一种空间航天器用消隙锁紧机构驱动控制方法及系统与流程
1.本发明涉及一种空间航天器用消隙锁紧机构驱动控制方法及系统,属于航天器姿态控制领域。
背景技术:
2.旋转关节子系统关联卫星平台和载荷平台,分为机械轴承工况和磁悬浮轴承两种工况,其工况的切换通过卫星平台的消隙机构执行,消隙机构由消隙锁紧机构驱动线路驱动控制。消隙机构属旋转关节分系统重要单机,需要执行正向锁紧和反向解锁两项任务,其正常运行与否直接影响旋转关节分系统的成败。由于消隙机构类单机在结构上存在的塑性变形特性,设计中需重点考虑如何有效避免出现机构卡死的状况。
3.《一种卫星对接锁紧自动控制方法及系统》(cn106005488a公开日2016
‑
10
‑
12)提出了一种卫星对接锁紧自动控制方法及系统,所述控制方法的锁紧执行机构采用电机提供动力,并包括安装在基座上的对目标星的对接环进行抱紧和下压功能的抱紧组件。该方法没有使用在锁紧和解锁过程中可调节驱动力矩大小的控制方法,始终是同一大小力矩,难以避免因结构上的塑性变形造成的卡死现象。
技术实现要素:
4.本发明的技术解决问题是:克服现有技术的不足,针对消隙机构类单机在结构上存在的塑性变形特性,提供了一种空间航天器用消隙锁紧机构驱动控制方法,通过调节电机驱动电流大小,保证在执行正向锁紧任务过程中,机构的驱动力矩始终不大于反向解锁时的力矩,以避免因结构上的塑性变形造成的卡死故障。
5.本发明的技术解决方案是:
6.一种空间航天器用消隙锁紧机构驱动控制方法,调节消隙锁紧机构步进电机在正向锁紧模式和反向解锁模式下的驱动电流大小,使得在执行正向锁紧任务过程中,消隙锁紧机构的驱动力矩始终不大于反向解锁时的力矩。
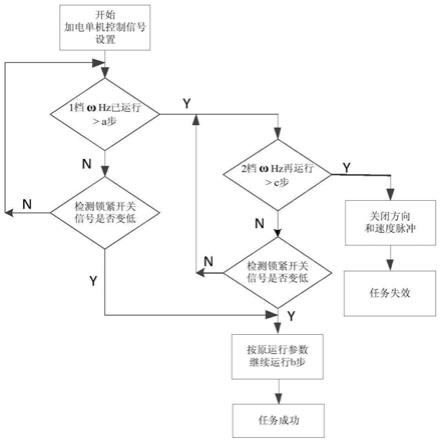
7.进一步的,消隙锁紧机构步进电机在正向锁紧模式时,消隙锁紧机构驱动线路接到数据指令“消隙机构正向锁紧”指令后,以1档电流ωhz频率,正向驱动;
8.若步进电机正向运行a步以内检测到锁紧位置开关输出信号由高变低,则继续正向运行b步;其中a为正常运行时消隙锁紧机构可达锁紧开关位置的步数值加一定的裕度值;b为消隙锁紧机构从锁紧开关位置到锁紧状态位置的步数值;
9.若步进电机正向运行a步后锁紧开关输出信号仍为高,则以2档电流ωhz频率正向驱动;
10.如果在c步以内锁紧开关输出信号变为低,则继续前进b步,否则停止速度脉冲信号输出;其中c为故障检测判断值。
11.进一步的,当消隙锁紧机构步进电机工作在反向解锁模式时,消隙锁紧机构驱动线路接到数据指令“消隙机构反向解锁”指令后,以2档电流ωhz频率,反向驱动;
12.若步进电机反向运行a1步以内检测到解锁位置开关输出信号由高变低,则继续正向运行b1步;其中a1为正常运行时消隙锁紧机构可达解锁开关位置的步数值加一定的裕度值;b1为消隙锁紧机构从解锁开关位置到解除锁紧状态位置的步数值;
13.若步进电机反向运行a1步后解锁开关输出信号仍为高,则以3档电流ωhz频率反向驱动。如果在c1步以内解锁开关输出信号变为低,则继续运行b1步,否则停止速度脉冲信号输出。
14.进一步的,消隙锁紧机构设置有两个霍尔传感器,分别为“解锁位置开关”和“锁紧位置开关”,开关关闭状态下输出为高电平,导通状态下输出为低电平。
15.进一步的,步进电机绕组为两相,工作方式为双四拍运行,步进电机绕组控制方式为恒流控制。
16.进一步的,通过模拟开关选通电路,实现步进电机电流从小到大的3档可调,1档为100ma,2档为110ma,3档为120ma。
17.进一步的,步进电机控制信号包括四类,具体为:
18.电机速度脉冲控制信号:驱动线路接收速度脉冲信号后驱动步进电机转动,每个脉冲对应1步;通过设置速度脉冲的频率,可调整对步进电机的速度控制;步进电机转动最大速度为400
°
/s,步进电机为四相步进电机,双四拍工作,200步/转,消隙机构脉冲频率范围为:小于220hz;
19.电机方向电平控制信号:为1时表示正向转动,此时控制电平为高电平4~5v;为0时表示反向转动,此时控制电平为低电平0~0.7v;
20.模式选择信号1和模式选择信号2:
21.档位模式选择信号1模式选择信号21档0(低电平)0(低电平)2档1(高电平)0(低电平)3档0(低电平)1(高电平)
22.高、低电平是指发送至驱动线路的控制电平。
23.进一步的,a为正常运行时消隙锁紧机构可达锁紧开关位置的步数值加预设的裕度值,c为故障检测判断值,a>c;b为消隙锁紧机构从锁紧开关位置到锁紧状态位置的步数值,与机构特性相关,远小于c。
24.进一步的,
25.a1为正常运行时消隙锁紧机构可达解锁开关位置的步数值加一定的裕度值,c1为故障检测判断值,a1>c1;b1为消隙锁紧机构从解锁开关位置到解除锁紧状态位置的步数值,与机构特性相关,远小于c1。
26.进一步的,本发明还提出一种消隙锁紧机构驱动控制系统,包括:
27.正向锁紧模式电流调节控制模块:消隙锁紧机构步进电机在正向锁紧模式时,消隙锁紧机构驱动线路接到数据指令“消隙机构正向锁紧”指令后,以1档电流ωhz频率,正向驱动;若步进电机正向运行a步以内检测到锁紧位置开关输出信号由高变低,则继续正向运行b步;其中a为正常运行时消隙锁紧机构可达锁紧开关位置的步数值加一定的裕度值;b为消隙锁紧机构从锁紧开关位置到锁紧状态位置的步数值;若步进电机正向运行a步后锁紧开关输出信号仍为高,则以2档电流ωhz频率正向驱动;如果在c步以内锁紧开关输出信号
变为低,则继续前进b步,否则停止速度脉冲信号输出;其中c为故障检测判断值;
28.反向解锁模式电流调节控制模块:当消隙锁紧机构步进电机工作在反向解锁模式时,消隙锁紧机构驱动线路接到数据指令“消隙机构反向解锁”指令后,以2档电流ωhz频率,反向驱动;若步进电机反向运行a1步以内检测到解锁位置开关输出信号由高变低,则继续正向运行b1步;其中a1为正常运行时消隙锁紧机构可达解锁开关位置的步数值加一定的裕度值;b1为消隙锁紧机构从解锁开关位置到解除锁紧状态位置的步数值;若步进电机反向运行a1步后解锁开关输出信号仍为高,则以3档电流ωhz频率反向驱动。如果在c1步以内解锁开关输出信号变为低,则继续运行b1步,否则停止速度脉冲信号输出。
29.本发明与现有技术相比的有益效果是:
30.(1)本发明通过调节消隙机构步进电机在正向锁紧和反向解锁两种模式下的驱动电流大小,保证在执行正向锁紧任务过程中,机构的驱动力矩始终不大于反向解锁时的力矩,可有效避免机构运行时的卡死,已通过专项试验的试验结果验证了此方法的可行性。
31.(2)本发明方法通过星上计算机软件和消隙机构驱动线路硬件实现,计算量小,提高了可靠性,利于推广应用,可用于使用旋转关节分系统的卫星使用,具有较广的应用前景。
附图说明
32.图1为本发明消隙机构正向锁紧流程图;
33.图2为本发明消隙机构反向解锁流程图;
34.图3为电机驱动原理图。
具体实施方式
35.下面结合附图对本发明的具体实施方式进行进一步的详细描述。
36.本发明针对这一问题提出了一种空间航天器用消隙锁紧机构驱动控制方法,应用软件根据规划完成消隙机构的速度、方向及模式控制,并采集消隙机构输出的限位信号。通过硬件设计,电机驱动电流可调节,调节消隙锁紧机构步进电机在正向锁紧模式和反向解锁模式下的驱动电流大小,使得在执行正向锁紧任务过程中,消隙锁紧机构的驱动力矩始终不大于反向解锁时的力矩。
37.(1)驱动原理
38.如图3所示,驱动线路采取细分电路设计,使电机以微小步距运转。电机绕组为两相,工作方式为双四拍运行,电机绕组控制方式为恒流控制。通过模拟开关选通电路,实现电机电流从小到大的3档可调,1档为100ma,2档为110ma,3档为120ma。消隙机构设置有2个霍尔传感器,分别为“解锁位置开关”和“锁紧位置开关”。开关关闭状态下输出为高电平,导通状态下输出为低。
39.电机控制信号包括四类,下表对电机控制信号进行详细说明。
40.表1电机控制信号
[0041][0042][0043]
(2)驱动控制方法
[0044]
a)消隙机构正向锁紧模式
[0045]
消隙机构驱动线路接到数据指令“消隙机构正向锁紧”指令后,以1档电流ωhz频率,正向驱动。
[0046]
若正向运行a步以内检测到锁紧开关输出信号由高变低,则继续正向运行b步。其中a为正常运行时机构可达锁紧开关位置的步数值加一定的裕度值;b为机构从锁紧开关位置到锁紧状态位置的步数值。
[0047]
若正向运行a步后锁紧开关输出信号仍为高,则以2档电流ωhz频率正向驱动。如果在c步以内锁紧开关输出信号变为低,则继续前进b步,否则停止速度脉冲信号输出。其中c为故障检测判断值。
[0048]
a为正常运行时消隙锁紧机构可达锁紧开关位置的步数值加预设的裕度值,c为故障检测判断值,a>c且一般数值设置较大;b为消隙锁紧机构从锁紧开关位置到锁紧状态位置的步数值,与机构特性相关,一般数值设置较小,远小于c。
[0049]
b)消隙机构反向解锁模式
[0050]
消隙机构驱动线路接到数据指令“消隙机构反向解锁”指令后,以2档电流ωhz频率,反向驱动。
[0051]
若反向运行a1步以内检测到解锁开关输出信号由高变低,则继续正向运行b1步。其中a1为正常运行时机构可达解锁开关位置的步数值加一定的裕度值;b1为机构从解锁开关位置到解除锁紧状态位置的步数值。
[0052]
若反向运行a1步后解锁开关输出信号仍为高,则以3档电流ωhz频率反向驱动。如果在c1步以内解锁开关输出信号变为低,则继续运行b1步,否则停止速度脉冲信号输出。
[0053]
a1为正常运行时消隙锁紧机构可达解锁开关位置的步数值加一定的裕度值,c1为故障检测判断值,a1>c1且一般数值设置较大;b1为消隙锁紧机构从解锁开关位置到解除锁紧状态位置的步数值,与机构特性相关,一般数值设置较小,远小于c1。
[0054]
进一步的,本发明还提出一种消隙锁紧机构驱动控制系统,包括:
[0055]
正向锁紧模式电流调节控制模块:消隙锁紧机构步进电机在正向锁紧模式时,消隙锁紧机构驱动线路接到数据指令“消隙机构正向锁紧”指令后,以1档电流ωhz频率,正向驱动;若步进电机正向运行a步以内检测到锁紧位置开关输出信号由高变低,则继续正向运行b步;其中a为正常运行时消隙锁紧机构可达锁紧开关位置的步数值加一定的裕度值;b为消隙锁紧机构从锁紧开关位置到锁紧状态位置的步数值;若步进电机正向运行a步后锁紧开关输出信号仍为高,则以2档电流ωhz频率正向驱动;如果在c步以内锁紧开关输出信号变为低,则继续前进b步,否则停止速度脉冲信号输出;其中c为故障检测判断值;
[0056]
反向解锁模式电流调节控制模块:当消隙锁紧机构步进电机工作在反向解锁模式时,消隙锁紧机构驱动线路接到数据指令“消隙机构反向解锁”指令后,以2档电流ωhz频率,反向驱动;若步进电机反向运行a1步以内检测到解锁位置开关输出信号由高变低,则继续正向运行b1步;其中a1为正常运行时消隙锁紧机构可达解锁开关位置的步数值加一定的裕度值;b1为消隙锁紧机构从解锁开关位置到解除锁紧状态位置的步数值;若步进电机反向运行a1步后解锁开关输出信号仍为高,则以3档电流ωhz频率反向驱动。如果在c1步以内解锁开关输出信号变为低,则继续运行b1步,否则停止速度脉冲信号输出。
[0057]
实施例:
[0058]
控制计算机可以通过固定地址注入方式进行消隙机构的控制,涉及的固定地址注入信息包括:
[0059][0060]
(1)消隙机构正向锁紧
[0061]
a)控制方式
[0062]
消隙机构的使用要求为:消隙机构接到机构正向锁紧时,以1档电流200hz频率驱动,正常情况下,正向(由电机方向电平决定)运行50000步左右后将运行至锁紧开关位置。
[0063]
若正向运行50000步以内检测到锁紧霍尔输出信号由高变低,则继续前进1000步;
[0064]
若正向运行50000步后锁紧霍尔输出信号仍为高,则以2档电流200hz频率正向驱动。如果在20000步以内锁紧霍尔输出信号变为低,则继续前进1000步,否则关闭方向和速度脉冲信号,并由地面评估是否切备份。
[0065]
b)数据指令实现
[0066]
数据指令“消隙机构正向锁紧”执行的前提是同时满足下列条件:
[0067]
主份线路或备份线路处于加电状态;
[0068]
加电线路对应的电机转速设置注入参数为容许设置合法值;
[0069]
加电线路对应的限位信号1或限位信号2指示其处于“解锁位置”;
[0070]
如不满足,则该指令禁止执行,直接退出。
[0071]
按下述逻辑执行操作:
[0072]
设置加电线路对应的电机方向电平为正向;
[0073]
设置加电线路对应的电机的驱动电流分档为1档;
[0074]
计算锁紧任务的所需的总执行周期:run1_count=0.7*period;cnt1=0;cnt2=0;
[0075]
将固定地址参数“电机转速设置period”写入驱动函数后,每个控制周期判断:
[0076]
if1(霍尔器件指示为锁紧)
[0077][0078][0079]
(2)消隙机构反向解锁
[0080]
a)控制方式
[0081]
消隙机构的使用要求为:消隙机构接到机构反向解锁时,以2档电流200hz频率驱
动,正常情况下,反向(由电机方向电平决定)运行50000步左右后将运行至解锁开关位置。
[0082]
若正向运行50000步以内检测到解锁霍尔输出信号由高变低,则继续前进1000步;
[0083]
若反向运行50000步后解锁霍尔输出信号仍为高,则以3档电流200hz频率反向驱动。如果在20000步以内解锁霍尔输出信号变为低,则继续前进1000步,否则关闭方向和速度脉冲信号,并由地面评估是否切备份。
[0084]
b)数据指令实现
[0085]
数据指令“消隙机构反向解锁”执行的前提是同时满足下列条件:
[0086]
主份线路或备份线路处于加电状态;
[0087]
加电线路对应的电机转速设置注入参数为容许设置合法值;
[0088]
加电线路对应的限位信号1或限位信号2指示其处于“锁定位置”;
[0089]
如不满足,则该指令禁止执行,直接退出。
[0090]
按下述逻辑执行操作:
[0091]
设置加电线路对应的电机方向电平为反向;
[0092]
设置加电线路对应的电机的驱动电流分档为2档;
[0093]
计算解锁任务的所需的总执行周期:run2_count=0.7*period;cnt1=0;cnt2=0;
[0094]
将固定地址参数“电机转速设置period”写入驱动函数后,每个控制周期判断:
[0095]
if1(霍尔器件指示为解锁)
[0096][0097][0098]
本发明通过调节消隙机构步进电机在正向锁紧和反向解锁两种模式下的驱动电流大小,保证在执行正向锁紧任务过程中,机构的驱动力矩始终不大于反向解锁时的力矩,可有效避免机构运行时的卡死。
[0099]
本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1