蜂巢式空中无人机发射回收装置、无人机、空中航母
1.本发明属于空中集群部署技术领域,具体涉及一种蜂巢式空中无人机发射回收装置、无人机、空中航母。
背景技术:
2.众所周知,航空母舰是现代最强悍的武器之一。它搭载带几十架高性能舰载战斗机,在预警机加持下可谓“要风得风,要雨得雨”。每一次危机地区,总能看到航母战斗群的身影。
3.人类的梦想从未停止,有了“海上机场”,想想“空中的机场”也就顺理成章了。科幻电影中,“空天母舰”早已是战场常客,科幻的外形,强悍的战力,让人热血沸腾心驰神往。
4.然而,各种类型空中母舰均停留在幻想、图纸以及试验阶段,均未能实现真正意义上的空中存放、运输、发放、回收、补给无人机,难以应用于当今社会。
技术实现要素:
5.本发明真对现有技术的不足,提出一种蜂巢式空中无人机发射回收装置、无人机、空中航母,目的在于解决现有技术各种类型空中母舰均停留在幻想、图纸以及试验阶段,均未能实现真正意义上的空中存放、运输、发放、回收、补给无人机,难以应用于当今社会的问题。
6.本发明为解决其技术问题采用以下技术方案:
7.一种多模块可重构蜂巢式空中集群投放/回收装置,该装置为多个吊舱1
‑
1组成的多模块蜂巢吊舱组合体;该多模块蜂巢吊舱组合体中每个蜂巢吊舱1
‑
1的侧面设有用于和相邻蜂巢吊舱1
‑
1进行拼接的拼接齿面1
‑1‑
7、拼接槽1
‑1‑
8,每个蜂巢吊舱1
‑
1的顶部还设有用于连接相邻蜂巢吊舱顶部的锁紧梁1
‑1‑
10;每个蜂巢吊舱设有六个侧面,该六个侧面交替设置有三个拼接槽和三个拼接齿面,该三个拼接槽用于与相邻的蜂巢吊舱的拼接齿面相吻合,该三个拼接齿面用于与相邻的蜂巢吊舱的拼接槽相吻合;所述的拼接采用垂直插拔方式;所述多模块蜂巢吊舱组合体的顶部采用多根锁紧梁1
‑1‑
10分别通过螺栓安装于各个蜂巢吊舱的连接板1
‑1‑
3上,多根锁紧梁1
‑1‑
10呈平面桁架蜘蛛网结构,拼接重组方便快捷,拼接组合体牢固可靠。
8.进一步地,所述蜂巢吊舱,拼接槽和拼接齿面的形状特征:角度2a=b=2c=120
°
,长度l1=l2,长度l3=l4,以确保拼接槽和拼接齿面能够严丝合缝的对接。
9.进一步地,所述多模块蜂巢吊舱组合体能够根据任务不同,快速拼接组合并重构成三模块蜂巢吊舱组合体1
‑1‑
12、四模块蜂巢吊舱组合体1
‑1‑
13、七模块蜂巢吊舱组合体1
‑1‑
14、十九模块蜂巢吊舱组合体等多种组合体1
‑1‑
15。
10.进一步地,所述吊舱,包括舱体1
‑1‑
4、舱体内的上支撑板1
‑1‑
17、下支撑板1
‑1‑
16,还包括升降绳1
‑1‑
11
‑
18、喇叭状回收装置1
‑1‑
2、连接板1
‑1‑
3、舱体1
‑1‑
4、舱门铰接杆1
‑1‑
5、舱体铰接杆1
‑1‑
6、拼接齿面1
‑1‑
7、拼接槽1
‑1‑
8、舱门1
‑1‑
9、以及舱门同步变形机
构1
‑1‑
11;
11.所述的舱门同步变形机构1
‑1‑
11布设在上支撑板1
‑1‑
17、下支撑板1
‑1‑
16之间,所述的喇叭状回收装置1
‑1‑
2固装在下支撑板的1
‑1‑
16的下表面;所述的上支撑板1
‑1‑
17上固装有电池1
‑1‑
18、控制器1
‑1‑
19;电源管理系统1
‑1‑
20;所述升降绳1
‑1‑
11
‑
18布设在上支撑板1
‑1‑
17、下支撑板1
‑1‑
16之间的舱门同步变形机构1
‑1‑
11上;
12.所述升降绳1
‑1‑
11
‑
18下端连接喇叭状回收装置1
‑1‑
2、实现喇叭状回收装置1
‑1‑
2的上升与下降;所述喇叭状回收装置1
‑1‑
2,其上端通过升降绳1
‑1‑
11
‑
18悬吊于舱体内部,其下端通过喇叭状端口对接和锁紧被回收的无人机2、从而带动无人机2的上升与下降;所述连接板1
‑1‑
3安装于舱体1
‑1‑
4的顶部、该连接板1
‑1‑
3用于安装蜂巢吊舱1
‑
1顶部的锁紧梁1
‑1‑
10;所述舱门1
‑1‑
9通过舱门铰接杆1
‑1‑
5和舱体铰接杆1
‑1‑
6铰接于舱体1
‑1‑
4上,并通过舱门同步变形机构1
‑1‑
11实现多个1
‑1‑
9同步多瓣花开式开启与关闭,在满足舱门1
‑1‑
9快速同步开启的同时,又不影响相邻蜂巢吊舱的舱门的开启,结构紧凑,从而实现多个蜂巢吊舱的组合体同时独立发放及回收无人机。
13.进一步地,所述舱门同步变形机构1
‑1‑
11分为上层和下层,该上层为锥绳螺旋槽绳传动机构和升降机构、该下层为阿基米德螺旋槽多向同步伸缩机构,舱门同步变形机构1
‑1‑
11,在上层,将电机的旋转运动转换成螺旋运动和升降运动,在下层,将上层的螺旋运动同时转换成多方向的同步伸缩运动。
14.一种多模块可重构蜂巢式空中集群投放/回收装置的无人机2,其特点是:该无人机2包括粗定位滚动回收杆2
‑
1、以及防碰撞同步折叠翼2
‑
2;所述粗定位滚动回收杆2
‑
1用于实现与蜂巢吊舱1
‑
1的喇叭状回收装置1
‑1‑
2快速粗定位并精确牢固锁紧;所述防碰撞同步折叠翼2
‑
2,用于实现无人机2与蜂巢吊舱1的喇叭状回收装置1
‑1‑
2对接后折叠变形,大大降低了存放占用的空间,减小了蜂巢式舱体的体积,为多蜂巢式舱体的组合拼装提供了空间保障,无人机防碰撞结构可防止对接及其他场景下无人机磕碰导致损坏现象的出现。
15.一种多模块可重构蜂巢式空中集群投放/回收装置的飞艇式空中航母3,其特点是:包括多模块蜂巢吊舱组合体、无人机2、和飞艇3
‑
1;其中多模块蜂巢吊舱组合体通过呈平面桁架蜘蛛网结构的多根锁紧梁1
‑1‑
10固定安装于飞艇3
‑
1底部,安装有多个蜂巢吊舱的飞艇3
‑
1通过投放和回收无人机2,可实现军事侦察、军事作战、灾害救援、气候检测、交通调度、物资投放、空中基站等功能。
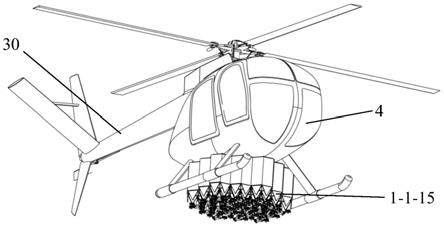
16.一种多模块可重构蜂巢式空中集群投放/回收装置的直升机式空中航母4),其特点是:包括多模块蜂巢吊舱组合体、直升机4
‑
1和无人机2;其中多模块蜂巢吊舱组合体通过呈平面桁架蜘蛛网结构的多根锁紧梁1
‑1‑
10可固定安装于直升机4
‑
1的底部,安装有多模块蜂巢吊舱组合体的直升机4
‑
1通过投放回收无人机,可实现军事侦察、军事作战、灾害救援、气候检测、交通调度、物资投放、空中基站等功能。
17.一种多模块可重构蜂巢式空中集群投放/回收装置的浮空气球式空中航母5),其特点是:包括多模块蜂巢吊舱组合体、浮空气球5
‑
1、降落伞5
‑
2、连接杆5
‑
3、连杆支座5
‑
4、中央回转5
‑
5和无人机2;其中多模块蜂巢吊舱组合体通过呈平面桁架蜘蛛网结构多根锁紧梁1
‑1‑
10、多根连接杆5
‑
3、多个连杆支座5
‑
4以及中央回转体5
‑
5可固定安装于浮空气球5
‑
1及降落伞5
‑
2)底部,装有多个蜂巢吊舱的浮空气球5
‑
1通过投放回收无人机2,可实现军事侦察、军事作战、灾害救援、气候检测、交通调度、物资投放、空中基站等功能。
18.本发明的优点效果
19.1、该空中航母利用大型浮空器或大型直升机作为浮空载体,利用多模块可重构蜂巢式舱体作为无人机存放、运输、发放、回收、补给的多模块单元,各单元可根据任务情况随意拼接组合并重构,可实现多架无人机空中存放、运输、发放、回收、补给等,可应用于军事侦察、军事作战、灾害救援、气候检测、交通调度、物资投放、空中基站等多个领域,成本低、覆盖范围大、实施难度小、应用领域广等。
20.2、各蜂巢式舱体采用蜂巢式结构形式,并且蜂巢六个面交替设置有三个拼接槽和三个拼接齿面,拼接槽与拼接齿面高度吻合,蜂巢式舱体的拼接槽与相邻的蜂巢式舱体的拼接齿面吻合,蜂巢式舱体的拼接齿面与相邻的蜂巢式舱体的拼接槽吻合,拼接采用垂直插拔方式,可根据任务不同快速拼接组合并重构,然后顶部采用多根锁紧梁将多个蜂巢式舱体连接成一体,多根锁紧梁呈平面桁架蜘蛛网结构,拼接重组方便快捷,拼接组合体牢固可靠。
21.3、蜂巢式舱体采用六瓣花开式同步开启式舱门结构,在满足舱门快速同步开启的同时,又不影响相邻蜂巢式舱体舱门的开启,结构紧凑,从而实现多个蜂巢式舱体的组合体同时独立发放及回收无人机。
22.4、喇叭状回收装置可实现无人机粗定位对接、无人机精确牢固锁紧、无人机折叠指令下发、无人机升降、无人机收发、无人机吊挂、无人机充电等,从而实现多架无人机同步或分批发放、回收、充电、吊挂、升降、锁定、防晃等。
23.5、无人机采用粗定位滚动杆结构,可实现与蜂巢式舱体的喇叭状回收装置快速粗定位并精确牢固锁紧;无人机采用防碰撞同步折叠翼结构,实现无人机与蜂巢式舱体的喇叭状回收装置对接后折叠变形,大大降低了存放占用的空间,减小了蜂巢式舱体的体积,为多蜂巢式舱体的组合拼装提供了空间保障,无人机防碰撞结构可防止对接及其他场景下无人机磕碰导致损坏现象的出现。
24.6、多个蜂巢式舱体所组成的组合体通过呈平面桁架蜘蛛网结构的多根锁紧梁可固定安装于大型飞艇底部,安装有多个蜂巢式舱体的飞艇通过发放回收无人机,可实现军事侦察、军事作战、灾害救援、气候检测、交通调度、物资投放、空中基站等功能。
25.7、多个蜂巢式舱体所组成的组合体通过呈平面桁架蜘蛛网结构的多根锁紧梁可固定安装于大型直升机底部,安装有多个蜂巢式舱体的直升机通过发放回收无人机,可实现军事侦察、军事作战、灾害救援、气候检测、交通调度、物资投放、空中基站等功能。
26.8、多个蜂巢式舱体所组成的组合体通过呈平面桁架蜘蛛网结构多根锁紧梁、多根连接杆以及中央回转体可固定安装于浮空气球底部,装有多个蜂巢式舱体的浮空器求通过发放回收无人机,可实现军事侦察、军事作战、灾害救援、气候检测、交通调度、物资投放、空中基站等功能。
附图说明
27.图1为本发明中蜂巢吊舱准备回收无人机示意图;
28.图2为本发明中蜂巢吊舱回收无人机示意图;
29.图3为本发明中蜂巢吊舱舱门关闭侧俯视图;
30.图4为本发明中蜂巢吊舱舱门关闭侧仰视图;
31.图5为本发明中拼接槽与拼接齿面参数图;
32.图6为本发明中三模块蜂巢吊舱重构示意图;
33.图7为本发明中四模块蜂巢吊舱重构示意图;
34.图8为本发明中七模块蜂巢吊舱重构示意图;
35.图9为本发明中十九模块蜂巢吊舱重构示意图;
36.图10为本发明中十九模块蜂巢吊舱舱门关闭侧仰图;
37.图11为本发明中十九模块蜂巢吊舱无人机发放完毕侧仰图;
38.图12为本发明中十九模块蜂巢吊舱无人机发放或回收中侧仰图;
39.图13为本发明中浮空气球用十九模块蜂巢吊舱舱门关闭状态图;
40.图14为本发明中浮空气球用十九模块蜂巢吊舱舱门开启状态图;
41.图15为本发明中十九模块蜂巢吊舱浮空气球发放或回收无人机状态图;
42.图16为本发明中十九模块蜂巢吊舱浮空气球满载及空载状态图;
43.图17为本发明中十九模块蜂巢吊舱飞艇发放或回收无人机状态图;
44.图18为本发明中十九模块蜂巢吊舱飞艇满载及空载状态图;
45.图19为本发明中十九模块蜂巢吊舱直升机发放或回收无人机状态图;
46.图20为本发明中十九模块蜂巢吊舱直升机满载及空载状态图;
47.图21为吊舱舱门关闭与无人机提升锁紧内部构造图;
48.图22为吊舱舱门开闭与无人机升降舱门同步变形机构运动原理示意图;
49.图23为吊舱舱门开闭与无人机升降舱门同步变形机构运动原理剖面图;
50.图24为本发明舱门开启多连杆机构运动原理示意图。
51.图25为吊舱与无人机对接后示意图;
52.图26为无人机空中回收锁定状态剖面图;
53.图27为喇叭状回收锁紧机构示意图。
54.其中,1
‑
1:蜂巢吊舱;1
‑1‑
1:升降绳;1
‑1‑
2:喇叭状回收装置;1
‑1‑2‑
0:锁紧爪;1
‑1‑2‑
1:锁紧爪固定架;1
‑1‑2‑
2:中空减速器;1
‑1‑2‑
3:中空电机;1
‑1‑2‑
4:中空吊绳;1
‑1‑2‑
5:吊舱端充电线;1
‑1‑2‑
6:锁紧机构柱形壳;1
‑1‑2‑
7:无人机端充电线;1
‑1‑2‑
8:锁紧机构喇叭形粗定位锥板;1
‑1‑2‑
9:无人机电池;1
‑1‑2‑
10:、锁紧机构中心正极;1
‑1‑2‑
11:锁紧机构周圈负极;1
‑1‑2‑
12:控制器;1
‑1‑2‑
13:变形电机;1
‑1‑
3:连接板;1
‑1‑
4:舱体;1
‑1‑
5;舱门铰接杆;1
‑1‑
6:舱体铰接杆;1
‑1‑
7:拼接齿面;1
‑1‑
8:拼接槽;1
‑1‑
9:舱门;1
‑1‑
10:锁紧梁;1
‑1‑
11:舱门同步变形机构;1
‑1‑
11
‑
1:被动螺旋锥;1
‑1‑
11
‑
2:绞盘;1
‑1‑
11
‑
3:主动螺旋锥;1
‑1‑
11
‑
4:螺旋锥支撑板;1
‑1‑
11
‑
5:电机;1
‑1‑
11
‑
6:电机支架;1
‑1‑
11
‑
7:传动绳;1
‑1‑
11
‑
8:升降绳;1
‑1‑
11
‑
9:螺旋锥螺旋槽;1
‑1‑
11
‑
10:滑动支撑盘;1
‑1‑
11
‑
11:螺旋盘(螺旋上盘、螺旋下盘);1
‑1‑
11
‑
12:螺旋盘螺旋槽;1
‑1‑
11
‑
13:传动销钉;1
‑1‑
11
‑
14:伸缩杆;1
‑1‑
11
‑
15:摆臂连杆;1
‑1‑
11
‑
16:升降杆、1
‑1‑
11
‑
17:舱门开闭连杆;1
‑1‑
11
‑
18:六连杆机构;1
‑1‑
11
‑
19:升降杆固定环;1
‑1‑
11
‑
20:支撑辊;1
‑1‑
11
‑
21:支撑杆;1
‑1‑
11
‑
22:传动绳端部固定器;1
‑1‑
12:三模块蜂巢吊舱组合体;1
‑1‑
13、四模块蜂巢吊舱组合体;1
‑1‑
14:七模块蜂巢吊舱组合体;1
‑1‑
15:十九模块蜂巢吊舱组合体;1
‑1‑
16:下支撑板;1
‑1‑
17:上支撑板;1
‑1‑
18:电池;1
‑1‑
19:控制器;1
‑1‑
20:电源管理系统;
55.2:无人机;2
‑
1:粗定位滚动回收杆;2
‑
2、防碰撞同步折叠翼;
56.3:飞艇式空中航母;3
‑
1:飞艇;
57.4:直升机式空中航母;4
‑
1:直升机;
58.5:浮空气球式空中航母;5
‑
1;浮空气球;5
‑
2:降落伞;5
‑
3:连接杆;5
‑
4:连杆支座;5
‑
5:中央回转体;5
‑
6、十九模块蜂巢吊舱组合体(含多连杆连接机构);
具体实施方式
59.本发明设计原理:
60.1、“空中航母”的设计难点。难点之一是解决空中航母的负载空间问题,空中航母的负载空间受到很大限制、负载空间越大则重力越大,作为载体,不论是直升飞机、或飞艇、或浮空气球,载体在空中克服重力和在海上克服重力要复杂得多、困难得多,所以,空中航母第一要解决缩小负载空间的问题;难点之二是解决空中航母的发射和回收问题,海上航母飞机的发射和回收依靠巨大的平台,但空中没有飞机起跑平台和回落平台;难点之三是解决空中诸多无人机的存储方式问题。海上航母的几十架飞机存储在巨大的平台上,空中航母没有这个平台。
61.2、本发明空中航母设计原理。第一、采用折叠翼结构解决负载空间问题,无人机采用防碰撞同步折叠翼结构,实现无人机与蜂巢式舱体的喇叭状回收装置对接后折叠变形,大大降低了存放占用的空间,减小了蜂巢式舱体的体积,为多蜂巢式舱体的组合拼装提供了空间保障。第二、采用喇叭状回收装置和复合驱动的舱门同步变形机构解决空中发射和接受问题。喇叭状回收装置结合舱门同步变形机构可实现无人机粗定位对接、无人机精确牢固锁紧、无人机折叠指令下发、无人机升降、无人机收发、无人机吊挂、无人机充电等,从而实现多架无人机同步或分批发放、回收、充电、吊挂、升降、锁定、防晃等。第三,采用蜂巢式舱体解决存储平台问题。1)蜂巢式舱体采用蜂巢式结构形式,并且蜂巢六个面交替设置有三个拼接槽和三个拼接齿面,拼接槽与拼接齿面高度吻合,蜂巢式舱体的拼接槽与相邻的蜂巢式舱体的拼接齿面吻合,蜂巢式舱体的拼接齿面与相邻的蜂巢式舱体的拼接槽吻合,拼接采用垂直插拔方式,可根据任务不同快速拼接组合并重构,然后顶部采用多根锁紧梁将多个蜂巢式舱体连接成一体;2)多根锁紧梁呈平面桁架蜘蛛网结构,拼接重组方便快捷,拼接组合体牢固可靠蜂巢式舱体采用六瓣花开式同步开启式舱门结构,在满足舱门快速同步开启的同时,又不影响相邻蜂巢式舱体舱门的开启,结构紧凑,从而实现多个蜂巢式舱体的组合体同时独立发放及回收无人机。3)多个蜂巢式舱体所组成的组合体通过呈平面桁架蜘蛛网结构多根锁紧梁、多根连接杆以及中央回转体可固定安装于浮空气球底部、或直升飞机底部、或大型飞艇底部,通过发射、回收无人机,可实现军事侦察、军事作战、灾害救援、气候检测、交通调度、物资投放、空中基站等功能。
62.基于以上发明原理,本发明设计了一种蜂巢式空中无人机发射回收装置、无人机、空中航母。
63.一种多模块可重构蜂巢式空中集群投放/回收装置,如图1、图2、图3、图4、图6、图7、图8、图9、图10、图11和图12所示,该装置为多个吊舱1
‑
1组成的多模块蜂巢吊舱组合体;该多模块蜂巢吊舱组合体中每个蜂巢吊舱1
‑
1的侧面设有用于和相邻蜂巢吊舱1
‑
1进行拼接的拼接齿面1
‑1‑
7、拼接槽1
‑1‑
8,每个蜂巢吊舱1
‑
1的顶部还设有用于连接相邻蜂巢吊舱顶部的锁紧梁1
‑1‑
10;每个蜂巢吊舱设有六个侧面,该六个侧面交替设置有三个拼接槽和
三个拼接齿面,该三个拼接槽用于与相邻的蜂巢吊舱的拼接齿面相吻合,该三个拼接齿面用于与相邻的蜂巢吊舱的拼接槽相吻合;所述的拼接采用垂直插拔方式;所述多模块蜂巢吊舱组合体的顶部采用多根锁紧梁1
‑1‑
10分别通过螺栓安装于各个蜂巢吊舱的连接板1
‑1‑
3上,多根锁紧梁1
‑1‑
10呈平面桁架蜘蛛网结构,拼接重组方便快捷,拼接组合体牢固可靠。
64.所述蜂巢吊舱如图5所示,拼接槽和拼接齿面的形状特征:角度2a=b=2c=120
°
,长度l1=l2,长度l3=l4,以确保拼接槽和拼接齿面能够严丝合缝的对接。
65.如图6、图7、图8、图9所示,所述多模块蜂巢吊舱组合体能够根据任务不同,快速拼接组合并重构成三模块蜂巢吊舱组合体1
‑1‑
12、四模块蜂巢吊舱组合体1
‑1‑
13、七模块蜂巢吊舱组合体1
‑1‑
14、十九模块蜂巢吊舱组合体等多种组合体1
‑1‑
15。
66.如图1、图2、图3和图4所示,所述吊舱,包括舱体1
‑1‑
4、舱体内的上支撑板1
‑1‑
17、下支撑板1
‑1‑
16,还包括升降绳1
‑1‑
11
‑
18、喇叭状回收装置1
‑1‑
2、连接板1
‑1‑
3、舱体1
‑1‑
4、舱门铰接杆1
‑1‑
5、舱体铰接杆1
‑1‑
6、拼接齿面1
‑1‑
7、拼接槽1
‑1‑
8、舱门1
‑1‑
9、以及舱门同步变形机构1
‑1‑
11;
67.补充说明:
68.所述喇叭状回收装置1
‑1‑
2如图26、27所示,包括锁紧爪1
‑1‑2‑
0、锁紧爪固定架1
‑1‑2‑
1、中空减速器1
‑1‑2‑
2、中空电机1
‑1‑2‑
3、中空吊绳1
‑1‑2‑
4、吊舱端充电线1
‑1‑2‑
5、锁紧机构柱形壳1
‑1‑2‑
6、锁紧机构喇叭形粗定位锥板1
‑1‑2‑
8、锁紧机构中心正极1
‑1‑2‑
10、锁紧机构周圈负极1
‑1‑2‑
11;其中锁紧爪1
‑1‑2‑
0、锁紧爪固定架1
‑1‑2‑
1、中空减速器1
‑1‑2‑
2和中空电机1
‑1‑2‑
3依次串联安装组成锁紧装置,锁紧装置整体固定于锁紧机构柱形壳1
‑1‑2‑
6上,用来实现无人机锁紧功能;
69.所述中空吊绳1
‑1‑2‑
4安装于锁紧机构柱形壳1
‑1‑2‑
6顶部,用于悬吊回收锁紧机构,吊舱端充电线1
‑1‑2‑
5穿过中空减速器1
‑1‑2‑
2、中空电机1
‑1‑2‑
3以及中空吊绳1
‑1‑2‑
4连接于锁紧爪固定架1
‑1‑2‑
1上的锁紧机构中心正极1
‑1‑2‑
10和锁紧机构周圈负极1
‑1‑2‑
11上,另一端连接于吊舱内大的充电电源,从而实现用来实现空中回收后的无人机接触充电功能;
70.所述的舱门同步变形机构1
‑1‑
11布设在上支撑板1
‑1‑
17、下支撑板1
‑1‑
16之间,所述的喇叭状回收装置1
‑1‑
2固装在下支撑板的1
‑1‑
16的下表面;所述的上支撑板1
‑1‑
17上固装有电池1
‑1‑
18、控制器1
‑1‑
19;电源管理系统1
‑1‑
20;所述升降绳1
‑1‑
11
‑
18布设在上支撑板1
‑1‑
17、下支撑板1
‑1‑
16之间的舱门同步变形机构1
‑1‑
11上;
71.所述升降绳1
‑1‑
11
‑
18下端连接喇叭状回收装置1
‑1‑
2、实现喇叭状回收装置1
‑1‑
2的上升与下降;所述喇叭状回收装置1
‑1‑
2,其上端通过升降绳1
‑1‑
11
‑
18悬吊于舱体内部,其下端通过喇叭状端口对接和锁紧被回收的无人机2、从而带动无人机2的上升与下降;所述连接板1
‑1‑
3安装于舱体1
‑1‑
4的顶部、该连接板1
‑1‑
3用于安装蜂巢吊舱1
‑
1顶部的锁紧梁1
‑1‑
10;所述舱门1
‑1‑
9通过舱门铰接杆1
‑1‑
5和舱体铰接杆1
‑1‑
6铰接于舱体1
‑1‑
4上,并通过舱门同步变形机构1
‑1‑
11实现多个1
‑1‑
9同步多瓣花开式开启与关闭,在满足舱门1
‑1‑
9快速同步开启的同时,又不影响相邻蜂巢吊舱的舱门的开启,结构紧凑,从而实现多个蜂巢吊舱的组合体同时独立发放及回收无人机。
72.所述舱门同步变形机构1
‑1‑
11如图21、图22、图23、图24、图25所示,分为上层和下
层,该上层为锥绳螺旋槽绳传动机构和升降机构、该下层为阿基米德螺旋槽多向同步伸缩机构,舱门同步变形机构1
‑1‑
11,在上层,将电机的旋转运动转换成螺旋运动和升降运动,在下层,将上层的螺旋运动同时转换成多方向的同步伸缩运动。
73.补充说明:
74.所述上层的锥绳螺旋槽绳传动机构和升降机构如图21、图22、图23、图24、图25所示,沿水平方向依次设有:被动螺旋锥1
‑1‑
11
‑
1、绞盘1
‑1‑
11
‑
2、主动螺旋锥1
‑1‑
11
‑
3、螺旋锥支撑板1
‑1‑
11
‑
4;电机1
‑1‑
11
‑
5、电机支架1
‑1‑
11
‑
6、传动绳1
‑1‑
11
‑
7、升降绳1
‑1‑
11
‑
8、螺旋锥螺旋槽1
‑1‑
11
‑
9;该被动螺旋锥1
‑1‑
11
‑
1、绞盘1
‑1‑
11
‑
2、主动螺旋锥1
‑1‑
11
‑
3通过支杆依次串联,并通过两个螺旋锥支撑板1
‑1‑
11
‑
4固定安装于上支撑板1
‑1‑
17上;
75.该电机1
‑1‑
11
‑
5通过电机输出轴安装于所述主动螺旋锥1
‑1‑
11
‑
3内,并通过电机支架1
‑1‑
11
‑
6固定安装于上支撑板1
‑1‑
17上;该被动螺旋锥1
‑1‑
11
‑
1和主动螺旋锥1
‑1‑
11
‑
3布设于螺旋盘1
‑1‑
11
‑
11上,该螺旋锥螺旋槽1
‑1‑
11
‑
9和螺旋盘螺旋槽1
‑1‑
11
‑
12相互吻合,传动绳1
‑1‑
11
‑
7缠绕于主动螺旋锥的螺旋锥螺旋槽1
‑1‑
11
‑
9内和螺旋盘的螺旋盘螺旋槽1
‑1‑
11
‑
12内,传动绳1
‑1‑
11
‑
7两端传过螺旋盘1
‑1‑
11
‑
11上面的通孔固定于传动绳端部固定器1
‑1‑
11
‑
22上,升降绳1
‑1‑
11
‑
18缠绕于绞盘1
‑1‑
11
‑
2,电机1
‑1‑
11
‑
5转动带动主动螺旋锥1
‑1‑
11
‑
3、绞盘1
‑1‑
11
‑
2、被动螺旋锥旋转1
‑1‑
11
‑
1,从而带动升降绳1
‑1‑
1升降,并带动传动绳1
‑1‑
11
‑
7缠绕,从而带动螺旋盘1
‑1‑
11
‑
11旋转、以及带动六个传动销钉1
‑1‑
11
‑
13直线移动,最终带动六个伸缩杆1
‑1‑
11
‑
14直线移动,实现六个伸缩杆1
‑1‑
11
‑
14同步伸缩和升降绳1
‑1‑
11
‑
18同步升降运动;
76.所述下层的阿基米德螺旋槽多向同步伸缩机构,设有滑动支撑盘1
‑1‑
11
‑
10、螺旋盘1
‑1‑
11
‑
11、螺旋盘螺旋槽1
‑1‑
11
‑
12,滑动支撑盘1
‑1‑
11
‑
10固装于下支撑板1
‑1‑
16上,螺旋盘1
‑1‑
11
‑
11通过六个传动销钉1
‑1‑
11
‑
13、螺旋盘上的六条阿基米德螺旋槽、滑动支撑盘1
‑1‑
11
‑
10上的六个直线槽铰接于滑动支撑盘1
‑1‑
11
‑
10上,六个伸缩杆1
‑1‑
11
‑
14与六个传动销钉1
‑1‑
11
‑
13固定连接,通过六个传动销钉1
‑1‑
11
‑
13在螺旋盘1
‑1‑
11
‑
11上的六条阿基米德螺旋槽和滑动支撑盘1
‑1‑
11
‑
10上的六个直线槽内相对滑动,从而带动螺旋盘1
‑1‑
11
‑
11相对滑动支撑盘1
‑1‑
11
‑
10旋转,并带动六个传动销钉1
‑1‑
11
‑
13和六个伸缩杆1
‑1‑
11
‑
14直线运动。
77.一种无人机2,如图1、图2所示,该无人机2包括粗定位滚动回收杆2
‑
1、以及防碰撞同步折叠翼2
‑
2;所述粗定位滚动回收杆2
‑
1用于实现与蜂巢吊舱1
‑
1的喇叭状回收装置1
‑1‑
2快速粗定位并精确牢固锁紧;所述防碰撞同步折叠翼2
‑
2用于实现无人机2与蜂巢吊舱1的喇叭状回收装置1
‑1‑
2对接后折叠变形,大大降低了存放占用的空间,减小了蜂巢式舱体的体积,为多蜂巢式舱体的组合拼装提供了空间保障,无人机防碰撞结构可防止对接及其他场景下无人机磕碰导致损坏现象的出现。
78.一种飞艇式空中航母3,如图17和图18所示,包括多模块蜂巢吊舱组合体、无人机2、和飞艇3
‑
1;其中多模块蜂巢吊舱组合体通过呈平面桁架蜘蛛网结构的多根锁紧梁1
‑1‑
10固定安装于飞艇3
‑
1底部,安装有多个蜂巢吊舱的飞艇3
‑
1通过投放和回收无人机2,可实现军事侦察、军事作战、灾害救援、气候检测、交通调度、物资投放、空中基站等功能。
79.一种直升机式空中航母4,如图19和图20所示,包括多模块蜂巢吊舱组合体、直升机4
‑
1和无人机2;其中多模块蜂巢吊舱组合体通过呈平面桁架蜘蛛网结构的多根锁紧梁1
‑
1
‑
10可固定安装于直升机4
‑
1的底部,安装有多模块蜂巢吊舱组合体的直升机4
‑
1通过投放回收无人机,可实现军事侦察、军事作战、灾害救援、气候检测、交通调度、物资投放、空中基站等功能。
80.补充说明:
81.图17、图18、图19和图20中的多模块蜂巢吊舱组合体为十九模块蜂巢吊舱组合体1
‑1‑
15。
82.一种浮空气球式空中航母5,如图13、图14、图15和图16所示,包括多模块蜂巢吊舱组合体、浮空气球5
‑
1、降落伞5
‑
2、连接杆5
‑
3、连杆支座5
‑
4、中央回转体5
‑
5和无人机2(图15、图16中,待发射的无人机2存储在含多连杆连接机构的十九模块蜂巢吊舱组合体5
‑
6内);其中多模块蜂巢吊舱组合体通过呈平面桁架蜘蛛网结构多根锁紧梁1
‑1‑
10、多根连接杆5
‑
3、多个连杆支座5
‑
4以及中央回转体5
‑
5可固定安装于浮空气球5
‑
1及降落伞5
‑
2底部,装有多个蜂巢吊舱的浮空气球5
‑
1通过投放回收无人机2,可实现军事侦察、军事作战、灾害救援、气候检测、交通调度、物资投放、空中基站等功能。
83.以上所述并非是对本发明的限制,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明实质范围的前提下,还可以做出若干变化、改型、添加或替换,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1