一种飞机双侧杆操纵系统及其方法与流程
本技术属于飞机双侧杆操纵设计,具体涉及一种飞机双侧杆操纵系统及其方法。
背景技术:
1、飞机的操纵方式可分为驾驶盘操纵方式、侧杆操纵方式,其中,双侧杆操纵方式中,主、副侧杆布置于主、副驾驶员外侧操纵台上,驾驶员座椅上有专门的扶手可提供手臂支撑,只需要手腕小幅度动作即可实现对飞机的操纵,可降低驾驶员的工作负荷,且所占空间小,不会遮挡位于驾驶员前方的仪器、仪表,应用于电传飞机,相对于驾驶盘操纵方式具有突出的优势。
2、当前,双侧杆操纵方式中,布置于主、副驾驶员外侧操纵台上的主、副侧杆均可单独操纵,不能够进行联动,操纵权限分配不明,自动驾驶时无反驱,为主、副驾驶员的操纵带来不便。
3、鉴于上述技术缺陷的存在提出本技术。
4、需注意的是,以上背景技术内容的公开仅用于辅助理解本发明的发明构思及技术方案,其并不必然属于本专利申请的现有技术,在没有明确的证据表明上述内容在本技术的申请日已经公开的情况下,上述背景技术不应当用于评价本技术的新颖性和创造性。
技术实现思路
1、本技术的目的是提供一种飞机双侧杆操纵系统及其方法,以克服或减轻已知存在的至少一方面的技术缺陷。
2、本技术的技术方案是:
3、一方面提供一种飞机双侧杆操纵方法,包括:
4、在飞机主驾驶位置设置主侧杆,主侧杆配置有纵向指令传感器、横向指令传感器、权限切换及其自动驾驶断开按钮;
5、在飞机副驾驶位置设置副侧杆,副侧杆配置有纵向指令传感器、横向指令传感器、权限切换及其自动驾驶断开按钮;
6、设计飞机双侧杆操纵具有:
7、双侧操纵模态,操纵位移为主侧杆、副侧杆位移的代数和,最大不超过主侧杆、副侧杆的行程;
8、主侧锁定操纵模态,操纵位移为主侧杆的位移;
9、主侧临时操纵模态,操纵位移为主侧杆的位移;
10、副侧锁定操纵模态,操纵位移为副侧杆的位移;
11、副侧临时操纵模态,操纵位移为副侧杆的位移;
12、在飞机自动驾驶未接通的情形下,若主侧杆、副侧杆的纵向指令传感器、横向指令传感器处于正常状态,在飞机双侧杆操纵方法处于双侧操纵模态、副侧锁定操纵模态或副侧临时操纵模态的情形下,若按下主侧杆的权限切换及其自动驾驶断开按钮不超过操作模态切换响应时间,飞机双侧杆操纵方法切换到主侧临时操纵模态,松开该权限切换及其自动驾驶断开按钮后,飞机双侧杆操纵方法切换到双侧操纵模态;
13、在飞机自动驾驶未接通的情形下,若主侧杆、副侧杆的纵向指令传感器、横向指令传感器处于正常状态,若按下主侧杆的权限切换及其自动驾驶断开按钮超过操作模态切换响应时间,飞机双侧杆操纵方法切换到主侧锁定操纵模态,松开该权限切换及其自动驾驶断开按钮后,飞机双侧杆操纵方法保持在主侧锁定操纵模态,再次按下该权限切换及其自动驾驶断开按钮后,飞机双侧杆操纵方法切换到双侧操纵模态;
14、在飞机自动驾驶未接通的情形下,若主侧杆、副侧杆的纵向指令传感器、横向指令传感器处于正常状态,在飞机双侧杆操纵方法处于双侧操纵模态、主侧锁定操纵模态或主侧临时操纵模态的情形下,若按下副侧杆的权限切换及其自动驾驶断开按钮不超过操作模态切换响应时间,飞机双侧杆操纵方法切换到副侧临时操纵模态,松开该权限切换及其自动驾驶断开按钮后,飞机双侧杆操纵方法切换到双侧操纵模态;
15、在飞机自动驾驶未接通的情形下,若主侧杆、副侧杆的纵向指令传感器、横向指令传感器处于正常状态,若按下副侧杆的权限切换及其自动驾驶断开按钮超过操作模态切换响应时间,飞机双侧杆操纵方法切换到副侧锁定操纵模态,松开该权限切换及其自动驾驶断开按钮后,飞机双侧杆操纵方法保持在副侧锁定操纵模态,再次按下该权限切换及其自动驾驶断开按钮后,飞机双侧杆操纵方法切换到双侧操纵模态;
16、在飞机自动驾驶未接通的情形下,若主侧杆、副侧杆的纵向指令传感器、横向指令传感器处于正常状态,若同时按下主侧杆、副侧杆的权限切换及其自动驾驶断开按钮,飞机双侧杆操纵方法的操纵模态不发生变化;
17、在飞机自动驾驶未接通的情形下,若主侧杆的纵向指令传感器或横向指令传感器处于故障状态,飞机双侧杆操纵方法切换到副侧锁定操纵模态;
18、在飞机自动驾驶未接通的情形下,若副侧杆的纵向指令传感器或横向指令传感器处于故障状态,飞机双侧杆操纵方法切换到主侧锁定操纵模态;
19、在飞机自动驾驶接通的情形下,按下主侧杆或副侧杆的权限切换及其自动驾驶断开按钮,飞机自动驾驶断开,飞机双侧杆操纵方法恢复到飞机自动驾驶接通前的操纵模态,飞机自动驾驶断开报警,再次按下主侧杆或副侧杆的权限切换及其自动驾驶断开按钮,清除飞机自动驾驶断开报警。
20、根据本技术的至少一个实施例,上述的飞机双侧杆操纵方法中,操作模态切换响应时间为30s。
21、根据本技术的至少一个实施例,上述的飞机双侧杆操纵方法中,主侧杆还配置有俯仰配平开关;
22、副侧杆还配置有俯仰配平开关;
23、飞机双侧杆操纵处于:
24、双侧操纵模态时,俯仰配平指令采用主侧杆、副侧杆俯仰配平开关指令的或逻辑;
25、主侧锁定操纵模态时,俯仰配平指令采用主侧杆俯仰配平开关的指令;
26、主侧临时操纵模态时,俯仰配平指令采用主侧杆俯仰配平开关的指令;
27、副侧锁定操纵模态时,俯仰配平指令采用副侧杆俯仰配平开关的指令;
28、副侧临时操纵模态时,俯仰配平指令采用副侧杆俯仰配平开关的指令。
29、根据本技术的至少一个实施例,上述的飞机双侧杆操纵方法中,主侧杆还配置有权限指示灯;
30、副侧杆还配置有权限指示灯;
31、飞机双侧杆操纵处于:
32、双侧操纵模态时,主侧杆、副侧杆权限指示灯熄灭;
33、主侧锁定操纵模态时,主侧杆权限指示灯熄灭熄灭,副侧杆权限指示灯点亮;
34、主侧临时操纵模态时,主侧杆权限指示灯熄灭熄灭,副侧杆权限指示灯点亮;
35、副侧锁定操纵模态时,副侧杆权限指示灯熄灭熄灭,主侧杆权限指示灯点亮;
36、副侧临时操纵模态时,副侧杆权限指示灯熄灭熄灭,主侧杆权限指示灯点亮。
37、根据本技术的至少一个实施例,上述的飞机双侧杆操纵方法中,主侧杆还配置有对侧侧杆非中立信号灯,在副侧杆偏离中立位置时点亮,副侧杆回归中立位置时熄灭;
38、副侧杆还配置有对侧侧杆非中立信号灯,在主侧杆偏离中立位置时点亮,主侧杆回归中立位置时熄灭。
39、另一方面提供一种飞机双侧杆操纵系统,包括:
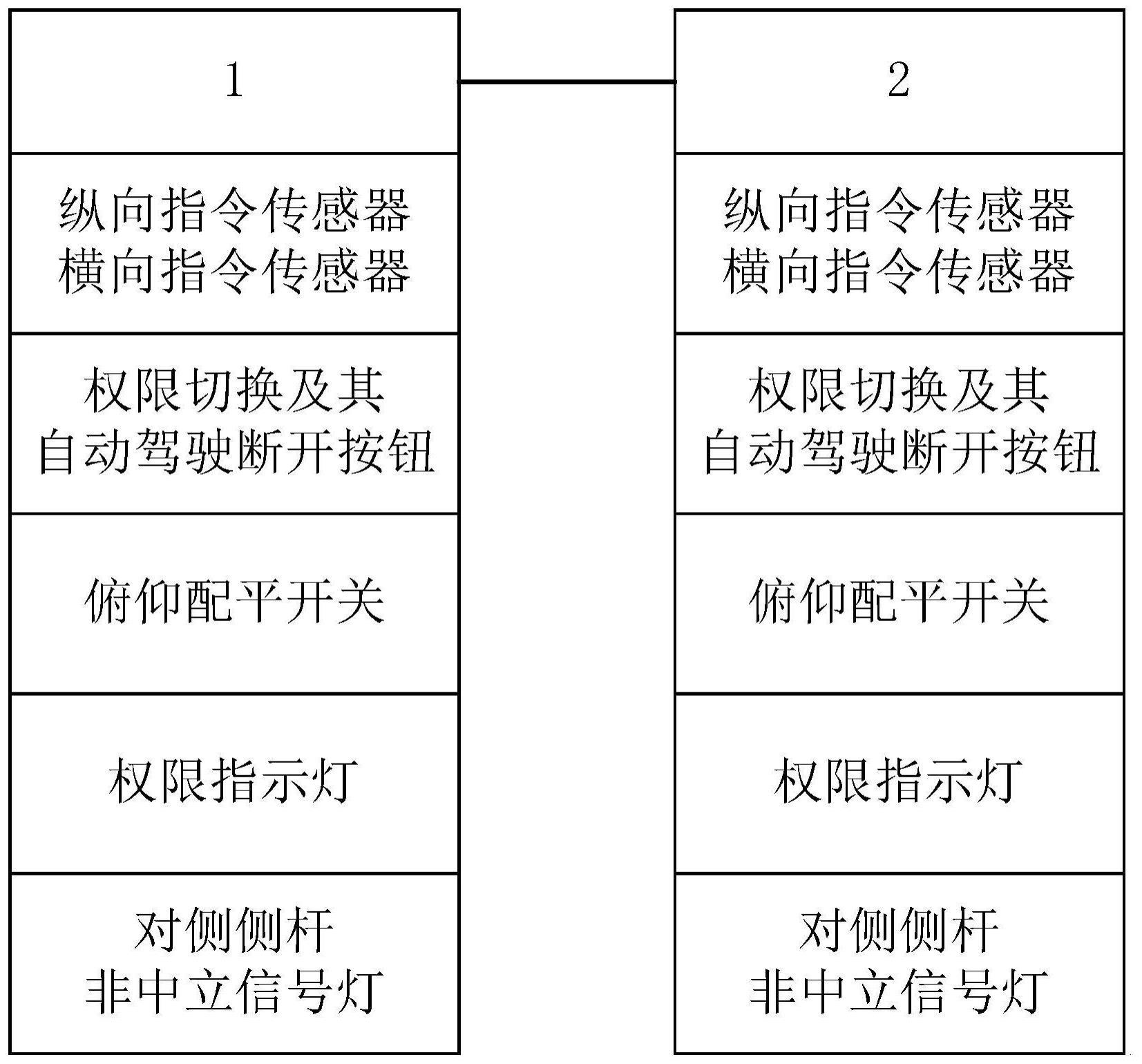
40、主侧杆,设置在飞机主驾驶位置,配置有纵向指令传感器、横向指令传感器、权限切换及其自动驾驶断开按钮;
41、副侧杆,设置在飞机副驾驶位置,配置有纵向指令传感器、横向指令传感器、权限切换及其自动驾驶断开按钮;
42、飞机双侧杆操纵系统具有:
43、双侧操纵模态,操纵位移为主侧杆、副侧杆位移的代数和,最大不超过主侧杆、副侧杆的行程;
44、主侧锁定操纵模态,操纵位移为主侧杆的位移;
45、主侧临时操纵模态,操纵位移为主侧杆的位移;
46、副侧锁定操纵模态,操纵位移为副侧杆的位移;
47、副侧临时操纵模态,操纵位移为副侧杆的位移;
48、在飞机自动驾驶未接通的情形下,若主侧杆、副侧杆的纵向指令传感器、横向指令传感器处于正常状态,在飞机双侧杆操纵系统处于双侧操纵模态、副侧锁定操纵模态或副侧临时操纵模态的情形下,若按下主侧杆的权限切换及其自动驾驶断开按钮不超过操作模态切换响应时间,飞机双侧杆操纵系统切换到主侧临时操纵模态,松开该权限切换及其自动驾驶断开按钮后,飞机双侧杆操纵系统切换到双侧操纵模态;
49、在飞机自动驾驶未接通的情形下,若主侧杆、副侧杆的纵向指令传感器、横向指令传感器处于正常状态,若按下主侧杆的权限切换及其自动驾驶断开按钮超过操作模态切换响应时间,飞机双侧杆操纵系统切换到主侧锁定操纵模态,松开该权限切换及其自动驾驶断开按钮后,飞机双侧杆操纵系统保持在主侧锁定操纵模态,再次按下该权限切换及其自动驾驶断开按钮后,飞机双侧杆操纵系统切换到双侧操纵模态;
50、在飞机自动驾驶未接通的情形下,若主侧杆、副侧杆的纵向指令传感器、横向指令传感器处于正常状态,在飞机双侧杆操纵系统处于双侧操纵模态、主侧锁定操纵模态或主侧临时操纵模态的情形下,若按下副侧杆的权限切换及其自动驾驶断开按钮不超过操作模态切换响应时间,飞机双侧杆操纵系统切换到副侧临时操纵模态,松开该权限切换及其自动驾驶断开按钮后,飞机双侧杆操纵系统切换到双侧操纵模态;
51、在飞机自动驾驶未接通的情形下,若主侧杆、副侧杆的纵向指令传感器、横向指令传感器处于正常状态,若按下副侧杆的权限切换及其自动驾驶断开按钮超过操作模态切换响应时间,飞机双侧杆操纵系统切换到副侧锁定操纵模态,松开该权限切换及其自动驾驶断开按钮后,飞机双侧杆操纵系统保持在副侧锁定操纵模态,再次按下该权限切换及其自动驾驶断开按钮后,飞机双侧杆操纵系统切换到双侧操纵模态;
52、在飞机自动驾驶未接通的情形下,若主侧杆、副侧杆的纵向指令传感器、横向指令传感器处于正常状态,若同时按下主侧杆、副侧杆的权限切换及其自动驾驶断开按钮,飞机双侧杆操纵系统的操纵模态不发生变化;
53、在飞机自动驾驶未接通的情形下,若主侧杆的纵向指令传感器或横向指令传感器处于故障状态,飞机双侧杆操纵系统切换到副侧锁定操纵模态;
54、在飞机自动驾驶未接通的情形下,若副侧杆的纵向指令传感器或横向指令传感器处于故障状态,飞机双侧杆操纵系统切换到主侧锁定操纵模态;
55、在飞机自动驾驶接通的情形下,按下主侧杆或副侧杆的权限切换及其自动驾驶断开按钮,飞机自动驾驶断开,飞机双侧杆操纵系统恢复到飞机自动驾驶接通前的操纵模态,飞机自动驾驶断开报警,再次按下主侧杆或副侧杆的权限切换及其自动驾驶断开按钮,清除飞机自动驾驶断开报警。
56、根据本技术的至少一个实施例,上述的飞机双侧杆操纵系统中,操作模态切换响应时间为30s。
57、根据本技术的至少一个实施例,上述的飞机双侧杆操纵系统中,,
58、主侧杆还配置有俯仰配平开关;
59、副侧杆还配置有俯仰配平开关;
60、飞机双侧杆操纵系统处于:
61、双侧操纵模态时,俯仰配平指令采用主侧杆、副侧杆俯仰配平开关指令的或逻辑;
62、主侧锁定操纵模态时,俯仰配平指令采用主侧杆俯仰配平开关的指令;
63、主侧临时操纵模态时,俯仰配平指令采用主侧杆俯仰配平开关的指令;
64、副侧锁定操纵模态时,俯仰配平指令采用副侧杆俯仰配平开关的指令;
65、副侧临时操纵模态时,俯仰配平指令采用副侧杆俯仰配平开关的指令。
66、根据本技术的至少一个实施例,上述的飞机双侧杆操纵系统中,主侧杆还配置有权限指示灯;
67、副侧杆还配置有权限指示灯;
68、飞机双侧杆操纵系统处于:
69、双侧操纵模态时,主侧杆、副侧杆权限指示灯熄灭;
70、主侧锁定操纵模态时,主侧杆权限指示灯熄灭熄灭,副侧杆权限指示灯点亮;
71、主侧临时操纵模态时,主侧杆权限指示灯熄灭熄灭,副侧杆权限指示灯点亮;
72、副侧锁定操纵模态时,副侧杆权限指示灯熄灭熄灭,主侧杆权限指示灯点亮;
73、副侧临时操纵模态时,副侧杆权限指示灯熄灭熄灭,主侧杆权限指示灯点亮。
74、根据本技术的至少一个实施例,上述的飞机双侧杆操纵系统中,主侧杆还配置有对侧侧杆非中立信号灯,在副侧杆偏离中立位置时点亮,副侧杆回归中立位置时熄灭;
75、副侧杆还配置有对侧侧杆非中立信号灯,在主侧杆偏离中立位置时点亮,主侧杆回归中立位置时熄灭。
- 还没有人留言评论。精彩留言会获得点赞!