能够带动分度电机轴a261圆周转动,从而带动采样动力销a850转动,采样动力销a850转动时会逐渐装入其中一个采样动力槽a911内然后驱动采样槽轮a910转动,最后退出此采样动力槽a911。这种设计一方面可以实现采样槽轮a910的等角度旋转,另一方面能够在采样槽轮转动到位后通过采样动力轮a920与采样弧槽a912卡合以防止采样槽轮a910转动,形成自锁功能。
所述采样盒a420内沿着其圆周方向上设置有多个采样安装槽a421,每个采样安装槽a421的两端分别设置有贯穿的采样通孔a422,所述采样安装槽a421内安装有采样气囊a430,采样气囊a430具有收缩弹性且内部中空,采样气囊a430底部为气囊安装板a431,气囊安装板a431安装在采样安装槽a421的内侧底面上,初始状态时,采样气囊a430为收缩状态,其内部没有气体。位于底部的采样通孔a422内安装有采样气嘴a440,采样气嘴a440顶部与气囊安装板a431装配,采样气嘴a440内部分别设置有气嘴进气孔a441、气嘴连接孔a442、气嘴排气孔a443、气嘴密封孔a444,所述气嘴密封孔a444、气嘴进气孔a441、气嘴连接孔a442、气嘴排气孔a443由下至上依次连通,所述气嘴进气孔a441、气嘴排气孔a443的内壁上分别设置有气嘴进气槽a4411、气嘴排气槽a4431,所述气嘴连接孔a442、气嘴排气孔a443、气嘴密封孔a444分别与气嘴密封筒a460、气嘴排气头a461、气嘴密封头a465卡合且密封装配,所述气嘴排气头a461、气嘴密封头a465分别设置在气嘴密封筒a460的两端,所述气嘴密封筒a460内部为中空的过气通道a462,所述过气通道a462位于气嘴连接孔a442的两端分别与密封通槽a464、密封过气孔a463连通,所述密封通槽a464、密封过气孔a463分别贯穿气嘴密封筒a460,所述气嘴密封筒a460位于气嘴进气孔a441和气嘴密封头a465之间的部分上套装有气嘴弹簧a470,所述气嘴弹簧a470用于对气嘴密封筒a460施加下压的弹力,从而保持气嘴密封头a465与气嘴密封孔a444密封装配、气嘴排气头a461底端面与气嘴排气槽a4431的底端面压紧密封。所述气嘴密封孔a444底部外侧安装有导向套a450,导向套a450安装在采样盒a420上,使用时,采样套a420用于引导插接管a630插入。
所述采样气壳a620的采样气腔a621位于采样轮盘a710的两侧分别与采样气管a610一端、插接管a630一端连通,所述插接管a630安装在采样气壳a620上。所述采样气管a610具有伸缩性,本实施例采用弹簧管,且采样气管a610另一端装入采样孔a561内,采样孔a561设置在机载底盖a560上。
图11为初始状态时,此时插接管a630没有装入导向套a450内。需要采样时,分度电机a260启动,从而驱动采样盒a420圆周转动,使得用于容纳空气样本的采样气囊a430与插接管a630轴向正对;启动采样升降电机a240,驱动采样升降架a580上移,从而带动采样气壳a620上移直到插接管a630插入气嘴进气孔a441,此时插接管a630推动气嘴密封头a465进入气嘴进气孔a441,采样气腔a621与采样气囊a430内部连通。启动采样电机a250,采样电机a250驱动采样轮盘a710圆周转动从而对采样气管a610产生抽吸力,这个抽吸力将外部空气吸入采样气腔a621,然后输送至采样气囊a430内存储,采样气囊a430在气压的作用下逐渐膨胀,直到采样完成。采样升降电机a240反转,驱动采样气壳a620下移复位,此时气嘴密封头a465自动复位以封闭气嘴密封孔a444,从而完成此次采样操作,并准备下一次采样。本实施例设置了多个采样气囊,因此可以实现多次、多点采样,以增加巡查精度,另外采用采样盒旋转切换采样气囊的方式,不仅结构简单,而且结合采样槽轮能够实现插接管a630与采样气囊的准确定位。在经过第一次采样后为了避免采样气腔、采样气管内的残余空气污染后续空气样本,可以在下一次采样时先启动采样电机从而将采样气腔、采样气管内的残余空气排出,然后再进行采样即可。
参见图13-图23,所述拖车b包括底盘b110、四个托举臂b310,底盘b110底部安装有至少四个麦克纳姆轮b250,每个麦克纳姆轮分别通过独立的电机驱动,从而可以实现拖车b的前进、后退、侧移、转向等;底盘b110内侧安装有底盘隔板b111;所述底盘b110上安装有底盘导向筒b410,底盘升降筒b410内部与底盘升降杆b420一端卡合、可轴向滑动装配,所述底盘升降杆b420另一端安装在第一升降板b121上,所述第一升降板b121还与推杆电机b240的推杆电机轴b241一端装配,推杆电机b240启动后能够驱动推杆电机轴b241轴向伸缩,从而带动第一升降板b121同步升降。
所述第一升降板b121上安装有称重传感器b260,所述称重传感器b260的输入轴b261与第二升降板b122装配,第二升降板b122的重量直接作用在称重传感器b260上,从而对第二升降板b122进行称重。所述底盘b110上还分别安装有主机箱b231、拖车电池b232,所述主机箱b231内安装有拖车无线充电接收器、拖车工控机、第一拖车摄像头b221、第二拖车摄像头b222,所述拖车无线充电接收器用于接收拖车无线充电发射器发出的充电磁场,从而实现无线充电。所述拖车工控机用于控制拖车上的电气设备。所述第一拖车摄像头b221、第二拖车摄像头b222均用于采集图像,并且采集的图像输送至拖车工控机进行识别,所述第一拖车摄像头b221用于采集机库底板顶面的图像,所述第二拖车摄像头b222用于采集起落架a130的图像以实现拖车相对于起落架的定位。
所述第二升降板b122上分别安装有两块相互平行的拖车立板b130、两块相互平行的拖车侧板b160、拖车张紧板b150,两块拖车侧板b160顶部安装有拖车顶板b140,所述拖车张紧板b150上安装有拖车张紧滑槽b151,拖车张紧滑槽b151与拖车张紧滑块b521卡合、可滑动装配,所述拖车张紧滑块b521设置在拖车张紧块b520上,所述拖车张紧块b520上安装由拖车张紧轴b522,所述拖车张紧轴b522上套装有拖车张紧轮b351,所述拖车张紧块b520与张紧拉簧b510一端装配,张紧拉簧b510另一端与第二升降板b122装配,张紧拉簧b510处于张拉状态。
两个托举臂b310为一对,每块拖车立板b130对应一对托举臂b310,每根托举臂b310包括穿出拖车立板b130的托举定位端b311、装入拖车立板b130内侧的托举移动块b312,所述托举移动块b312套装在托举调宽螺杆b431、托举调宽导杆b432上,所述托举调宽螺杆b431通过螺纹与托举移动块b312旋合装配,所述托举调宽导杆b432与托举移动块b312可轴向滑动装配;所述托举调宽螺杆b431与至少两块对中轴块b323可圆周转动、不可轴向移动装配,所述托举调宽螺杆b431一端穿出其中一块对中轴块b323后与拖车带轮b352装配,中轴块b323安装在对中安装台b321上对中安装台b321上还安装有对中座b322,对中座b322与对中齿条b320一端装配;每对托举臂b310对应一根对中齿条b320、一块对中安装台b321,两对托举臂b310分别对应两根对中齿条b320,两根对中齿条b320分别与对中齿轮b330两侧啮合传动,对中齿轮b330套装在对中齿轴b460上,对中齿轴b460与对中轴架b170可圆周转动、不可轴向移动装配,对中轴架b170安装在第二升降板b122上;所述对中齿轴b460上还套装有对中蜗轮b341,对中蜗轮b341与对中蜗杆b342啮合传动,对中蜗杆b342设置在对中蜗杆轴b440上,对中蜗杆轴b440分别与对中轴架b170、拖车张紧板b150可圆周转动、不可轴向移动装配,所述对中蜗杆轴b440一端与对中电机b280的输出轴通过联轴器连接,对中电机b280启动后能够驱动对中蜗杆轴b440圆周转动,从而带动对中齿轮b330圆周转动,从而带动两根对中齿条b320同步相对靠近或相对远离移动,以实现对起落架的定位。属于一对的两个托举臂b310的托举移动块b312与同一根托举调宽螺杆b431旋合的螺纹旋向相反,这种设计主要是为了托举调宽螺杆b431转动时可以带动属于一对的两个托举臂b310相互靠近或相互远离移动。
拖车皮带b350分别绕过拖车张紧轮b351、两个拖车带轮b352、调宽带轮b353并构成带传动机构,所述调宽带轮b353套装在调宽电机b270的调宽电机轴b271上,所述调宽电机轴b271和与之靠近的拖车侧板b160可圆周转动装配,调宽电机b270启动后能够驱动调宽电机轴b271圆周转动,从而通过拖车皮带b350带动两根托举调宽螺杆b431同步转动。
优选地,对中座b322还可轴向滑动地套装在至少一根对中导向轴b450上,所述中导向轴b450的两端分别安装在两块拖车立板b130上,从而为对中安装台b321的移动提供导向。
机库上安装有机库底板c170,机库底板c170上分别安装有行走引导线c173、降落方向线c172、降落圈线c171,降落圈线c171用于指定无人机起降区域,降落方向线c172用于标定无人机降落朝向,行走引导线c173用于引导拖车行走。在无人机a降落在机库底板上后,拖车启动,通过第一拖车摄像头b221识别行走引导线c173、降落方向线c172、降落圈线c171,从而为拖车b向无人机a移动提供导向,拖车首先沿着行走引导线c173向降落方向线c172移动,直到达到降落方向线c172处;然后通过第二拖车摄像头b222识别起落架a130,拖车进入两个起落架a130之间且两对托举臂b310分别与两个起落架a130的起落架槽a131正对。第一升降板b121下移至最低点,对中电机b280启动,从而启动对中齿轮b341圆周转动以带动两根对中齿条相互远离移动,直到托举定位端b311穿过起落架板a132。调宽电机b270启动,从而驱动两根托举调宽螺杆b431圆周转动以驱动同一对的两个托举臂b310相互远离移动,直到同一对的两个托举臂b310外侧分别与起落架槽a131的内侧贴紧;然后启动对中电机b270,对中电机b270反转,从而带动两对托举臂b310相互靠近移动,直到两对托举臂b310达到预设位移值,此时两对托举臂b310分别实现在托举臂b310长度方向、每对托举臂b310宽度方向上对无人机的定位。启动推杆电机b240,推杆电机b240驱动第一升降板b121上升,两对托举臂b310逐渐将无人机a举起,而举起过程中通过称重传感器探测无人机重量,直到称重传感器探测的重量在预设阈值(无人机实际重量左右)时,判断为无人机被拖车举起。然后拖车b携带无人机a向探测组件移动,直到达到指定位置。拖车b移动时,第一拖车摄像头采集行走引导线图像,从而对其进行导引。
参见图25-图39,所述充换电模块e包括充电架e110,充电架e110上安装有直充无线充电器e450,所述直充无线充电器e450上设置有充电定位孔e451,在行程开关被触发后,充电定位孔e451与拆卸柱a520基本同轴,然后直充无线充电器e450下移使得充电定位孔e451套装在拆卸柱a520上,然后启动直充无线充电器e450对机载无线充电接收器发射无线充电磁场,从而实现对电池a230的无线充电,也就实现了无人机的充电续航。
所述直充无线充电器e450安装在直充升降轴e330上,直充升降轴e330顶部穿过直充螺套e630后装入直充导向管e320,所述直充导向管e320安装在切换转盘e530上,所述直充螺套e630与直充螺套座e521可圆周转动且不可轴向移动,所述直充螺套座e521安装在切换随动盘e520上,所述直充螺套e630与直充升降轴e330通过螺纹旋合装配,直充升降轴e330与直充导向管e320可轴向滑动装配。所述直充螺套e630上套装有第三充电升降齿e263,所述第三充电升降齿e263可与第二充电升降齿e262啮合传动,所述第二充电升降齿e262与第一充电升降齿e261啮合传动,所述第一充电升降齿e261、第二充电升降齿e262分别套装在第二充电中间轴e302、第三充电中间轴e303上,所述第二充电中间轴e302、第三充电中间轴e303分别与充电齿轮架e150可圆周转动装配,所述充电齿轮架e150安装在充电架顶板e111上,充电架顶板e111安装在充电架e110上;所述第二充电中间轴e302上安装有充电升降带轮e271,所述充电升降带轮e271通过充电升降皮带e270与充电升降电机e430的充电升降电机轴e431连接并构成带传动机构,所述充电升降电机e430安装在充电中间架板e131上,所述充电中间架板e131安装在充电中间架e130上,所述充电中间架e130安装在充电架顶板e111上。使用时充电升降电机e430启动从而带动第二充电升降齿e262圆周转动,第二充电升降齿e262带动直充螺套e630圆周转动,直充螺套e630通过螺纹驱动直充升降轴e330轴向移动从而实现直充无线充电器e450的升降。在直充无线充电器e450对电池a230充电完成后,直充升降轴e330携带直充无线充电器e450上移复位,使得充电定位孔e451上移脱离拆卸柱a520。
由于直接对电池a230充电的方式相对较慢,一般充满电至少需要一小时左右,而在任务比较紧急的情况下需要进行连续监测,此时还是采用直接充电的方式显然无法满足高频率起降及监测的需求,对此发明人还设计了换电池功能以解决高频续航的问题。所述切换随动盘e520、切换转盘e530分别与充电架顶板e111、充电中间架板e131可圆周转动且不可轴向移动装配,所述充电中间架板e131的顶面、位于切换转盘e530的外侧安装有旋转护罩e510;所述切换随动盘e520、切换转盘e530分别与切换转轴e310不可相对圆周转动装配,所述切换转轴e310顶部穿出旋转护罩e510后与切换槽轮e210装配,所述切换槽轮e210上设置有切换动力槽e211、切换弧槽e212,切换动力槽e211、切换弧槽e212间隔且均匀分布在切换槽轮e210圆周方向上,所述切换弧槽e212与切换动力轮e220卡合装配,切换动力轮e220可在切换弧槽e212内转动,所述切换动力轮e220安装在切换电机e410的切换电机轴e411上,切换电机e410安装在充电顶架e120上,充电顶架e120安装在充电架顶板e111上。所述切换动力轮e220上安装有切换动力销e221,切换动力销e221可装入切换动力槽e211内从而驱动切换槽轮e210圆周转动。切换电机e410启动后能够驱动切换动力轮e220转动,切换动力轮e220驱动切换槽轮e210间隙性等角度转动,从而带动切换转盘e530、切换随动盘e520同步转动。
所述切换转盘e530、切换动力盘e520上还分别安装有电池装卸机构、盖板拆装机构,所述盖板拆装机构用于拆装电池盖a510,所述电池取放机构用于取放无人机a内的电池a230。所述盖板拆装机构包括拆装头e910,拆装头e910与拆装旋转轴e370一端装配固定、与拆装升降筒e380可圆周转动且不可轴向移动装配,所述拆装升降筒e380另一端穿过拆装升降螺套e650且与之通过螺纹旋合装配,所述拆装升降螺套e650上套装有第四充电升降齿e264,所述第四充电升降齿e264可与第二充电升降齿e262啮合传动;所述拆装旋转轴e370穿出拆装升降筒e380后穿过拆装轴套e620且与可轴向滑动、不可圆周转动装配,所述拆装轴套e620可圆周转动、不可轴向移动地安装在切换转盘e530上,拆装升降筒e380与拆装轴套e620可轴向滑动、圆周转动、卡合装配,所述拆装轴套e620上套装有第三拆装齿轮e253,第三拆装齿轮e253与第二拆装齿轮e252啮合传动,第二拆装齿轮e252与第一拆装齿轮e251啮合传动,所述第一拆装齿轮e251、第二拆装齿轮e252分别套装在拆装电机轴e461、第一充电中间轴e301上,所述拆装电机轴e461、第一充电中间轴e301分别与切换转盘e530可圆周转动装配,所述拆装电机轴e461一端装入拆装电机e460内,切换电机e460安装在切换转盘e530上。切换电机e460启动后能够驱动第三拆装齿轮e253圆周转动,从而驱动拆装旋转轴e370同步转动,也就是驱动拆装头e910圆周转动。所述第四充电升降齿e264与第二充电升降齿e262啮合后,充电升降电机e430启动,从而驱动拆装升降螺套e650圆周转动以驱动拆装升降筒e380轴向移动,从而带动拆装头e910升降。拆装头e910上直接或间接设置有拆装插孔e953,所述拆装插孔e953可与拆卸柱a520卡合、可轴向滑动、不可圆周转动装配。从而在拆装头e910下移后将拆装插孔e953套装在拆卸柱a520上,然后转动拆装头e910即可将电池盖a510从设备壳a530顶部旋出,旋出电池盖a510后就能对电池腔内的电池a230进行取放。
优选地,所述拆装头e910底部安装有旋合头e950,旋合头e950上分别设置有第一伸缩滑槽e951、第二伸缩滑槽e952、拆装插孔e953,所述第一伸缩滑槽e951、第二伸缩滑槽e952分别与伸缩主块e960、伸缩阻退块e962卡合、可滑动装配,所述第二伸缩滑槽e952分别将拆装插孔e953、第一伸缩滑槽e951连通,所述伸缩阻退块e962安装在伸缩主块e960上,所述伸缩阻退块e962可以装入拆卸环槽a521内,从而在轴向上阻止拆卸柱a520滑出拆装插孔e953。
所述伸缩主块e960上安装有主块动力销e963,主块动力销e963卡装入主块弧槽e942且与之可滑动装配,主块弧槽e942设置在主块动力筒e940上,主块动力筒e940内侧设置有与拆装插孔e953同轴且连通的主块容纳孔e942,所述主块容纳孔e942可以套装在拆卸柱a520上。主块弧槽e942倾斜设置在主块动力筒e940的横截面上且其两端距离主块动力筒e940轴线的间距不同。这种设计使得主块动力筒e940转动时能够通过主块弧槽e942带动主块动力销e963沿着其径向移动,从而驱动伸缩主块e960沿着第一伸缩滑槽e951向拆装插孔e953移动,也就是驱动伸缩阻退块e962向拆装插孔e953移动直到伸缩阻退块e962装入拆卸环槽a521内。
所述主块动力筒e940顶部与主块驱动环e920不可相对圆周转动装配,所述主块驱动环e920、主块动力筒e940可圆周转动、不可轴向移动地安装在拆装头e910内,所述主块驱动环e920内侧为中空的驱动内孔e921;所述驱动内孔e921的内壁上设置有驱动弧槽e922,所述驱动弧槽e922沿着驱动内孔e921轴向由上至下倾斜设置,在驱动内孔e921的轴向上驱动弧槽e922的两端不重叠。所述驱动弧槽e922与驱动滚珠e740卡合、可滑动装配,所述驱动滚珠e740可圆周转动地安装在驱动推板e930上,所述驱动推板e930可沿着驱动内孔e921的轴向滑动,所述驱动内孔e921位于其顶部封闭端和驱动推板e930之间的部分上安装有驱动弹簧e730,所述驱动弹簧e730用于对驱动推板e930施加向下推动的弹力,使得初始状态时驱动推板e930位于最底部。
使用时,拆装插孔e953与拆卸柱a520轴向正对,拆装头e910圆周转动且轴向下移,直到拆装插孔e953与拆卸柱a520顶部套装,由于拆卸柱a520顶部设置有倒角,因此此时不会马上驱动拆卸柱a520转动,而会引导拆装插孔e953套装在拆卸柱a520上,随着拆装插孔e953的转动、下移,会使得拆装插孔e953完全套装在拆卸柱a520上,从而带动拆卸柱a520转动,也就带动电池盖a510转动,电池盖转动时会从电池腔顶部向上旋出,而拆装头也会继续轴向下移一定距离,直到拆卸柱a520的顶部与驱动推板e930压紧,随着拆卸柱a520相对于拆卸有上移,拆卸柱a520会推动驱动推板e930克服驱动弹簧e730的弹力上移,驱动推板e930上移时会通过驱动滚珠e740驱使主块驱动环e920转动,主块驱动环e920会带动主块动力筒e940,主块动力筒e940驱动伸缩阻退块e962向拆装插孔e953移动直到伸缩阻退块e962装入拆卸环槽a521内,此时完成了电池盖的拆卸,而电池盖无法脱落,然后拆装头上移复位即可。在安装电池盖时,拆装头带动电池盖a510下移至与电池腔顶部压紧,然后转动拆装头,拆装头驱动电池盖反转旋入电池腔内,直到电池盖旋紧,在此过程中,拆卸柱下移,从而使得驱动推板e930在驱动弹簧的作用下下移,也就带动主块动力筒e940反转,从而驱动伸缩阻退块e962逐渐退出拆卸环槽a521复位。此时可以直接取出拆装头。当然,也可以在旋紧电池盖后拆装头上移,从而使得驱动推板e930在驱动弹簧的作用下下移实现伸缩阻退块e962退出拆卸环槽a521复位。拆卸环槽a521在轴向上的高度至少为伸缩阻退块e962的两倍,从而为拆卸环槽a521、伸缩阻退块e962的相对移动提供空间。
所述电池装卸机构包括电池升降筒e350、抓取头e850,抓取头e850安装在电池升降筒e350底部与抓取头e850装配,所述抓取头e850内侧为中空的抓取腔e851,所述电池升降筒e350穿过电池升降螺套e640后分别装入第二导向管e342、第一导向管e341内且与之可轴向滑动装配,所述电池升降螺套e640与切换随动盘e520可圆周转动且不可轴向移动装配,所述电池升降螺套e640上套装有第五充电升降齿e265,所述第五充电升降齿e265可与第二充电升降齿e262啮合传动,电池升降螺套e640与电池升降筒e350通过螺纹旋合装配。所述抓取头e850可插装入第一电池孔a231、第二电池孔a232且与第一电池孔a231或第二电池孔a232卡合装配。使用时第二充电升降齿e262驱动电池升降螺套e640圆周转动,从而带动电池升降筒e350轴向移动,也就能够带动电池a230同步移动。
所述第二导向管e342、第一导向管e341分别安装在切换转盘e530上,所述电池升降筒e350内可轴向滑动地安装有磁铁柱e361;磁铁柱e361采用永磁体制成,其具有磁性。所述磁铁柱e361套装在解锁杆e360上,解锁杆e360穿过弹簧环e351、抓取弹簧e710后与滑环e810装配,所述弹簧环e351安装在电池升降筒e350的内壁上且与之不可相对轴向移动,所述解锁杆e360位于弹簧环e351、滑环之间的部分上套装有抓取弹簧e710,抓取弹簧e710用于对滑环施加向抓取头e850推动的弹力。所述滑环e810底部安装有至少两个升降斜块e820,所述升降斜块e820上分别设置有解锁斜面e821、升降让位槽e822,所述升降让位槽e822与抓取卡块e830卡合、可滑动装配,所述抓取卡块e830一端可穿出抓取头e850且与之卡合、可滑动装配,所述抓取卡块e830位于抓取腔e851的一端上设置有抓取滑孔e832,抓取滑孔e832与抓取滑杆e840卡合、可轴向滑动装配,所述抓取滑孔e832位于其封闭端和抓取滑杆e840端部之间的部分上安装有抓取弹簧e720,抓取弹簧e720用于对抓取卡块e830施加阻碍其向抓取滑杆e840移动的弹力。所述抓取卡块e830上设置有与解锁斜面e821贴合的配合斜面e831,所述解锁斜面e821和配合斜面e831由上至下、由远离抓取头的轴线一端向靠近抓取头的轴线一端倾斜设置。在升降斜块e820上移时能够通过解锁斜面e821与配合斜面e831的配合驱动抓取卡块e830克服抓取弹簧e720的弹力缩进抓取头内。所述抓取卡块e830远离配合斜面e831的一端上设置有压缩斜面e833,所述压缩斜面e833用于和第一电池孔e231顶部的倒角处贴合以便于将抓取卡块e830压进抓取头e850内,从而使得抓取卡块e830可顺利穿过第一电池孔e231后进入第二电池孔a232,由于第二电池孔a232的内径大于第一电池孔,因此抓取卡块e830会在抓取弹簧的作用下伸出使得抓取卡块e830不能反向进入第一电池孔e231,这就使得电池a230与抓取头e850之间不能相对轴向脱落,以便于抓取电池。
所述第二导向管e342外部套装有线圈e470,线圈e470外部套装有保护管e660,保护管e660安装在切换转盘e530上,线圈e470通电后产生磁场,这个磁场与磁铁柱的磁场同极相对从而产生排斥力,排斥力驱动磁铁柱e361克服解锁弹簧e710的弹力上移,从而带动升降斜块e820上移,升降斜块e820上移后会将抓取卡块e830拉进抓取头e850内,此时可以抓取头e850可以反向拉出第一电池孔a231。
所述直充螺套e630、电池升降螺套e640、拆装升降螺套e650均以切换转盘e530的轴线为中心均匀分布在切换转盘的圆周方向上,所述第三升降充电齿e263、第四升降充电齿e264、第五充电升降齿e265择一与第二充电升降齿e262啮合传动,而随着切换转盘的转动实现第三升降充电齿e263、第四升降充电齿e264、第五充电升降齿e265与第二充电升降齿e262的啮合切换,且第三升降充电齿e263、第四升降充电齿e264、第五充电升降齿e265其中一个与第二充电升降齿e262啮合时,啮合的齿轮对应的直充螺套e630或电池升降螺套e640或拆装升降螺套e650与拆卸柱a520同轴。这种设计利用切换转盘的转动实现工位切换,也就是直充无线充电器e450充电、拆装电池盖a510、拆装电池a230三个工位的切换。
所述充电架e110上安装有切换架e610,切换架e610安装在切换架轴e390上,切换架轴e390穿过充电架顶板e111后与切换架槽轮e230装配;切换架e610上设置有至少两个分布在切换架轴e390圆周方向上的切换架支板e611,所述切换架支板e611上设置有切换架端块e612,所述切换架端块e612上设置有顶部开口的备用电池槽e613,备用电池槽e613用于放置备用的电池a230,充电架顶板e111与备用电池槽e613对应处安装有固定无线充电器e440,备用无线充电器e440用于对与之对应的备用电池槽e613发射充电磁场,此时备用电池槽e613内的电池接收到这个磁场而进行无线充电。
所述切换架槽轮e230上分别设置有槽轮直槽e231、槽轮弧槽e232,所述槽轮直槽e231和槽轮弧槽e232间隔、均匀分布在切换架槽轮e230上,所述槽轮弧槽e232与切换架动力轮e240卡合、可转动装配,所述切换架动力轮e240套装在切换架电机e420的切换架电机轴e421上,所述切换架电机e420安装在充电中间架e130上,所述切换架动力轮e240上安装有切换架动力块e241,所述切换架动力块e241上安装有切换架动力销e242。切换架电机e420启动后能够驱动切换架动力轮e240转动,所述切换架动力轮e240转动时,切换架动力轮e240会逐渐转出槽轮弧槽e232,且此时切换架动力销e242卡装入槽轮直槽e231内并驱动切换架槽轮e230转动,直到切换架动力轮e240转入下一槽轮弧槽e232,此时切换架动力销e242转出槽轮直槽e231。而切换架槽轮e230转动时会通过切换架轴e390带动切换架e610同步转动。切换架e610转动时能够带动不同的备用电池槽e613经过切换随动盘e520下方,此时的备用电池槽e613位于远离拆卸柱a520的一端,从而不会与无人机产生干涉。所述充电架e110位于切换架e610下方的部分上还安装有保护隔板e112,所述保护隔板e112用于防止切换架e610掉落。
初始状态时,至少有一个备用电池槽e613内没有备用的电池,而其它备用电池槽e613内存放有充满电的电池a230。无人机需要换电池时,盖板拆装机构的拆装头e910与拆卸柱a520同轴,盖板拆装机构将电池盖a510拆卸后携带电池盖a510上移复位;然后切换转盘a520转动,将电池装卸机构转动至电池腔上方,电池装卸机构将电池腔内的电池a230取出,然后携带电池a230上移复位;切换转盘转动,从而使得电池装卸机构携带的电池位于没有备用电池的备用电池槽e613上方,电池装卸机构携带电池下移装入此备用电池槽e613内,然后线圈解锁杆上移,使得抓取滑块e830缩进抓取头e850内,电池装卸机构上移,使得抓取头e850上移退出电池a230并复位。切换架e610转动,将有备用电池的备用电池槽e613转动至抓取头e850正下方,电池装卸机构下移,下移过程中抓取滑块e830穿过第一电池孔a231后进入第二电池孔a232,然后电池装卸机构携带备用电池上移复位;却换转盘转动,将电池装卸机构携带至电池腔正上方,电池装卸机构携带备用电池下移装入电池腔后线圈通电,然后抓取头e850上移退出电池并复位;切换转盘转动,驱动盖板拆装机构转动至电池腔正上方,盖板拆装机构携带电池盖下移并旋紧电池腔顶部完成电池的更换。从电池腔取出的电池转入固定无线充电器下方进行无线充电即可,拖车启动将无人机拖动至降落圈线c171处,无人机起飞。
本发明未详述之处,均为本领域技术人员的公知技术。
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
- 还没有人留言评论。精彩留言会获得点赞!